


Практический пример:как Kane Robotics добилась орбитальной полировки с помощью RoboDK
Обработка поверхностей с помощью робота — это приложение, о котором вы, возможно, раньше не задумывались.
Вы можете задаться вопросом:существует ли хороший концевой эффектор для выполнения шлифовки или полировки с помощью робота? И насколько легко запрограммировать робота с таким исполнительным органом?
Но команда Kane Robotics нашла способ легко интегрировать своего робота и новый орбитальный шлифовальный концевой эффектор с RoboDK.
Посмотрим, как они это сделали!
Шлифовка и полировка — это задачи, которые традиционно сложно автоматизировать. В прошлом вам приходилось либо вкладывать большие средства в автоматический шлифовальный станок — тип, который займет половину места в вашей мастерской и стоит небольшое состояние, — либо вам приходилось выполнять эту задачу вручную.
Проблема ручной обработки поверхности заключается в том, что это трудоемкая, физически тяжелая работа и обеспечивает непостоянное качество. Похоже, идеальная задача для робота!
В последние годы обработка поверхности с помощью промышленного робота стала жизнеспособным вариантом. Добавив датчик силы к концевому эффектору робота, вы можете использовать контроль силы для обеспечения стабильной обработки поверхности с помощью орбитального шлифовального инструмента.
В результате промышленные роботы теперь могут использоваться для выполнения задач по отделке поверхностей, требующих высокой степени согласованности, таких как полировка лопастей воздушного винта для самолетов…
… именно это и сделала команда Kane Robotics.
Представляем… Kane Robotics
Kane Robotics — компания по интеграции систем автоматизации, базирующаяся в Калифорнии, США. В основном они обслуживают авиационный и аэрокосмический секторы и предоставляют решения по автоматизации для производителей с большим ассортиментом и низким уровнем производства.
Они описывают миссию своей компании следующим образом:"освободить квалифицированных специалистов аэрокосмической отрасли от трудоемких, повторяющихся производственных задач за счет использования инновационных, недорогих и гибких решений для автоматизации".
В частности, они помогают производителям аэрокосмической техники в таких областях, как шлифование, шлифование, отделка, нанесение эпоксидной смолы, сверление и обслуживание станков.
Проект компании включал полировку лопасти воздушного винта для самолета.
Проект:полировка лопастей пропеллера
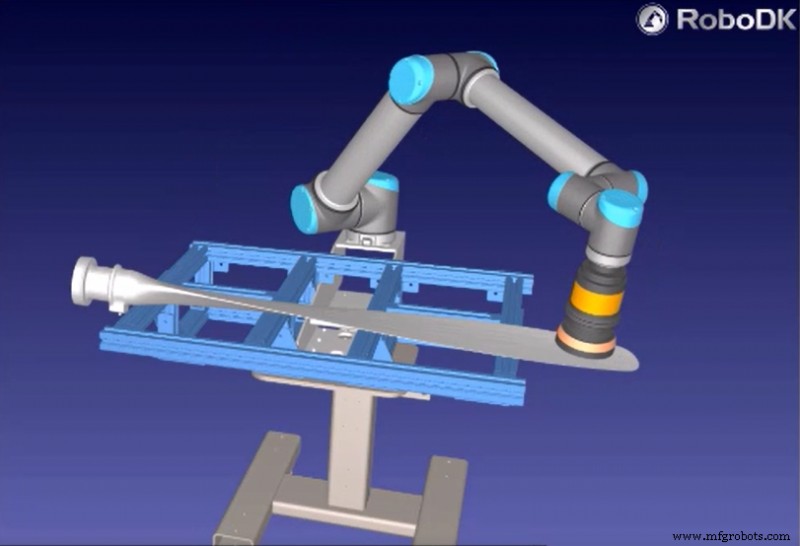
<управление автозапуском видео отключено src="https://robodk.com/blog/wp-content/uploads/2021/08/Propeller-Polishing.mp4">Лопасти гребного винта представляют собой тонкую и впечатляющую конструкцию. Они являются основным средством, с помощью которого самолет достигает своей тяги в воздухе. Любая ошибка в их производственном процессе может привести к неэффективности двигателя самолета или, в худшем случае, к катастрофе.
Этап полировки жизненно важен в производстве самолетов. Плохая обработка поверхности может вызвать ненужное сопротивление в воздухе и привести к тому, что самолет будет расходовать больше топлива, чем необходимо.
Кроме того, Федеральное авиационное управление (FAA) настоятельно не рекомендует полировать винт после его изготовления, так как это может привести к повреждению тонкого защитного покрытия, нанесенного на поверхность лопасти. В результате этап полировки во время производства является последним моментом для получения столь важного качества поверхности.
Команда Kane Robotics приступила к разработке приложения для полировки с использованием робота и нового типа орбитального шлифовального концевого эффектора, специально разработанного для роботизированной обработки поверхности.
Робот должен был аккуратно полировать лопасть винта с помощью этого концевого зажима.

Интеграция роботизированной орбитальной шлифовальной машины с RoboDK
Частично мотивация команды для участия в этом проекте заключалась в том, чтобы протестировать новый орбитальный шлифовальный концевой эффектор, который они использовали.
Общая проблема с роботизированной обработкой поверхностей заключается в том, что она требует контроля усилия. Когда мы шлифуем или полируем вручную, мы можем точно контролировать усилие, прилагаемое финишным инструментом. С роботом наиболее распространенный способ сделать это — добавить в инструмент датчик силы и запрограммировать активное соответствие. Это может быть сложно запрограммировать.
Конечный эффектор, который использовала Kane Robotics, упрощает развертывание роботизированной отделки поверхностей, чем это было в прошлом, благодаря включению соответствия в сам инструмент.
Соответствующая требованиям орбитальная шлифовальная машина
Рассматриваемым конечным эффектором была орбитальная шлифовальная машина AOV-10 от ATI, также доступная как компонент UR+.
Этот новый инструмент специально разработан для облегчения роботизированного шлифования. Он включает в себя пневматическую податливость оси орбитального шлифовального инструмента, что дает роботу возможность реагировать на незначительные изменения поверхности заготовки.

Как объяснил Алан Хайкен, главный операционный директор Kane Robotics:
Одно из преимуществ использования RoboDK с такими новыми опциями End of Arm Tooling (EOAT) заключается в том, что очень легко добавить новый концевой эффектор в программу, как мы объясняли в нашей предыдущей статье «5-минутное руководство по использованию любого конца». Эффектор с RoboDK.
Настройка их аппаратного и программного обеспечения
Установка, использованная командой Kane Robotics, была достаточно простой благодаря шлифовальному инструменту ATI.
Основными компонентами их установки были:
- Совместный робот Universal Robotics.
- Шлифовальный инструмент ATI AOV-10.
- Стол, на котором была закреплена лопасть винта.
- RoboDK для автономного программирования.
Без этой конкретной орбитальной шлифовальной машины команде, возможно, пришлось бы интегрировать внешний датчик силы. Это усложнило бы как настройку оборудования, так и программирование робота.
С RoboDK их программирование было простым.
Почему Kane Robotics использовала RoboDK?
RoboDK позволил команде быстро и легко запустить приложение.
Программирование состояло только из действий по планированию пути, которые можно выполнить в RoboDK всего за несколько шагов.
Вот что главный операционный директор Алан Хикен сказал о RoboDK:
Когда его спросили, почему они использовали RoboDK, он просто ответил:«Если у вас есть данные САПР, почему бы вам их не использовать?»
Мы вряд ли можем спорить!
Какие приложения вы могли бы реализовать с помощью RoboDK? Сообщите нам в комментариях ниже или присоединитесь к обсуждению в LinkedIn, Twitter, Facebook, Instagram или на форуме RoboDK.
Промышленный робот
- Как уменьшить количество отходов с помощью автономных роботов
- Как создать вариационный автоэнкодер с TensorFlow
- Что такое электрополировка и электролитическая полировка | Услуги Junying по отделке металлических поверхносте…
- Уход за станками с ЧПУ? Вот как это сделать с помощью кобота
- Как справиться с царапинами на зеркале из нержавеющей стали
- Бесплатное обучение роботов с RoboDK
- Практический пример:улучшение рабочего процесса аддитивного производства
- Как один инженер добился беспылевой роботизированной гравировки с помощью RoboDK
- Как начать программирование роботов Yaskawa
- Как начать работу с RoboDK для Raspberry Pi