


Портативный трибоэлектрический наногенератор для мониторинга дыхания в реальном времени
Аннотация
В качестве надежного индикатора физиологического здоровья человека частота дыхания используется во все большем количестве случаев для прогнозирования и диагностики потенциальных респираторных заболеваний и респираторной дисфункции, вызванной муковисцидозом. Однако по сравнению с интеллектуальной мобильной электроникой традиционные системы клинического мониторинга дыхания неудобны для работы в качестве домашних носимых устройств для мониторинга дыхания в режиме реального времени в повседневной жизни из-за их громоздкой конструкции, сложной работоспособности и зависимости от внешних источников питания. Таким образом, мы предлагаем носимый беспроводной датчик дыхания на основе трибоэлектрического наногенератора (TENG), работающий в режиме бокового скольжения, для мониторинга частоты дыхания путем измерения изменения окружности живота. В этой статье мы подтверждаем возможность использования устройства в качестве датчика мониторинга дыхания с помощью установленной теоретической модели и исследуем выходные характеристики датчика с помощью серии механических испытаний. Кроме того, применение датчика дыхания у разных людей, разных ритмов дыхания, разных активных состояний и беспроводной передачи было подтверждено множеством добровольных тестов. Все результаты демонстрируют потенциал предлагаемого носимого датчика как новой альтернативы для обнаружения и мониторинга частоты дыхания в реальном времени с общей применимостью и чувствительностью.
Введение
В связи с ухудшением глобального климата, увеличением серьезного загрязнения воздуха и тенденцией к ухудшению состояния пожилого населения здоровье человека, особенно здоровье дыхательной системы, подвергается все большим и большим угрозам [1,2,3]. Между тем мониторинг физического здоровья человека становится центром внимания для предотвращения скрытых заболеваний [4,5,6,7]. Частота дыхания, как один из наиболее важных и надежных показателей, непосредственно отражающих физиологическое здоровье человека, может предоставить ключевую информацию для прогнозирования и диагностики потенциальных респираторных заболеваний, таких как синдром обструктивного апноэ во сне (СОАС) и респираторная дисфункция, вызванная муковисцидозом [8, 9,10,11]. Для мониторинга состояния дыхания использовалось различное традиционное медицинское оборудование, а также прилагались огромные усилия для разработки инновационных технологий мониторинга дыхания. Несмотря на большую клиническую применимость и точность мониторинга, громоздкая конструкция, сложная работоспособность, зависимость от внешних источников питания и плохая портативность ограничивают их дальнейшее развитие в качестве интеллектуальной мобильной медицинской электроники. В последние годы достижения в области мобильных сетей и маломощной электроники привели к стремительному развитию интеллектуальных мобильных медицинских устройств и вызвали растущий интерес к домашнему здравоохранению и гибкой носимой электронике [6, 12,13,14,15,16, 17,18]. Поэтому носимые медицинские датчики без батарей с большим потенциалом для интеллектуального мониторинга дыхания пользуются повсеместным спросом.
По сравнению с некоторыми относительно развитыми технологиями поглощения биоэнергии, такими как электромагнитные [19, 20] и пьезоэлектрические [21,22,23,24,25], трибоэлектрические наногенераторы (TENG) [26,27,28,29,30], обладающие достоинствами легкий вес, высокая плотность энергии и высокая чувствительность датчиков обладают большим потенциалом в таких приложениях, как биоэнергетические комбайны, носимая электроника и устройства для мониторинга состояния здоровья с автономным питанием. Кроме того, сборщики энергии на основе TENG более способны поглощать биоэнергию в рабочей среде с полосой частот ниже 10 Гц, как дыхание человека [31, 32], а материалы, используемые для TENG, не содержат свинца, которые можно безопасно использовать для датчики здравоохранения. Таким образом, TENG, без сомнения, является одним из лучших вариантов носимых и автономных устройств для мониторинга дыхания. Чтобы удовлетворить растущий спрос на носимые устройства и технологии мониторинга состояния здоровья с автономным питанием, было разработано множество новых датчиков на основе TENG для мониторинга физиологического состояния человека. Lin et al. предложила систему беспроводной сети датчиков тела (BSN) с автономным питанием для мониторинга сердечного ритма через интеграция TENG на основе пушистой структуры (D-TENG), схемы управления питанием, датчика частоты сердечных сокращений на основе TENG, блока обработки сигналов и модуля Bluetooth для беспроводной передачи данных в 2018 г. [13]. P. Maharjan et al. в 2018 году разработал новый носимый гибридный электромагнитный-TENG в форме кривой (WHEM-TENG), работающий как электронные наручные часы, работающий за счет биомеханической энергии, полученной от поворотного рычага, который также был продемонстрирован для питания импульсного сигнала и мониторинга сердечного ритма [ 17]. Chen et al. сообщили о гибком гибридном наногенераторе с пьезоэлектрическими и трибоэлектрическими свойствами в 2017 году, который можно конформно прикрепить к мягким поверхностям, таким как кожа человека, для сбора разнообразных энергий прикосновения на основе электропряденого мата из нановолокна и отслеживания физиологических сигналов в реальном времени, таких как респираторная информация и пульс на лучевой артерии [ 33]. Cu et al. сообщили о датчике пульса на основе одноэлектродного TENG с высокой гибкостью и удобством для кожи человека в 2018 году, с помощью которого можно успешно получить типичную форму пульсовой волны человека, которая представляет волну давления в лучевой артерии [34]. Вышеупомянутые работы во многом способствовали развитию носимых и автономных интеллектуальных устройств на основе TENG для физического мониторинга человека.
Изменение окружности живота - это естественное физическое поведение человека во время процесса дыхания, поэтому получение информации о деформациях живота является сенсорным подходом и не оказывает негативного влияния на нормальную деятельность людей, которая также может быть возможным источником энергии за счет поглощения биокинетической энергии. . В этой статье мы предлагаем интегрированный беспроводной датчик дыхания, который можно носить на поясе, на основе скользящего режима TENG, который одновременно обладает такими достоинствами, как портативность, мобильность и интеллект. Его можно применять в различных повседневных делах для непрерывного мониторинга дыхания в режиме реального времени и обнаружения СОАС без отрицательного воздействия на нормальную работу устройства или на повседневную деятельность пользователя. Интеллектуальный пояс построен с датчиком TENG, чтобы определять изменение окружности живота пользователя во время дыхания и передавать периодические изменения возвратно-поступательным колебаниям трибопары TENG, так что электрические сигналы, содержащие информацию о дыхании, могут выводиться посредством ТЭН. Весь процесс зондирования не требует внешнего источника питания. Устройство также оснащено микросхемой беспроводной передачи данных, питаемой от внешнего источника, для передачи сигнала дыхания. Информация о состоянии дыхания будет наконец отображаться на мобильном телефоне. Здесь мы сообщаем об исследовательской работе над датчиком дыхания на основе TENG, чтобы продемонстрировать его превосходный потенциал в качестве возможного интеллектуального носимого устройства с автономным питанием для мониторинга дыхания в реальном времени.
Методы
Архитектура датчика дыхания
На рис. 1а представлена схематическая структура датчика дыхания на основе скользящего режима TENG. Датчик дыхания, который можно носить на поясе, предназначен для определения респираторного статуса пользователя в режиме реального времени в повседневной жизни, как показано на рис. 1a (i). Такая стратегия мониторинга не будет мешать повседневной деятельности пользователя, такой как прогулки, сон, приготовление пищи, работа в офисе и т.д. система передачи. Каждый слой двухслойной ленты, как показано на рис. 1a (ii), включает нерастяжимую часть, отмеченную черной линией, и деформируемую часть, отмеченную красной линией. Датчик TENG встроен в носимый двухслойный пояс с подробной структурой, показанной на рис. 1a (iii-iv). Пленка из политетрафторэтилена (ПТФЭ) толщиной 100 мкм и нейлоновая пленка толщиной 30 мкм используются в качестве негативного и позитивного трибоматериала соответственно. Две медные фольги толщиной 50 мкм каждая прикреплены к внешним поверхностям трибослоев в качестве проводящих электродов. Два акриловых листа используются в качестве опор, чтобы диэлектрические материалы оставались плоскими. Размер строгального станка ТЭН составляет 5 × 5 см 2 . Устройство TENG покрыто пластиковой оболочкой для обеспечения контакта между трибопарой во время процесса мониторинга дыхания.
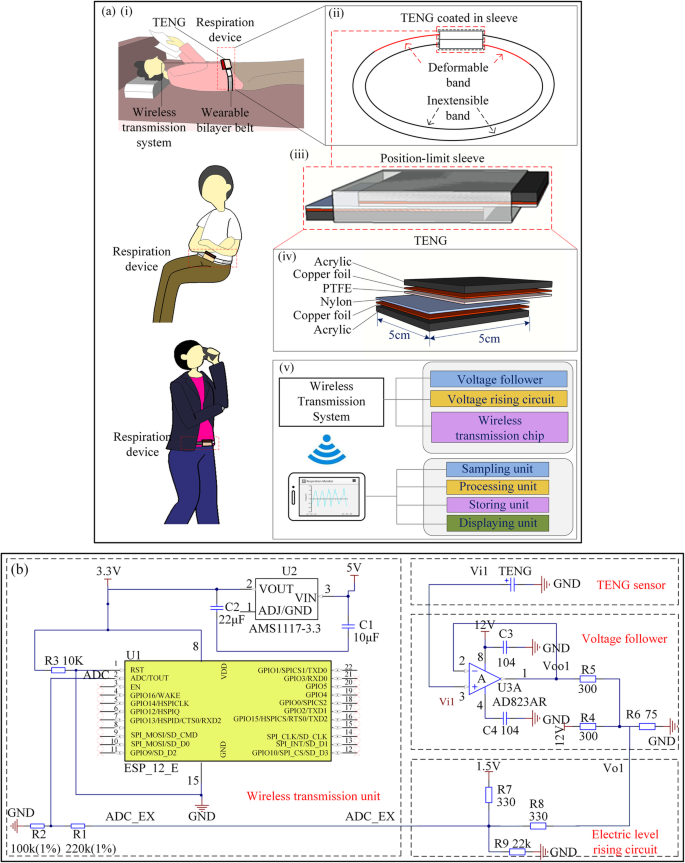
Изготовление переносного датчика дыхания и беспроводной системы передачи данных. а Схематическое изображение беспроводного датчика дыхания. (i) Схема ношения, (ii) структурный эскиз носимого устройства, (iii) увеличенный вид TENG и (iv) материальная иллюстрация TENG, и (v) функциональные модули, содержащиеся в системе беспроводной передачи. б Принципиальная схема системы беспроводной передачи
Конструкция устройства имеет ряд очевидных достоинств. Прежде всего, здесь используются деформируемые части ремня, чтобы приспособиться к расширению живота во время дыхания и предложить восстанавливающую силу при сокращении живота во время процесса вдоха, так что обнаружение в реальном времени с непрерывным сигналом будет реализовано через умный пояс без неприятных ощущений и негативного влияния на нормальную деятельность пользователя. Во-вторых, нерастяжимые части ремня используются для ограничения деформации ремня, чтобы гарантировать, что часть изменения окружности живота используется для управления скользящим поведением трибопары. Кроме того, простая конструкция и коммерческие материалы, используемые в устройстве, делают его недорогим и легким в изготовлении, что может облегчить его рыночные перспективы продвижения.
Кроме того, набор аппаратных и программных модулей применяется для формирования системы беспроводной передачи сигнала, и предполагается, что информация о дыхании в реальном времени отображается на мобильном телефоне (рис. 1a (v)). Как показано на рис. 1b, аппаратный модуль, состоящий из повторителя напряжения, цепи повышения напряжения и микросхемы беспроводной передачи, интегрирован в печатную плату. Замечено, что TENG выдает высокое напряжение, но относительно низкий ток, что приводит к высокому выходному сопротивлению и влияет на его применимость в системе беспроводной передачи. В связи с этим повторитель напряжения интегрирован в схему, чтобы снизить выходное сопротивление TENG, чтобы оно могло примерно соответствовать сопротивлению блока беспроводной передачи. Кроме того, с точки зрения практической применимости электрический выход TENG характеризуется как переменный ток, отрицательные значения которого не могут использоваться в качестве входного сигнала для аналогово-цифрового преобразователя (АЦП). Следовательно, электрическая схема повышения уровня используется для поднятия всей кривой выходного напряжения TENG до положительного уровня, чтобы АЦП регистрировал все сигналы. Микросхема беспроводной передачи состоит из АЦП, микропроцессора, антенны и батареи для обеспечения питания устройства. Программный модуль включает в себя блоки выборки, обработки сигналов, хранения и отображения сигналов. Посредством блоков выборки и обработки сигналов сигналы, передаваемые на мобильный телефон, преобразуются обратно в колебания с положительными и отрицательными составляющими, но формы и амплитуды сигналов не преобразуются обратно пропорционально исходным значениям на выходе TENG; таким образом, это только показатель частоты дыхания. А через блоки отображения и хранения сигналов передаваемые сигналы частоты дыхания в реальном времени систематически сохраняются и отображаются на мобильном телефоне.
Принцип распознавания и рабочий механизм
Человеческое дыхание обычно подразделяется на грудное и брюшное, и большинство из нас использует первый тип дыхания в повседневной жизни. Во время грудного дыхания брюшная полость периодически расширяется и сжимается, когда происходят процессы выдоха и вдоха, соответственно, что может вызывать растяжение и сжатие переносного ремня, прикрепленного вокруг талии. Между тем, трибопара вынуждена скользить наружу и внутрь из-за деформации окружности живота. Во время возвратно-поступательного скольжения статус дыхания будет получен через смарт-пояс с устройством TENG.
На рис.2 показан механизм работы датчика дыхания на основе скользящего режима ТЭНГ. Изменение окружности брюшной полости может способствовать относительному скольжению трибопары через носимый двухслойный ремень, вызывая прохождение переменного тока через внешнюю цепь, который будет улавливаться и обрабатываться как сигнал при мониторинге дыхания. В каждом рабочем цикле будет четыре процесса:начальный интимный контакт, скольжение наружу, короткая пауза и скольжение внутрь. В исходном состоянии, показанном на рис. 2а, поверхности трибопары полностью перекрываются и плотно контактируют друг с другом, а поверхность нейлоновой пленки и пленки ПТФЭ заряжены положительно и отрицательно, соответственно, из-за трибоэлектрического эффекта. и электростатическая индукция. На этой стадии отсутствует скольжение трибопары, поверхностные заряды которой находятся в статическом балансе без передачи заряда в цепи. Когда начинается выдох и трибо-пара начинает скользить наружу с расширением брюшной полости (рис. 2b), разделение трибоэлектрического заряда вызывает разность потенциалов между трибопарой. Следовательно, свободные электроны будут передаваться от одного электрода к другому через внешнюю цепь, и будет генерироваться импульс выходного напряжения с положительной амплитудой. Как только трибопара достигнет максимального расстояния скольжения во время процесса выдоха (рис. 2c), перенесенные заряды достигнут своего пикового значения, и через цепь больше не будет протекать ток. Затем следует процесс вдоха (рис. 2г), в котором трибопара начинает скользить внутрь при сокращении брюшной полости. Избыточные перенесенные заряды на электроды будут стекать обратно для нового электростатического баланса, и будет генерироваться импульс выходного напряжения с отрицательной амплитудой. Заряд не будет передаваться, поскольку заряженные поверхности трибопары полностью перекрываются, и устройство TENG вернется в состояние тесного контакта, как показано на рис. 2а. Таким образом, при возникновении повторяющихся колебаний наружу и внутрь между трибопарой электроны движутся вперед и назад в цепи между двумя электродами, создавая на выходе переменный ток.
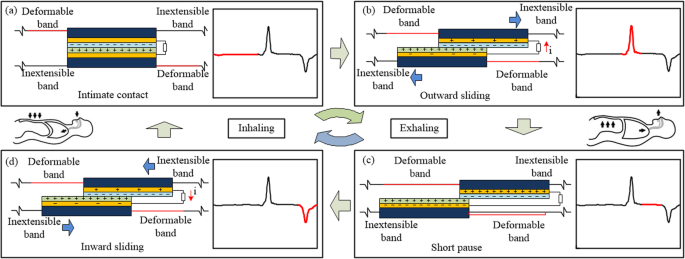
Схема рабочего механизма датчика дыхания и его четыре рабочих процесса. а Процесс «интимного контакта»:пользователь вдыхает, и поверхности трибопары полностью перекрываются. б Процесс «скольжения наружу»:пользователь выдыхает, и трибо-пара скользит наружу. c Процесс «короткой паузы»:пользователь выдыхает, и трибо-пара максимально выдвигается наружу. г Процесс «скольжения внутрь»:пользователь вдыхает, и трибо-пара скользит внутрь
Система измерения
Электрические выходные характеристики датчика дыхания регистрировались системным электрометром Keysight B2983A.
Результаты и обсуждение
Для клинического применения частота дыхания может предоставить жизненно важную информацию для раннего предупреждения и оперативной диагностики респираторных заболеваний, таких как СОАС. В этой статье предлагается носимый на поясе беспроводной датчик дыхания, чтобы предложить альтернативную стратегию для мониторинга дыхания в реальном времени путем определения изменения окружности живота в процессе дыхания и отображения беспроводного сигнала на мобильном телефоне. Конфигурация устройства содержит носимый двухслойный ремень, датчик TENG режима скольжения, встроенный в ремень, и систему беспроводной передачи. А применимость, портативность и точность устройства были подтверждены добровольцами с помощью теоретического анализа, механических испытаний и тестов в реальном времени.
Теоретический прогноз
Во-первых, создается аналитическая модель для прогнозирования выходных характеристик TENG и проверки возможности использования устройства в качестве датчика мониторинга дыхания. Тест в реальном времени проводится для проверки точности аналитической модели. Кроме того, корреляция между электрическими сигналами датчика и входным механическим возбуждением устанавливается и исследуется с помощью теоретической модели, которая обеспечивает лучшее понимание рабочего механизма датчика. Для этих целей предлагается теоретическая функция для моделирования процессов дыхания, которая включает стадии выдоха и вдоха. На стадии выдоха брюшная полость расширяется, и трибопара выдвигается наружу, так что смещение x (t) трибопары постепенно увеличивается от нуля до A . Тогда у трибопары остается максимальное смещение A до процесса ингаляции. На стадии вдоха брюшная полость сжимается, и трибопара начинает скользить внутрь, так что смещение x (t) постепенно уменьшается с A к нулю. После этого трибопара сохраняет нулевое смещение до следующего цикла дыхания. Согласно регулированию изменения x (t) во временной области предполагается, что возбуждение устройства представляет собой трапециевидную волну (рис. 3a), которая выражается как:
$$ x (t) =\ left \ {\ begin {array} {c} {v} _1t \\ {} A \\ {} A- {v} _2t \\ {} 0 \ end {array} \ kern0 .75em \ begin {array} {c} 0где d 0 = d 1 / ε r 1 + d 2 / ε r 2 эффективная толщина с d 1 ( г 2 ) и ε r 1 ( ε r 2 ) обозначает толщину и относительную диэлектрическую проницаемость диэлектрического слоя соответственно, ε 0 диэлектрическая проницаемость вакуума, σ поверхностная плотность заряда, R сопротивление нагрузки и S площадь диэлектрической пластины.
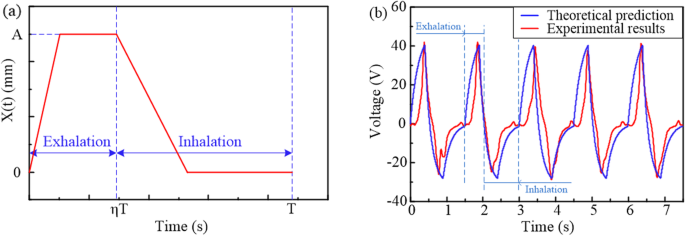
Корреляция между физическим движением при дыхании и выходным напряжением датчика TENG. а Предполагаемая трапециевидная форма смещения для теоретического предсказания. б Сравнение теоретического предсказания и экспериментальных результатов
Устройство используется в качестве футляра для теоретической проверки электромеханической модели с параметрами физических свойств и процесса нагружения, показанными в Табл. 1. Временная диаграмма рассчитанного выходного напряжения показана синей линией на рис. 3b, а измеренные сигналы напряжения - красной линией. Наблюдается отличное согласие между теоретическим предсказанием и измеренными сигналами, что позволяет предположить, что аналитическая модель точна для предсказания электрических выходов устройства в процессе дыхания. Кроме того, импульсы напряжения прогнозируемых сигналов дыхания показывают согласованность с процессами вдоха и выдоха. Сигналы повышаются и понижаются, проявляя себя с положительными и отрицательными сигналами с возникновением процессов выдоха и вдоха, соответственно. Кроме того, его можно использовать для оптимального проектирования датчика дыхания на основе TENG по структурным параметрам, чтобы повысить производительность и чувствительность.
Выходные характеристики
Было проведено механическое испытание для исследования влияния скользящего смещения трибопары на сигнал выходного напряжения устройства. Как показано на рис. 4а, два конца трибопары были зафиксированы на растягивающей машине, и трибопара была вынуждена совершать периодические возвратно-поступательные скользящие колебания через вытяжную машину, чтобы имитировать движение трибопары при дыхании. процесс. Между тем, временные характеристики скользящего смещения и тягового усилия в процессе растяжения были записаны для сравнения с сигналами напряжения, измеренными вольтметром, с сопротивлением нагрузки в электрической цепи 11 МОм. В механических испытаниях использовалось возбуждение трапецеидальной волной с частотой 0,5 Гц и амплитудой смещения от 2,5 до 30 мм. На рис. 4б красной линией показаны временные характеристики выходного напряжения, а зеленой и синей линиями - соответствующие временные характеристики скользящего смещения с амплитудой 30 мм и тягового усилия. На этапе I, когда смещение между трибопарой увеличивается с силой тяги машины, улавливается положительный импульс выходного напряжения. А на стадии II выходное напряжение показывает противоположные сигналы, в то время как сила тяги постепенно снижается, и смещение уменьшается. Периодическая характеристика сигналов напряжения хорошо согласуется с характеристиками скользящего смещения и тягового усилия установленного механического возбуждения, что демонстрирует возможность использования датчика TENG для мониторинга дыхания в реальном времени. Кроме того, полученные сигналы напряжения, очевидно, изменяются при различных амплитудах скольжения от 2,5 до 30 мм (рис. 4в), что позволяет исследовать влияние амплитуды смещения (т.е. глубины дыхания). Тенденция изменения пикового напряжения в зависимости от амплитуды смещения изображена на рис. 4d. Очевидно, что пиковое напряжение линейно увеличивается с амплитудой смещения, и зависимость изменения можно описать следующим образом:
$$ {V} _ {\ mathrm {peak}} =0,01383 {X} _ {\ mathrm {max}} + 0,0092 $$ (3)где V пик - пиковое значение выходного напряжения, а X макс означает максимальное скользящее смещение трибопары. Регулирование в формуле. (3) показывает взаимосвязь между пиковым напряжением и возбуждением смещения устройства с применимым диапазоном «2,5 мм≤ X макс ≤30 мм », что дает нам основу для изучения влияния окружности живота на пиковое напряжение и соответствие при прогнозировании пикового напряжения датчика в процессе дыхания. С другой стороны, рисунок 4d также показывает, что полезные электрические сигналы датчика могут быть захвачены с амплитудой тягового усилия и скользящего смещения всего лишь 3,09 Н и 2,5 мм, что означает, что устройством можно легко управлять с помощью вариация окружности живота, не вызывающая у пользователя дискомфортных ощущений.
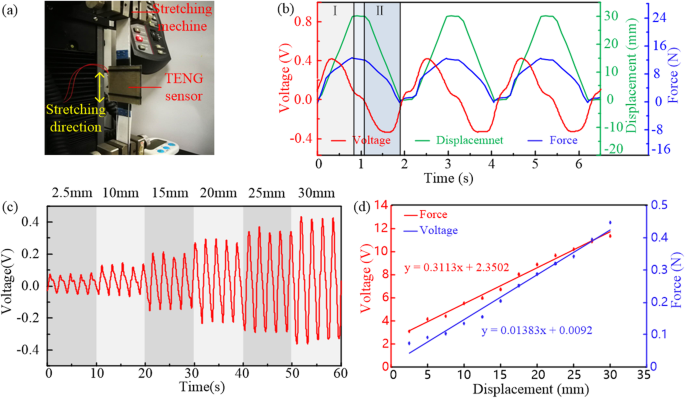
Механические испытания датчика дыхания на основе TENG. а Фотография датчика ТЭНа, закрепленного на растяжной машине. б Сигналы выходного напряжения датчика при возбуждении имеют трапециевидную форму и соответствующие временные диаграммы скользящего перемещения и силы. c Временные диаграммы выходного напряжения датчика при разных амплитудах смещения. г Пиковые значения выходного напряжения и тягового усилия как функции максимального смещения скольжения
Мониторинг дыхания
Для проверки возможности работы устройства в качестве датчика дыхания был проведен ряд контрольных тестов в реальном времени (рис. 5а), а электрические сигналы были измерены с помощью вольтметра с сопротивлением нагрузки в электрической цепи 100 МОм. . Во время процесса дыхания пояс устройства поддерживается в конформном контакте с талией пользователя, и изменение условий брюшной полости пользователя отражается периодическими возвратно-поступательными скользящими колебаниями трибопары. Когда доброволец периодически выдыхает и вдыхает, появляются сигналы выходного напряжения, включая импульсы с положительной и отрицательной амплитудами. В реальных приложениях захваченные электрические сигналы могут содержать больше информации, относящейся к процессу дыхания, то есть частоту дыхания, процессу вдоха или выдоха и т. Д. Путем иллюстрации корреляции между периодическим изменением сигналов напряжения и рабочим механизмом дыхания. датчик, точнее будет извлекать подробную информацию о дыхании из измеренных сигналов. Таким образом, мы берем один цикл дыхания из тестов в реальном времени в качестве примера, чтобы проиллюстрировать корреляцию (рис. 5b). Когда в процессе выдоха прикладывается сила, трибопара выдвигается наружу и генерирует импульс выходного напряжения с положительной амплитудой в соответствии с обнаружением процесса выдоха. Затем, соответственно, когда прилагаемая сила постепенно отменяется в процессе вдоха, трибопара скользит внутрь и генерирует импульс выходного напряжения с отрицательной амплитудой в соответствии с обнаружением процесса вдоха. На основе вышеупомянутого анализа сигналы напряжения могут быть использованы для обеспечения глубокого понимания процессов дыхания.
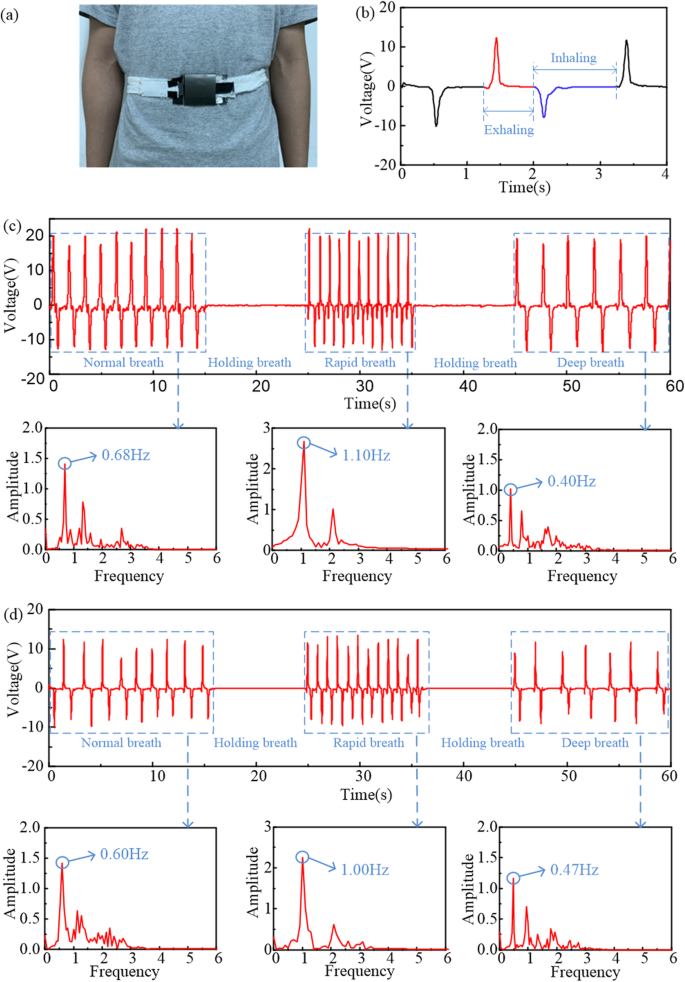
Сдвижной датчик дыхания TENG для контроля различных ритмов дыхания. а Фотография датчика TENG, надеваемого на пояс для контроля дыхания. б Соответствие сигналов выходного напряжения процессам выдоха и вдоха в одном дыхательном цикле. c , d Временные диаграммы сигналов выходного напряжения для двух добровольцев с разной талией (72,8 см для c и 98,6 см для d ) и соответствующие результаты БПФ для разных ритмов дыхания
Кроме того, два добровольца, один в возрасте 22 лет с обхватом талии 72,8 см и другой в возрасте 24 лет с обхватом талии 98,6 см, были приглашены для проверки способности умного пояса отражать специфическое дыхательное поведение разных людей. Чтобы проверить чувствительность устройства к разной частоте дыхания, предлагаемые добровольцами процессы дыхания включают три различных ритма дыхания:нормальный, быстрый и глубокий вдох. Во время процесса дыхания с разными ритмами электрические сигналы, генерируемые датчиком TENG, успешно обнаруживаются и показаны на рис. 5c и d для двух добровольцев соответственно. Сигналы напряжения повторяемы и надежны для каждого ритма, что представляет очевидную разницу в частоте дыхания в процессе дыхания. Временные характеристики выходного напряжения (рис. 5c и d) для двух добровольцев соответственно демонстрируют устойчивые изменения (постоянная частота и значение пика-спада) в процессах трех ритмов дыхания. Отраженные результатами быстрого преобразования Фурье (БПФ) на рис. 5c и d, извлеченные частоты нормального, быстрого и глубокого вдоха составляют 0,68, 1,10 и 0,40 Гц соответственно для 22-летнего добровольца и 0,60 Гц. , 1,40 и 0,47 Гц для 24-летнего; это разумная частота дыхания для здоровых взрослых [37]. Это означает, что ключевая информация о частоте дыхания может быть собрана с помощью электрических сигналов. С другой стороны, двух добровольцев в тестах просят задержать дыхание, чтобы имитировать паузу дыхания, вызванную симптомом апноэ. Соответственно, на рис. 5c и d показано, что сигналы с нулевым напряжением длятся около 10 с между двумя разными ритмами дыхания. Его можно использовать в качестве основы суждения для OSAS и дальнейшего соответствия для его диагностики и предупреждения. Эти результаты демонстрируют, что этот датчик TENG может определять не только частоту дыхания, но и симптомы апноэ.
Кроме того, добровольцы в разных состояниях провели серию тестов в реальном времени, чтобы подтвердить применимость устройства в различных повседневных действиях. Сигналы напряжения измерялись вольтметром с сопротивлением нагрузки 100 МОм в трех различных состояниях:лежа (случай I на рис. 6a), сидя (случай II на рис. 6b), стоя (случай III на рис. 6c). , и ходьба со скоростью 3 км / ч (случай IV на рис. 6d). На рис. 6а показаны полученные сигналы напряжения при лежании добровольца для имитации респираторного состояния во время сна, а на рис. 6b-d представлены зарегистрированные сигналы напряжения при сидении, стоянии и ходьбе добровольца соответственно для имитации процессов дыхания при дневных занятиях. . Все сигналы из случаев I – IV демонстрируют стабильные и продолжающиеся импульсы напряжения в темпе с изменением окружности живота при дыхании, которые совпадают с реальными процессами вдоха и выдоха. И частота дыхания соответственно определяется как 0,54 Гц для случая I, 0,52 Гц для случая II, 0,72 Гц для случая III и 0,65 Гц для случая IV. Стоит отметить, что в форме сигнала во время ходьбы на рис. 6d присутствуют некоторые дрожания, но функция мониторинга ритма дыхания по-прежнему достигается. Тесты в четырех случаях демонстрируют возможность использования датчика дыхания в качестве носимого устройства для мониторинга дыхания в режиме реального времени при различных видах деятельности в повседневной жизни. Кроме того, мы провели длительный непрерывный мониторинг дыхания в течение 180 с, и обнаруженные сигналы представлены в Дополнительном файле 1:Рисунок S1. The time histories of the output voltage exhibit stable alteration with the breathing processes during the tests, which demonstrate the stability of the TENG sensor for long-time monitoring in practical applications.

The TENG sensor for real-time respiration monitoring in different daily activities. The captured voltage signals and the corresponding testing photographs in processes of respiration monitoring when volunteer is (a ) lying, (b ) sitting, (c ) standing, and (d ) walking at a speed of 3 km/h
To further improve the portability of the device as a wearable respiration sensor, a wireless transmission system was designed for the exhibition of the breathing information on a mobile electronic equipment. Specifically, a real-time monitoring test equipped with the wireless transmission system proposed in Fig. 1b was carried out and the electrical signals generated by the TENG sensor were wirelessly transmitted and displayed on a cell phone. Figure 7a shows the actual setup of the wireless transmission system and Fig. 7b shows the signal waveforms containing breathing information displayed on the phone via the wireless transmission system. The measured respiratory information of the volunteer in Fig. 7b have been further processed on a PC and shown in Fig. 7c for better viewing. The depicted waveforms in Fig. 7c suggest that the respiratory rate is about 0.625 Hz. And the exhalation and the inhalation stages of the breathing process are identified and marked in Fig. 7c, which indicates the perfect reflection of the electric signals displayed on the phone to the actual respiratory status and the reliability and practicality of the wireless transmission system. To further demonstrate the accuracy of the wireless signals, voltmeter signals (with electrical load resistance of 10 MΩ) after TENG and wireless signals after wireless system were captured in the same breathing test and compared in Additional file 1:Figure S2. It is worth to be mentioned that the amplitude of the wireless signals is not the true value of the output voltage of the TENG sensor, but being processed proportionally. On the one hand, the signal width of the wireless signals is much wider than the voltmeter signals, which can be attributed to a comprehensive outcome of the larger input impedance of voltage follower (100 TΩ) in the wireless transmission chip, the existing load loss of the circuit and the low sampling rate which make the signals distorted slightly. On the other hand, though the waveform and the peak value are changed after the wireless system, the information about the breathing cycle delivered by the wireless signals coincides well with that of the voltmeter signals, which means that the respiratory rates can be correctly reflected by the signals obtained from the wireless transmission chip.

Real-time respiration monitoring via the TENG sensor with the wireless transmission system. а Photograph of the actual setup of the wireless transmission system. б Photograph of volunteer’s real-time breathing signals displayed on a mobile phone. c The respiratory waveform depicted with the data stored by the wireless transmission system
Выводы
In summary, we have designed and fabricated a waist-wearable wireless respiration sensor to monitor real-time respiratory status of humans in daily life and to transmit the breathing information to a mobile cell via a wireless transmission system. We furtherly illustrated its working mechanism in detail that it senses the variation of the abdominal circumference while breathing and output electrical signals containing rhythm information of the respiratory processes. In this study, theoretical analyses were performed to predict the output signals of the TENG and validate the possibility of the TENG to work as a respiration sensor. It was also demonstrated by a mechanical test that the sensor can be easily driven by a sliding displacement with an amplitude of 2.5 mm, which makes it feasible for use as a wearable sensor. To validate the applicability in reality, we carried out a series of tests by two volunteers to investigate the feasibility, accuracy, and sensitivity of the device to different individuals, different breathing rhythms, and different active states. The device was demonstrated applicable for not only the detection of apnea symptom but also the real-time monitoring of breath. Lastly, the wireless transmission system of the sensor was also proved to be efficient in wireless electrical signal transmission. Results stated above have shown the potential of the proposed sensor as a smart wearable respiration sensor and the household healthcare monitoring system comprehensively.
Доступность данных и материалов
The data and materials used are included in the manuscript.
Сокращения
- ADC:
-
Analog digital converter
- БПФ:
-
Быстрое преобразование Фурье
- OSAS:
-
Obstructive sleep apnea syndrome
- PTFE:
-
Polytetrafluoroethylene
- TENG:
-
Трибоэлектрический наногенератор
Наноматериалы
- Переосмысление плана игры для мониторинга сети
- Лучшие практики для синтетического мониторинга
- Проверенная система определения местоположения в реальном времени (RTLS) для здравоохранения
- 5 типов тегов, доступных для систем определения местоположения в реальном времени
- Сделай сам:мониторинг и регулирование температуры для домашнего пивоварения
- Подходит ли вам система непрерывного мониторинга?
- «Настал сезон для торговли в реальном времени
- 5 причин выбрать IoT для удаленного мониторинга грузов
- Универсальный тест для мониторинга COVID-19
- Биосенсор обеспечивает мониторинг кислорода в реальном времени для органов-на-чипе