


Как настроить GRBL и управлять станком с ЧПУ с помощью Arduino
<основной класс="главный сайт" id="главный">
Если вы думаете или находитесь в процессе изготовления собственного станка с ЧПУ, то, скорее всего, вы встретитесь с термином GRBL. Итак, в этом уроке мы узнаем, что такое GRBL, как установить и как использовать его для управления станком с ЧПУ на базе Arduino.
Кроме того, мы узнаем, как использовать Universal G-code Sender, популярное программное обеспечение контроллера GRBL с открытым исходным кодом.
Что такое GRBL?
GRBL — это программное обеспечение или прошивка с открытым исходным кодом, которая обеспечивает управление движением для станков с ЧПУ. Мы можем легко установить прошивку GRBL на Arduino и мгновенно получить недорогой высокопроизводительный контроллер ЧПУ. GRBL использует G-код в качестве входных данных и выводит управление движением через Arduino.
Для лучшего понимания мы можем взглянуть на следующую диаграмму:
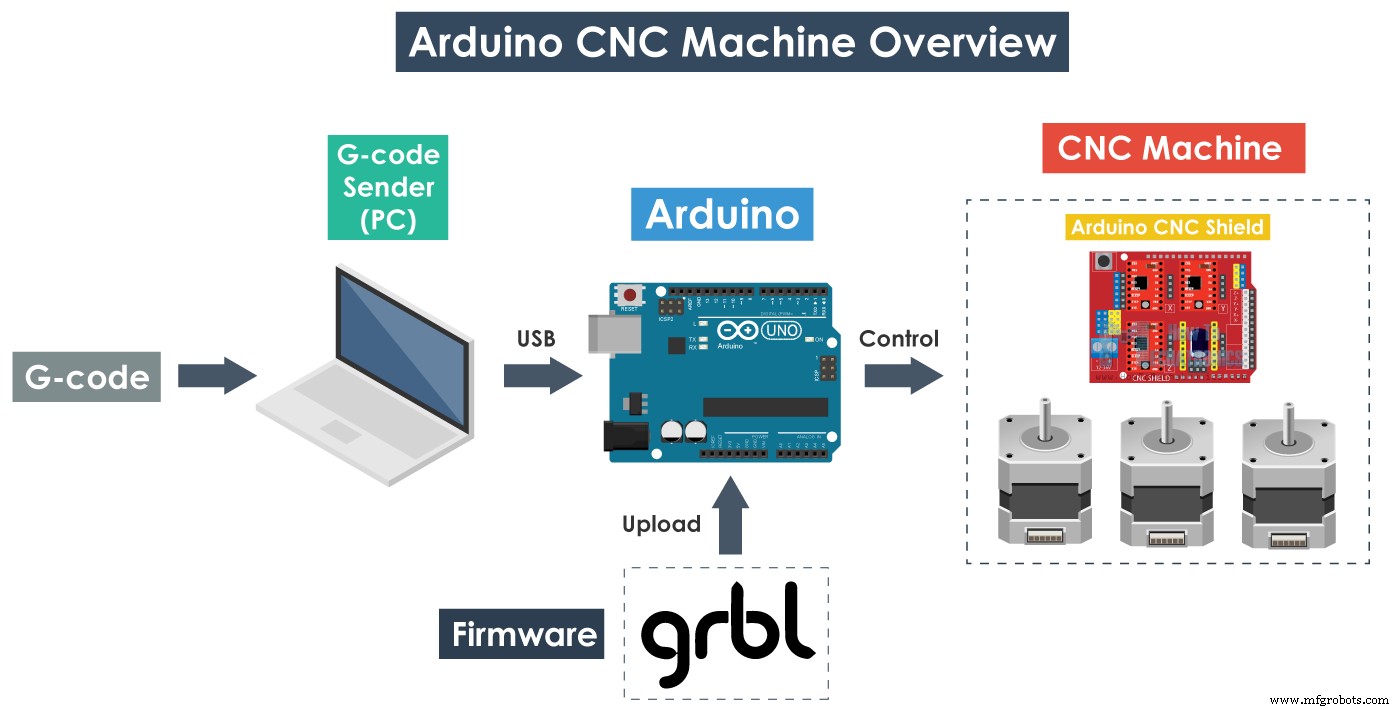
Из диаграммы видно, какое место GRBL занимает в «общей картине» принципа работы станка с ЧПУ. Это прошивка, которую нам нужно установить или загрузить в Arduino, чтобы она могла управлять шаговыми двигателями станка с ЧПУ. Другими словами, функция встроенного ПО GRBL заключается в преобразовании G-кода в движение двигателя.
Необходимое оборудование
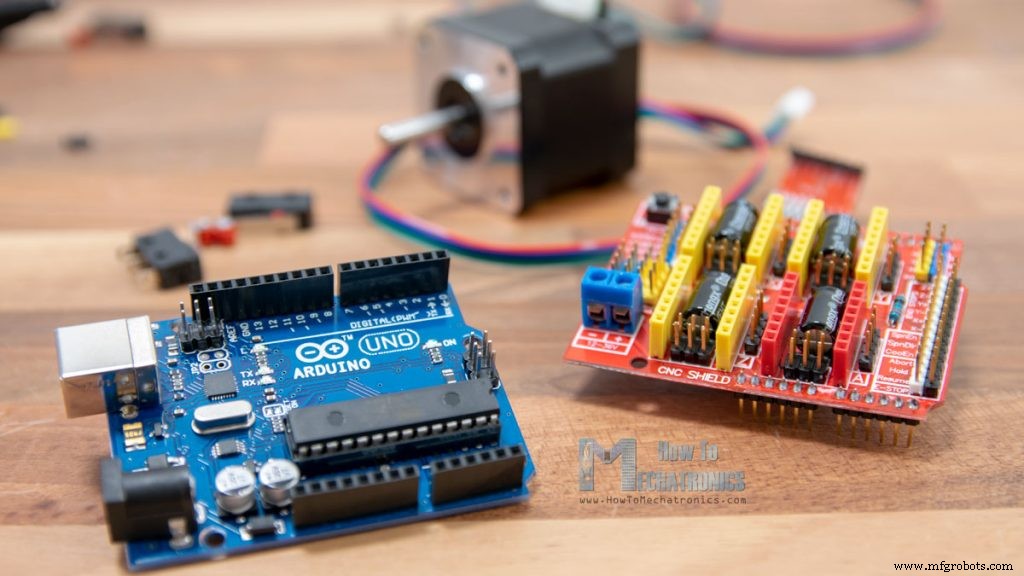
- Ардуино – Как мы уже говорили, для установки GRBL нам понадобится Arduino. В частности, нам нужна плата Arduino на базе Atmega 328, а это означает, что мы можем использовать либо Arduino UNO, либо Nano.
- Шаговые двигатели – Очевидно, шаговые двигатели обеспечивают движение станка.
- Драйверы – Для управления шаговыми двигателями нам нужны драйверы, а для небольших станков с ЧПУ (использующих шаговые двигатели NEMA 14 или 17) обычно выбирают драйверы A4988 или DRV8825.
- Щит Arduino с ЧПУ – Для подключения драйверов шаговых двигателей к Arduino проще всего использовать Arduino CNC Shield. Он использует все контакты Arduino и обеспечивает простой способ подключения всего, шаговых двигателей, шпинделя/лазера, концевых выключателей, охлаждающего вентилятора и т. д.
Обратите внимание, что это только основные электронные компоненты, необходимые для понимания работы станка с ЧПУ.
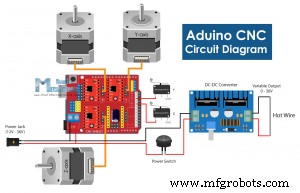
На самом деле, в качестве примера того, как все должно быть связано, мы можем взглянуть на мой самодельный станок для резки пенопласта с ЧПУ.
Вы можете проверить и получить основные электронные компоненты, необходимые для сборки этого станка с ЧПУ, здесь:
- Шаговый двигатель — NEMA 17………………
- Драйвер шагового двигателя A4988…………………..…
- Arduino CNC Shield ………………………. Амазонка / Бангуд / AliExpress
- Ардуино Уно……………………………………
Основным инструментом этого станка с ЧПУ является горячая проволока, которая может легко расплавить или прорезать пенопласт и придать ему любую форму. Для получения более подробной информации о том, как я сделал машину и как все работает, вы можете проверить конкретный учебник.

Тем не менее, мы будем использовать этот станок в качестве примера в этой статье, потому что тот же принцип работы применим и к любому другому станку с ЧПУ, будь то фрезерный или лазерный.
Как установить GRBL
Во-первых, чтобы иметь возможность установить или загрузить GRBL в Arduino, нам нужна Arduino IDE.
Затем мы можем загрузить прошивку GRBL с github.com.
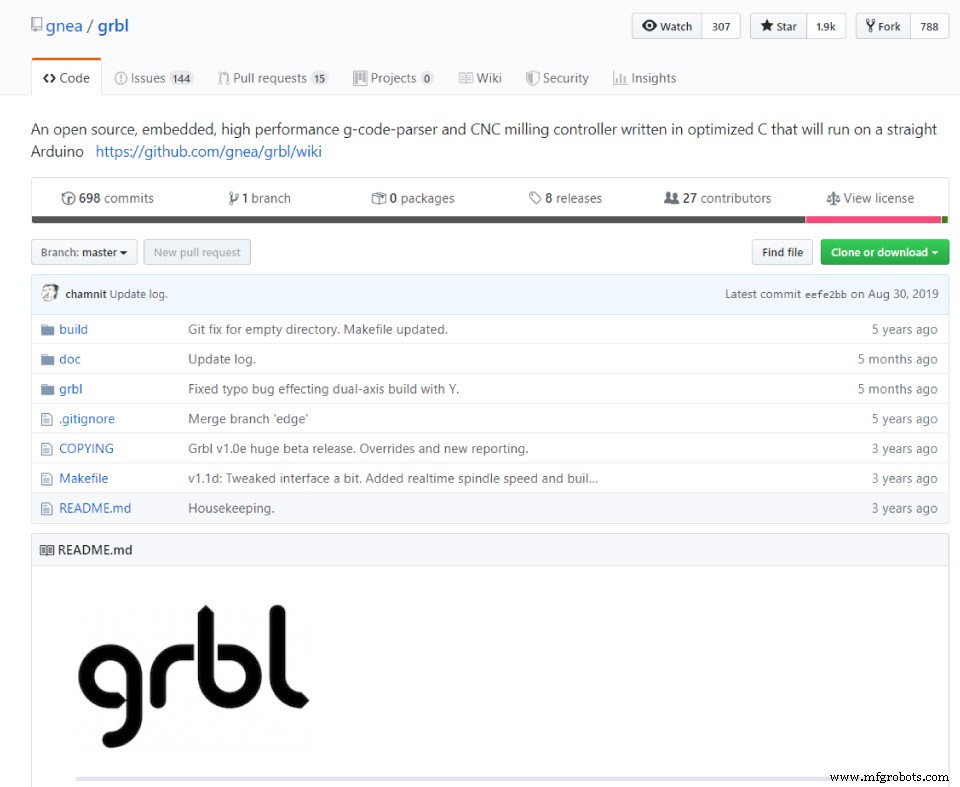
Загрузите его как ZIP-файл и выполните следующие действия:
- Откройте файл grbl-master.zip и извлеките файлы.
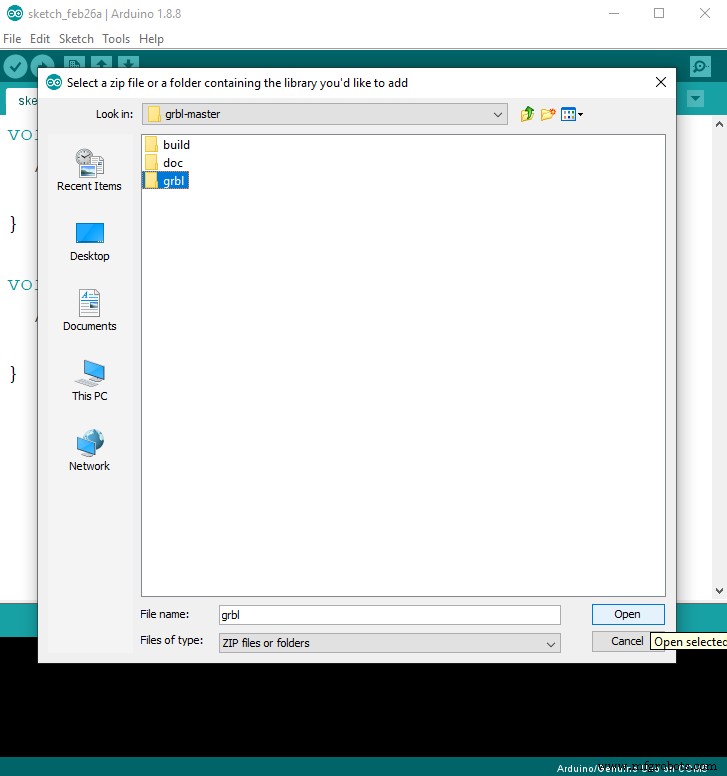
- Откройте среду разработки Arduino, перейдите в меню «Скетч»> «Включить библиотеку»> «Добавить библиотеку .ZIP…».
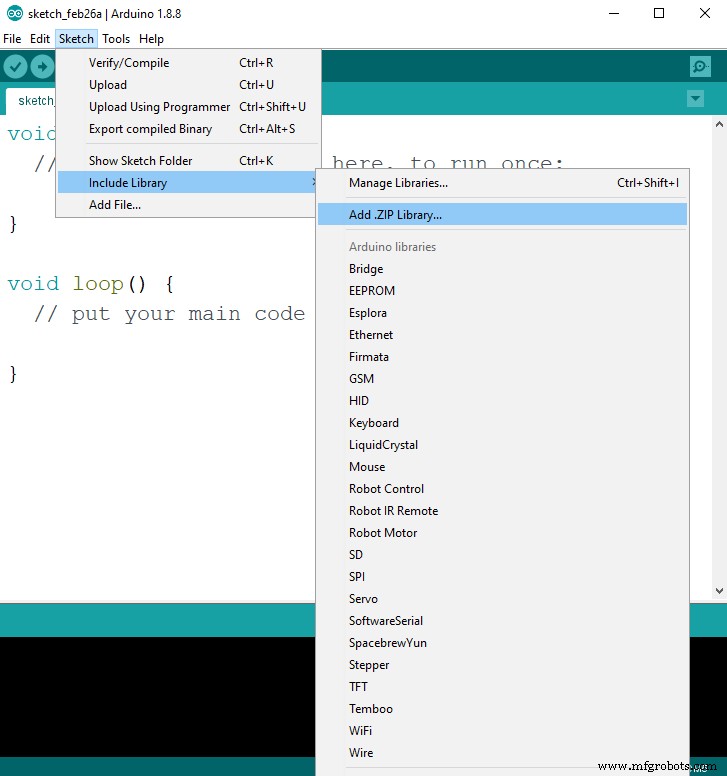
- Перейдите к извлеченной папке «grbl-master», выберите там папку «grbl» и нажмите «Открыть файл». Теперь нам нужно использовать GRBL как библиотеку Arduino.
- Затем перейдите в меню «Файл»> «Примеры»> grbl> grblUpload. Откроется новый скетч, и нам нужно загрузить его на плату Arduino. Код может выглядеть странно, так как состоит всего из одной строки, но не беспокойтесь, все происходит в фоновом режиме в библиотеке. Итак, нам просто нужно выбрать плату Arduino, COM-порт и нажать кнопку загрузки, и все готово.
Конфигурация GRBL
На этом этапе мы должны настроить или настроить GRBL для нашей машины. Мы можем сделать это через последовательный монитор Arduino IDE. Как только мы откроем Serial Monitor, мы получим сообщение вроде «Grbl 1.1h [‘$’ for help]». Если вы не видите это сообщение, убедитесь, что вы изменили скорость передачи на 115200.
Если мы введем «$$», мы получим список команд или текущих настроек, и они выглядят примерно так:
100$=250.000 (x, шаг/мм)
101$=250.000 (y, шаг/мм)
102$=3200.000 (z, шаг/мм)
110$=500.000(x максимальная ставка, мм/мин)
$111=500.000 (y макс. скорость, мм/мин)
$112=500.000 (z макс. скорость, мм/мин)
$120=10.000 (x ускорение, мм/сек) ^2)
121$=10 000 (ускорение по оси y, мм/с^2)
122$=10 000 (ускорение по z, мм/с^2)
Все эти команды могут быть или должны быть скорректированы в соответствии с нашим станком с ЧПУ. Например, с помощью первой команды $100=250 000 (x, шаг/мм) мы можем настроить количество шагов на миллиметр станка или указать, сколько шагов должен сделать двигатель, чтобы наша ось X переместилась на 1 мм.
Тем не менее, я бы предложил оставить эти настройки как есть. Есть более простой способ настроить их в соответствии с нашей машиной с помощью программного обеспечения контроллера, о котором мы расскажем в следующем разделе.
Контроллер GRBL
Итак, после того, как мы установили прошивку GRBL, теперь наша Arduino умеет читать G-код и управлять станком с ЧПУ в соответствии с ним. Однако для того, чтобы отправить G-код на Arduino, нам нужен какой-то интерфейс или программное обеспечение контроллера, которое скажет Arduino, что делать. На самом деле для этой цели существует множество как открытых, так и коммерческих программ. Конечно, мы будем придерживаться открытого исходного кода, поэтому в качестве примера возьмем Univarsal G-code Sender.

Как использовать универсальный отправитель G-кода
В этом примере я буду использовать версию платформы 2.0. Как только мы загрузим его, нам нужно распаковать zip-файл, перейти в папку «bin» и открыть любой из исполняемых файлов «ugsplatfrom». На самом деле это программа JAVA, поэтому, чтобы иметь возможность запускать эту программу, сначала нам нужно установить JAVA Runtime Environment.
После того, как мы откроем универсальный отправитель G-кода, сначала нам нужно настроить машину или настроить параметры GRBL, показанные ранее. Для этого мы воспользуемся мастером настройки UGS, который гораздо удобнее, чем вручную вводить команды через последовательный монитор Arduino IDE.
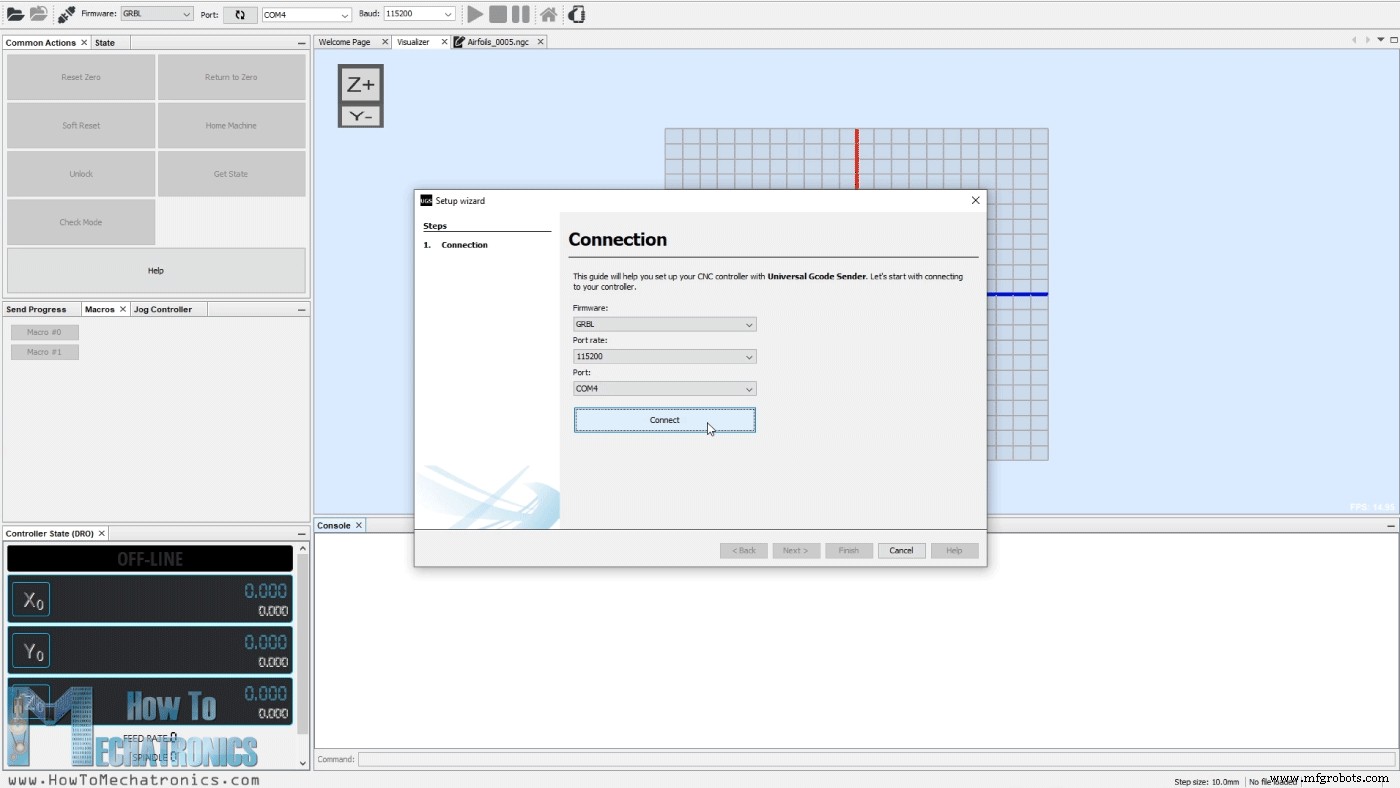
Первым шагом здесь является выбор скорости передачи данных, которая должна быть 115200, и порта, к которому подключена наша Arduino. Как только мы подключим универсальный отправитель G-кода к Arduino, на следующем шаге мы сможем проверить направление движения двигателей.
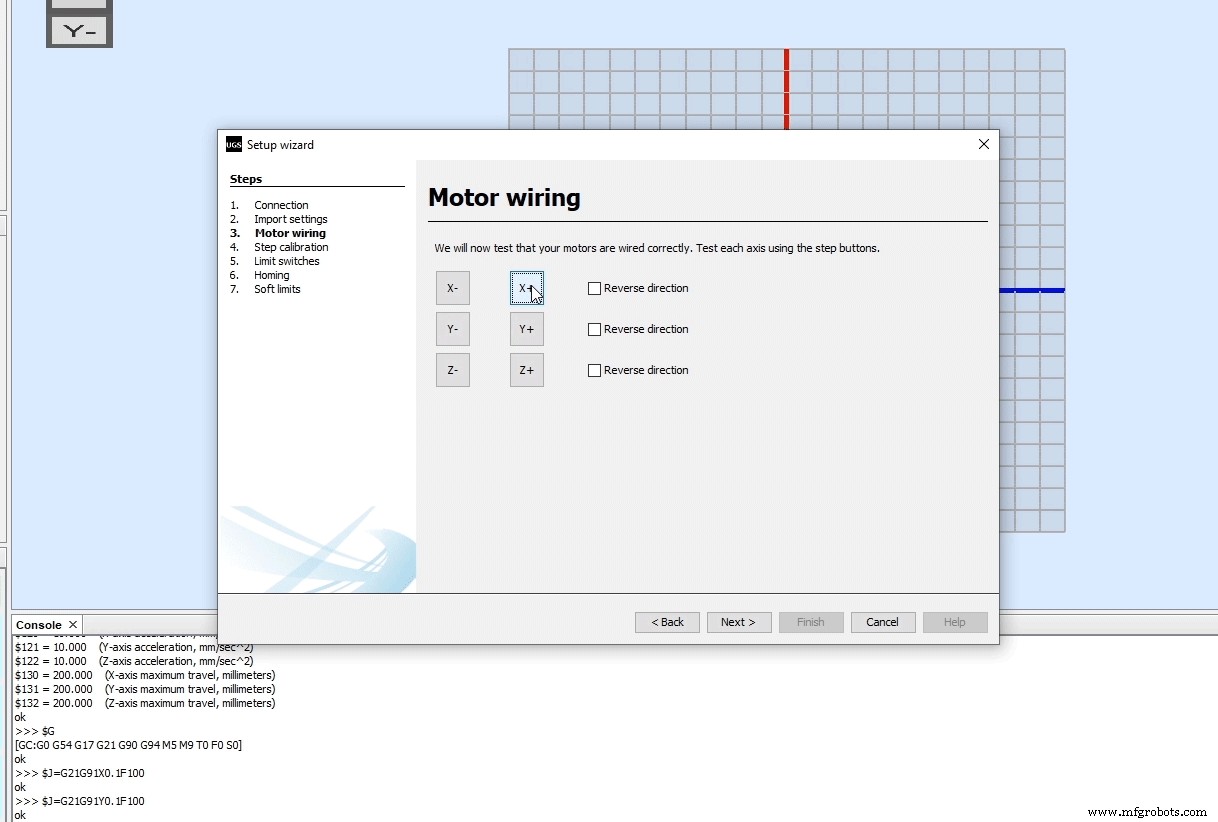
При необходимости мы можем изменить направление с помощью мастера или вручную переключив соединение двигателя на Arduino CNC Shield.
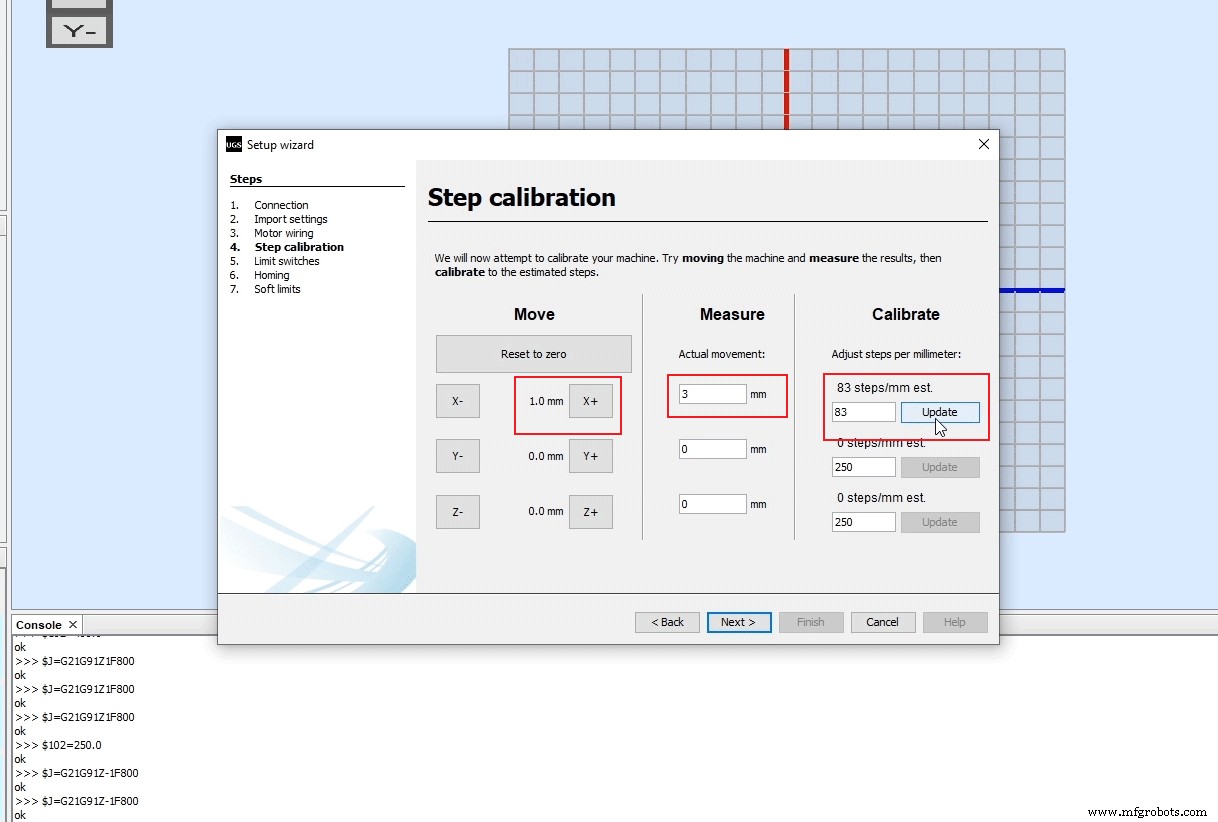
На следующем шаге мы можем настроить параметр шагов/мм, о котором мы упоминали ранее. Здесь гораздо проще понять, как его настроить, потому что мастер настройки рассчитает и подскажет, до какого значения нам следует обновить параметр.
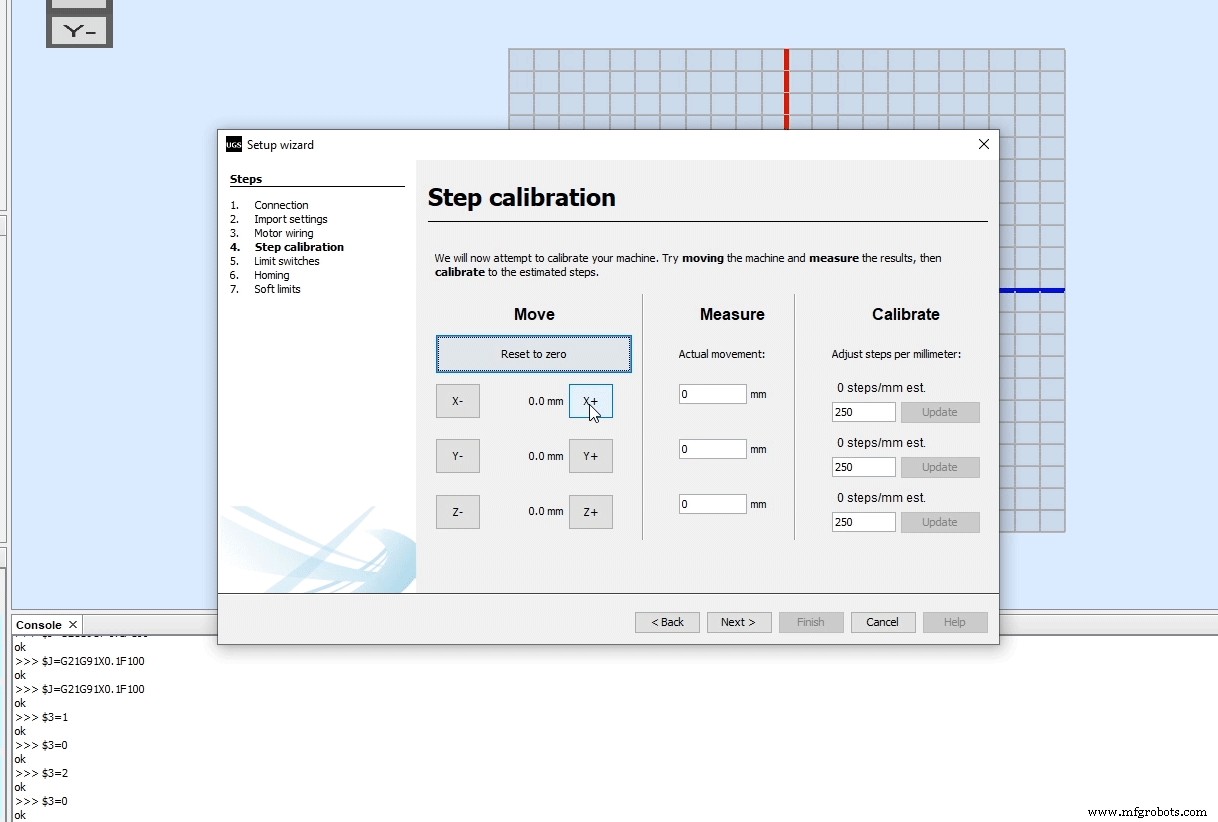
Значение по умолчанию — 250 шагов/мм. Это означает, что если мы нажмем кнопку перемещения «х+», мотор сделает 250 шагов. Теперь, в зависимости от количества физических шагов двигателя, выбранного шагового разрешения и типа трансмиссии, машина будет перемещаться на некоторое расстояние. Используя линейку, мы можем измерить фактическое движение машины и ввести это значение в поле «Фактическое движение». На основании этого мастер рассчитает и сообщит нам, на какое значение следует изменить параметр «шаги/мм».
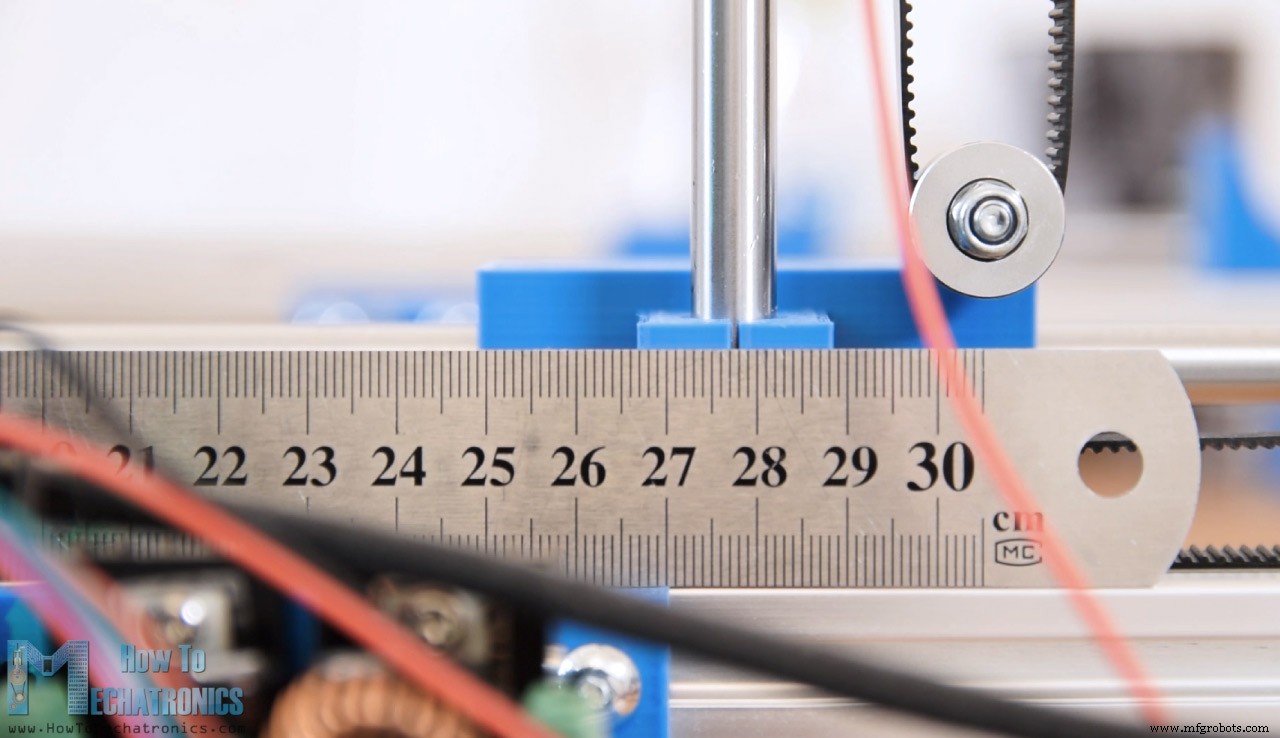
В моем случае для самодельного станка с ЧПУ, который я сделал, станок сдвинулся на 3 мм. В соответствии с этим мастер предложил обновить параметр шагов/мм до значения 83.
После обновления этого значения станок теперь движется правильно, 1 мм в программном обеспечении означает 1 мм для станка с ЧПУ.
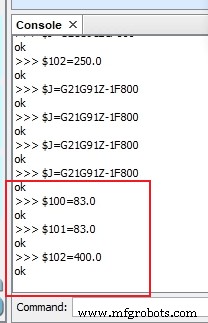
В консоли UGS, когда мы делаем каждое действие, мы можем видеть выполняемые команды. Мы можем заметить, что, обновляя параметр steps/mm, программа UGS фактически отправляла в Arduino или прошивку GRBL команду, которую мы упоминали ранее. Это было значение по умолчанию:$100 =250 000 (x, шаг/мм), а теперь мы обновили значение до 83 шагов на мм:$100 =83.
На следующем шаге мы можем включить концевые выключатели и проверить, правильно ли они работают.
В зависимости от того, являются ли они нормально открытыми или нормально закрытыми, мы также можем инвертировать их здесь.
Здесь стоит отметить, что иногда нам нужно отключить концевой выключатель оси Z. Так было с моим самодельным станком для резки пенопласта с ЧПУ, где мне не понадобился концевой выключатель оси Z, и мне пришлось отключить его, чтобы иметь возможность правильно установить станок в исходное положение. Итак, для этого нам нужно отредактировать файл config.h, который находится в папке библиотеки Arduino (или Documents\Arduino\libraries).
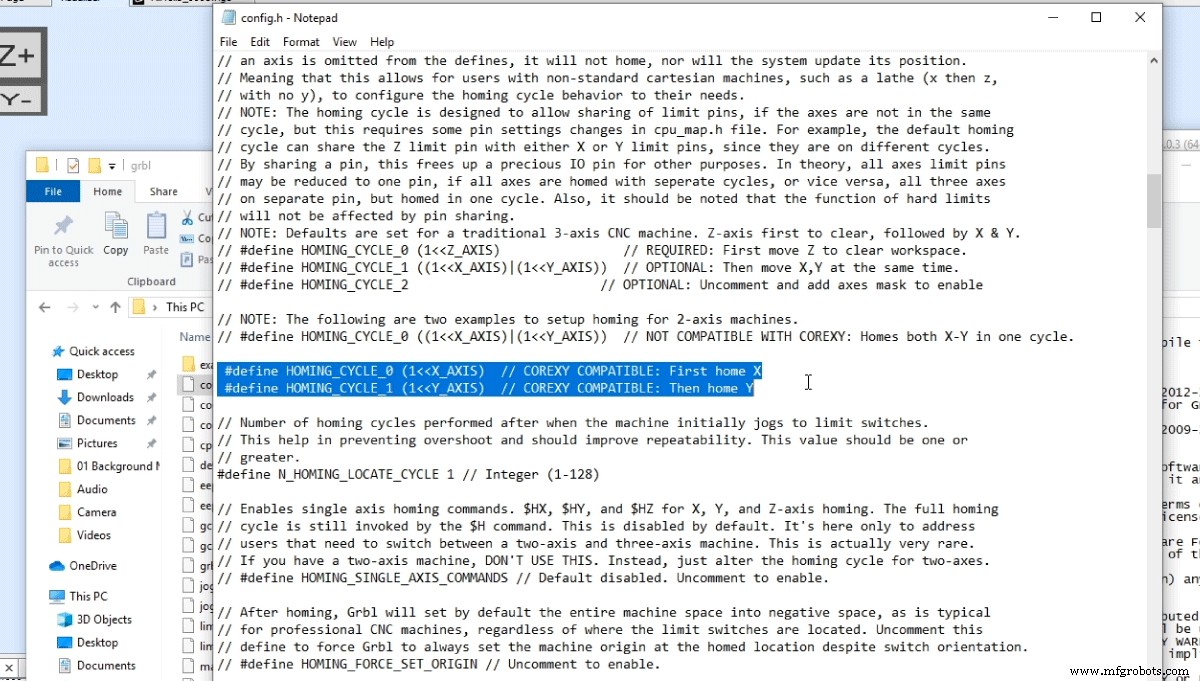
Здесь нам нужно найти линии цикла возврата в исходное положение и закомментировать набор по умолчанию для 3-осевого станка с ЧПУ и раскомментировать настройку для 2-осевого станка. Чтобы изменения вступили в силу, нам нужно сохранить файл и повторно загрузить скетч grblUpload на нашу плату Arduino.
Тем не менее, на следующем шаге мы можем либо включить, либо отключить самонаведение станка ЧПУ.
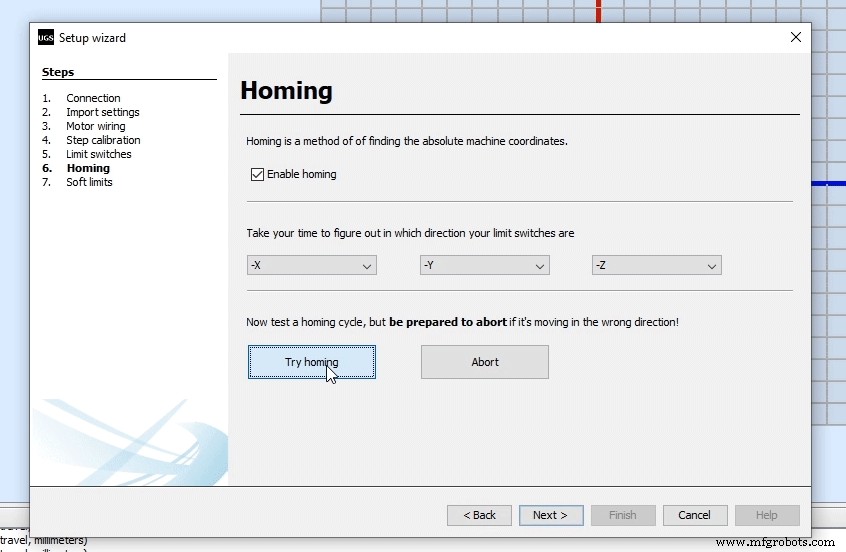
С помощью кнопки «Попробовать возврат» машина начнет движение к концевым выключателям. В случае, если он пойдет в противоположном направлении, мы можем легко изменить направление.
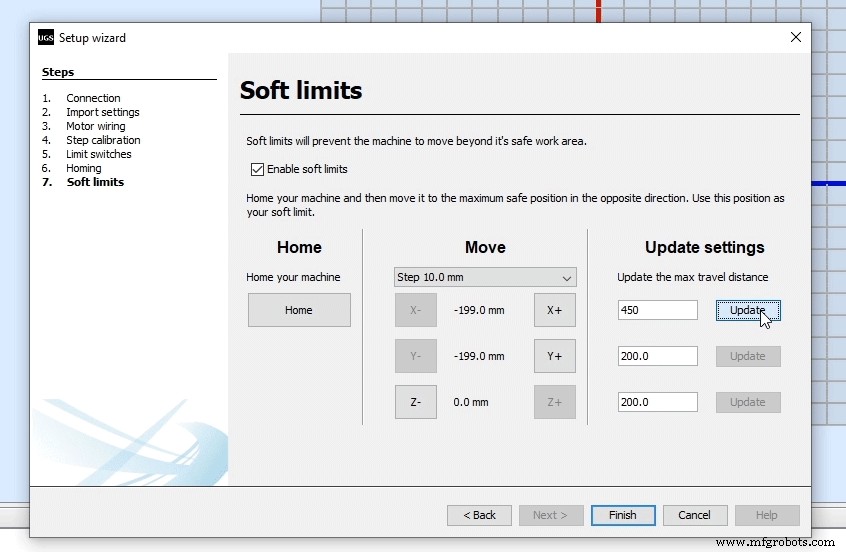
Наконец, на последнем шаге мастера настройки мы можем включить мягкие ограничения для нашего станка с ЧПУ.
Мягкие ограничения предотвращают выход машины за пределы установленной рабочей зоны.
Заключение
Итак, благодаря прошивке GRBL и Arduino мы можем легко настроить и запустить наш станок с ЧПУ DIY. Конечно, в этом руководстве мы рассмотрели только основы, но я думаю, что этого было достаточно, чтобы понять, как все работает и как настроить и запустить наш первый станок с ЧПУ.
Конечно, доступно множество других настроек и функций, так как GRBL действительно поддерживает прошивку контроллера ЧПУ. Документация GRBL подробно объясняет все это, поэтому вы всегда можете проверить их на их вики-странице на github.com.
Кроме того, существует множество других программ контроллера GRBL с открытым исходным кодом, таких как Universal G-code Sender, и вот некоторые из них:GRBLweb (веб-браузер), GrblPanel (графический интерфейс Windows), grblControl (графический интерфейс Windows/Linux), Easel (на основе браузера) и т. д. . Вы должны изучить их и выбрать, какой из них подходит вам лучше всего.
Производственный процесс
- Как найти подержанный станок с ЧПУ
- Как очистить подержанный станок с ЧПУ
- Как сгенерировать файл G-кода с ArtCAM для станка с ЧПУ?
- Как избежать проблем с бывшими в употреблении станками с ЧПУ
- Как выбрать станок с ЧПУ
- Управление монетоприемником с помощью Arduino
- Токарный станок с ЧПУ
- Как обрабатывать ювелирные изделия с помощью станков с ЧПУ?
- Как автоматизировать станочные процессы с ЧПУ
- Как швейцарский станок с ЧПУ превосходен в токарной обработке?