


Интеграция ROS2 + DDS:при слиянии экосистем | RTI

Как было объявлено в июле 2018 г., второй выпуск ROS2, получившая название Bouncy Bolson, теперь доступна для загрузки с веб-сайта ROS2 для платформ Intel Linux, Windows и iOS.
Если это звучит незнакомо, ROS (Robot Operating System) - это платформа с открытым исходным кодом и набор инструментов для создания роботизированных систем, и он представлен в двух основных вариантах:ROS - оригинал. исследовательская версия с использованием Python и XML, а также ROS2 - версия с повышенной производительностью, использующая DDS в качестве среды подключения.
О ROS2 Bouncy Bolson
Версия ‘Bouncy’ является особенной, поскольку она включает RTI Connext DDS в двоичный дистрибутив по некоммерческой лицензии. DDS профессионального уровня теперь является бесплатным вариантом для исследователей, оценщиков и ученых, использующих ROS2 для приложений робототехники.
Это означает, что экосистема инструментов и сервисов DDS доступна всем пользователям ROS2 благодаря совместимости на основе стандартов, присущей DDS, включая:
- Консоль администратора RTI:удобный инструмент для диагностики проблем с подключением к системе.
- RTI System Monitor:лучший инструмент для настройки и оптимизации производительности системы.
- Служба записи RTI: широкополосная, длительная запись и воспроизведение тематических данных из вашей системы.
- Служба маршрутизации RTI: готовое решение, которое действует как архитектурный мост / шлюз.
Давайте посмотрим, как консоль администратора RTI может упростить диагностику и понимание проблем подключения ROS2. Недавно я собрал источник данных LiDAR для ROS2, и моя первоначальная попытка отобразить данные с помощью RViz привела к отсутствию данных. Терминал для RViz не выдавал много полезных сообщений:

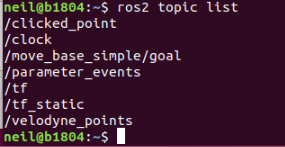 Меня интересует тема «/ velodyne_points»:
Меня интересует тема «/ velodyne_points»: Предоставляет ли издатель «/ velodyne_points» какие-либо данные ?:
Предоставляет ли издатель «/ velodyne_points» какие-либо данные ?: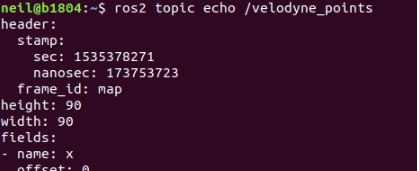 Да. . . так почему же данные не отображаются в RViz?
Да. . . так почему же данные не отображаются в RViz? Консоль администратора
Давайте попробуем диагностировать эту проблему с помощью консоли администратора RTI, которая удобно доступна в средстве запуска RTI:

С момента запуска консоли администратора она сообщает мне, что есть проблема среди участников сети DDS (обратите внимание на красный индикатор X-box):
 Расширение «Домена 0» и выделение моей интересующей темы (/ velodyne_points) сразу показывает причину проблемы - несоответствие QoS:
Расширение «Домена 0» и выделение моей интересующей темы (/ velodyne_points) сразу показывает причину проблемы - несоответствие QoS: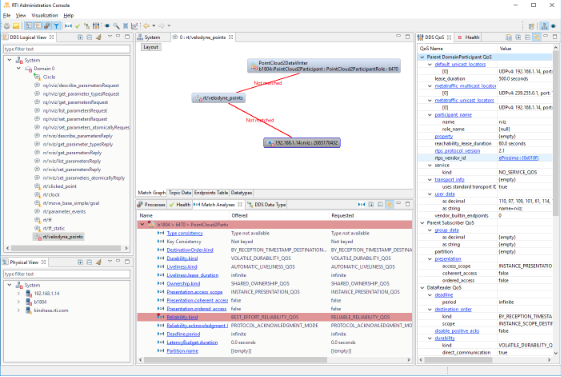 Мой издатель предлагает надежность Best Effort, но подписчик RViz требует «Надежное» соединение. Вместо того, чтобы позволить этому несоответствию продолжаться, DDS отказывает в соединении и предотвращает то, чтобы несоответствие продолжало оставаться незамеченным.
Мой издатель предлагает надежность Best Effort, но подписчик RViz требует «Надежное» соединение. Вместо того, чтобы позволить этому несоответствию продолжаться, DDS отказывает в соединении и предотвращает то, чтобы несоответствие продолжало оставаться незамеченным. Это несоответствие QoS было немедленно обнаружено консолью администратора вместе с деталями все остальные участники этой сети ROS2 DDS, включая все обычно скрытые внутренние темы ROS2. С первого взгляда я могу определить, что:
- В журнале есть записи об ошибках - рассмотрим их позже.
- Есть несколько тем «Только для писателей» и «Только для чтения». Это темы, которые могут публиковать или подписываться на тему, но не имеют в настоящее время дополнительных подписчиков или издателей.
- В этой системе используется сочетание слоев RMW от разных поставщиков DDS. Это не является проблемой. DDS был разработан для обеспечения совместимости с различными поставщиками.
- При работе со слоем Connext RMW информация о типе кода включается в трафик обнаружения DDS, и ее можно легко просмотреть в консоли администратора:
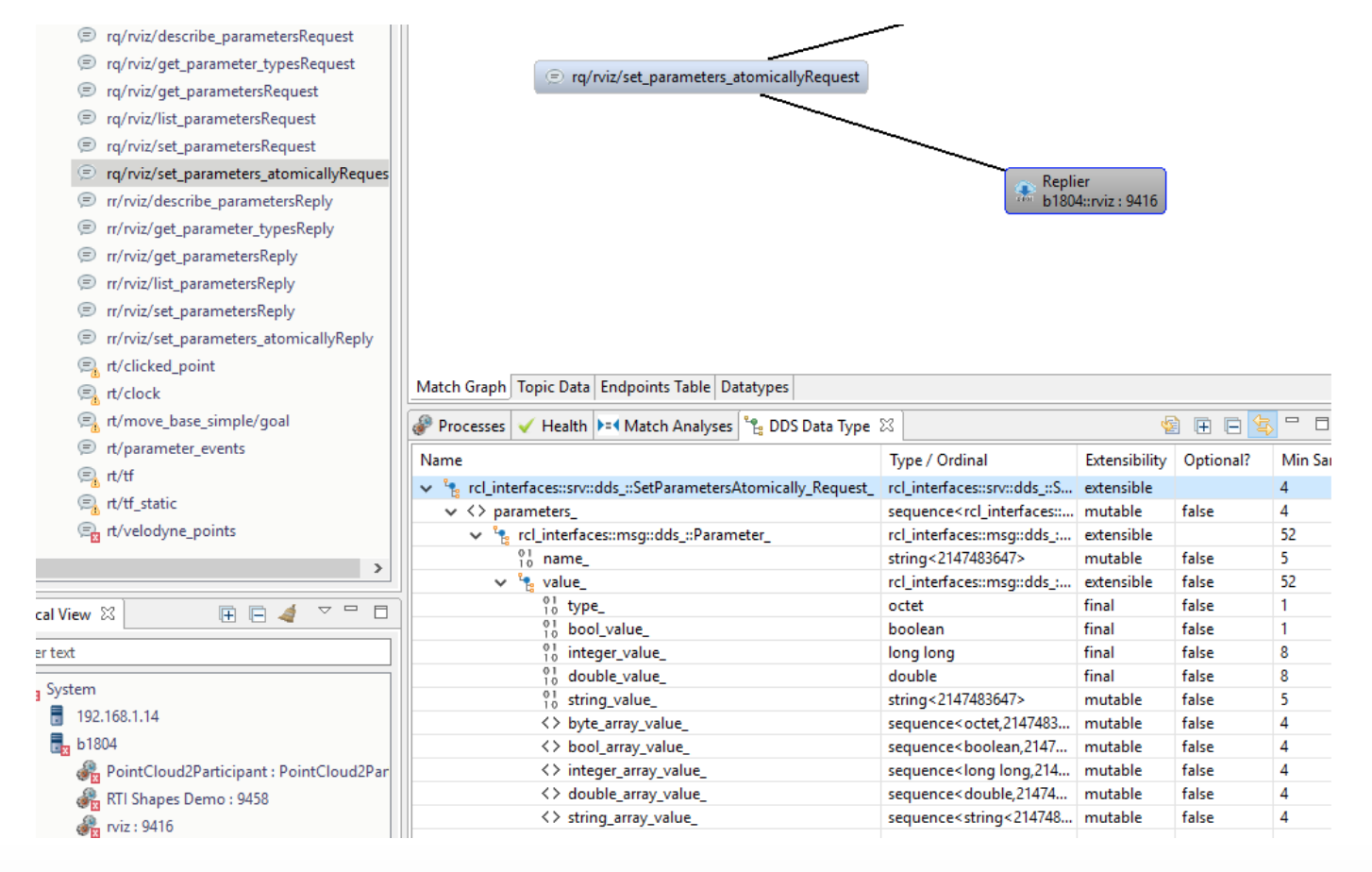
При использовании других слоев RMW эта информация подавляется.
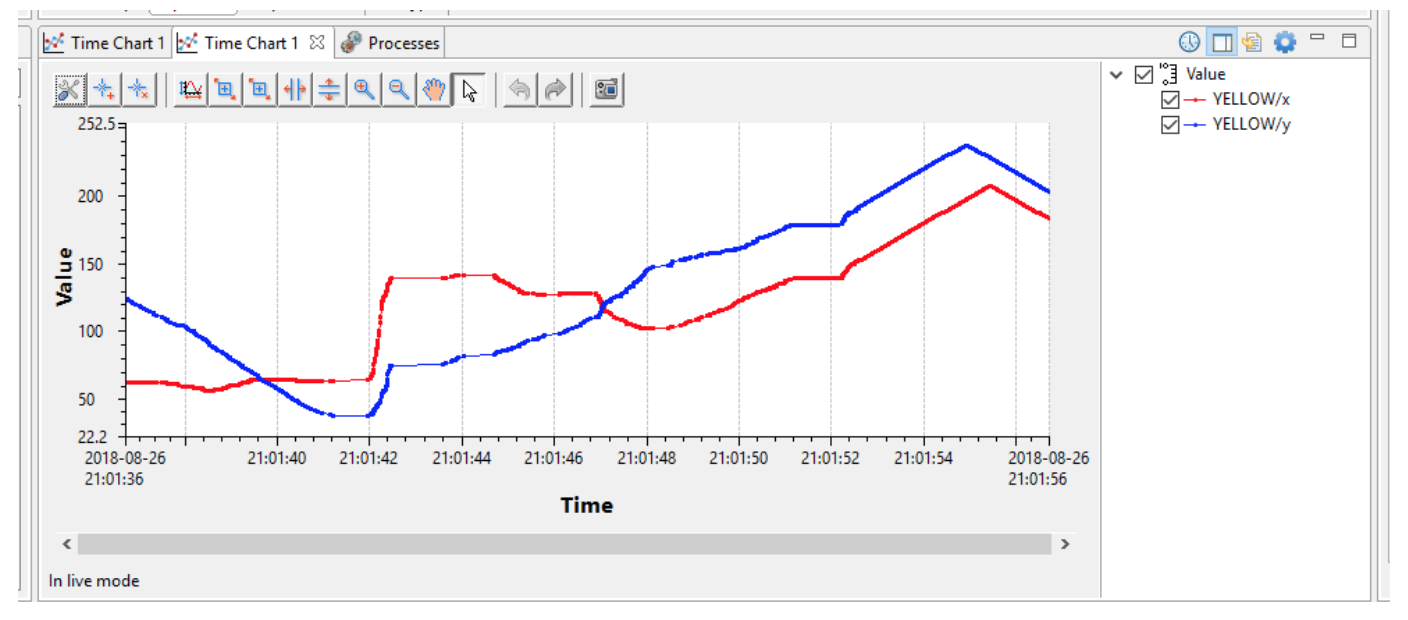
Консоль администратора также может подписаться на темы данных и распечатать или визуализировать их значения данных:
С помощью консоли администратора я смог выявить несоответствие QoS, которое препятствовало передаче данных, и запустить систему за несколько минут.
Прочитайте другие сообщения в блоге, в которых подчеркивается мощь объединенной экосистемы ROS2 / DDS - для расширения, диагностики и оптимизации системы ROS / ROS2, а также для обеспечения улучшенной 3D-визуализации для чистых систем DDS .
ROS2 + DDS:Полевое руководство по взаимодействию
ROS2 + DDS Играй снова
ROS 2 и DDS:совместимость с робототехникой нового поколения
Интернет вещей
- Open DDS против программного обеспечения RTI DDS
- Тестирование программного обеспечения в РТИ
- Connext 6:уже доступно!
- ROS2 + DDS:сыграйте снова
- ROS2 + DDS:Полевое руководство по взаимодействию
- Объявление о последнем тесте RTI Perftest для Connext DDS
- Как интегрировать Qt и DDS в приложение IoT
- Адаптивная платформа AUTOSAR 18.03:теперь с DDS!
- Вот почему все используют RTI Connext DDS для автономных транспортных средств
- Интеграция 5G в системы IIoT ускоряет внедрение Индустрии 4.0