


Объяснение G-кода | Список наиболее важных команд G-кода
<основной класс="главный сайт" id="главный">
Если ваша работа или хобби связаны со станками с ЧПУ или 3D-принтерами, то понимание того, что такое G-код и как он работает, для вас крайне важно. Итак, в этом уроке мы изучим основы языка G-кода, какие самые важные или распространенные команды G-кода и объясним, как они работают.
Что такое G-код?
G-код это язык программирования для станков с ЧПУ (ЧПУ). G-код означает «геометрический код». Мы используем этот язык, чтобы сказать машине, что делать или как что-то делать. Команды G-кода указывают машине, куда двигаться, как быстро двигаться и по какому пути следовать.
В случае станка, такого как токарный станок или фрезерный станок, режущий инструмент приводится в действие этими командами, чтобы следовать определенной траектории движения инструмента, вырезая материал, чтобы получить желаемую форму.
Точно так же в случае аддитивного производства или 3D-принтеров команды G-кода предписывают машине наносить материал слой за слоем, формируя точную геометрическую форму.
Как читать команды G-кода?
На первый взгляд, когда вы видите файл G-кода, он может показаться довольно сложным, но на самом деле его не так уж сложно понять.
Если внимательно посмотреть на код, то можно заметить, что большинство строк имеют одинаковую структуру. Кажется, что «сложная» часть G-кода — это все те числа, которые мы видим, которые являются просто декартовыми координатами.
Давайте рассмотрим одну строку и объясним, как она работает.
G01 X247.951560 Y11.817060 Z-1.000000 F400.000000
Строка имеет следующую структуру:
G## X## Y## Z## F##
- Во-первых, это команда G-кода. в данном случае это G01 что означает "переместиться по прямой линии в определенную позицию".
- Мы объявляем позицию или координаты с помощью X , Д и Z значения.
- Наконец, с F значение мы устанавливаем скорость подачи или скорость, с которой будет выполняться перемещение.
В заключение, строка G01 X247.951560 Y11.817060 Z-1.000000 F400 указывает станку с ЧПУ двигаться по прямой линии от текущего положения к координатам X247.951560, Y11.817060 и Z-1.000000 со скоростью 400 мм. /мин. Единицей является мм/мин, потому что, если мы вернемся к примеру изображения G-кода, мы увидим, что мы использовали команду G21, которая устанавливает единицы измерения в миллиметры. Если нам нужны единицы измерения в дюймах, вместо этого мы используем команду G20.
Самые важные/распространенные команды G-кода
Итак, теперь, когда мы знаем, как читать строку G-кода, мы можем взглянуть на наиболее важные или часто используемые команды G-кода. Мы узнаем, как каждый из них работает на нескольких примерах, и к концу этого урока мы сможем полностью понять, как работает G-код, как его читать, как модифицировать и даже как написать собственный G-код.
G00 — Быстрое позиционирование
G00 команда перемещает машину на максимальной скорости движения из текущего положения в указанную точку или координаты, указанные командой. Станок будет перемещать все оси одновременно, поэтому они совершают перемещение одновременно. Это приводит к прямолинейному перемещению к новой точке положения.
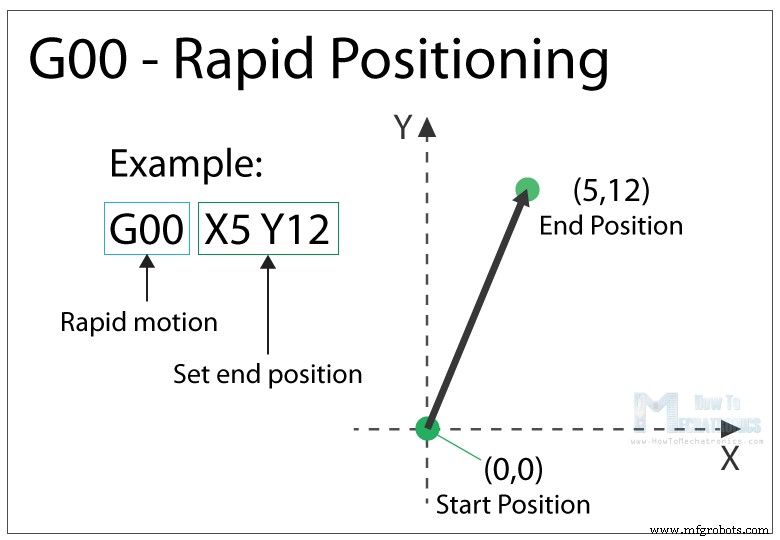
G00 — это движение, не связанное с резанием, и его цель — просто быстро переместить машину в нужное положение, чтобы начать какую-либо работу, например резку или печать.
G01 — Линейная интерполяция
G01 Команда G-кода указывает станку двигаться по прямой линии с заданной скоростью подачи или скоростью. Мы указываем конечную позицию с помощью X , Д и Z значения и скорость с F ценность. Контроллер машины вычисляет (интерполирует) промежуточные точки, через которые нужно пройти, чтобы получить эту прямую линию. Хотя эти команды G-кода просты и интуитивно понятны, за ними контроллер станка выполняет тысячи вычислений в секунду, чтобы выполнять эти движения.
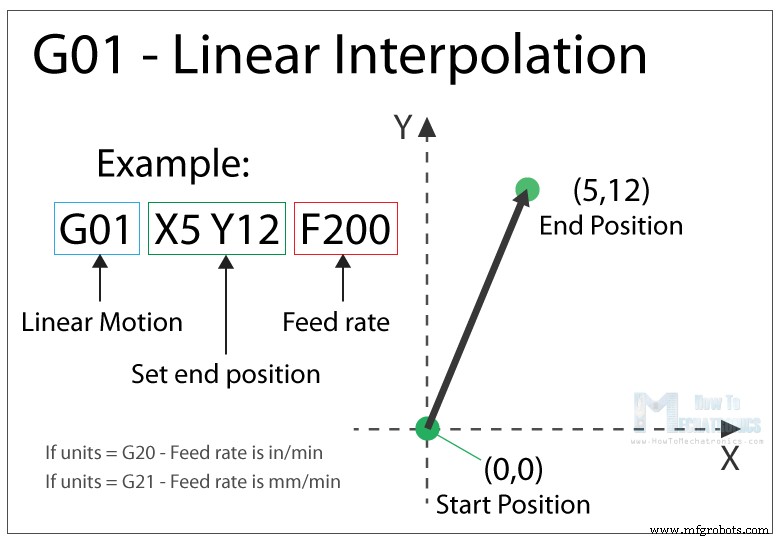
В отличие от команды G00, которая используется только для позиционирования, команда G01 используется, когда станок выполняет свою основную работу. В случае токарного станка или фрезерного станка — резка материала по прямой линии, а в случае 3D-принтера — выдавливание материала по прямой линии.
G02 — круговая интерполяция по часовой стрелке
G02 Команда указывает машине двигаться по часовой стрелке по кругу. Это та же концепция, что и у команды G01, и она используется при выполнении соответствующего процесса обработки. В дополнение к параметрам конечной точки здесь также необходимо определить центр вращения или расстояние начальной точки дуги от центральной точки дуги. Начальная точка на самом деле является конечной точкой предыдущей команды или текущей точкой.
Для лучшего понимания мы добавим команду G02 после команды G01 из предыдущего примера.
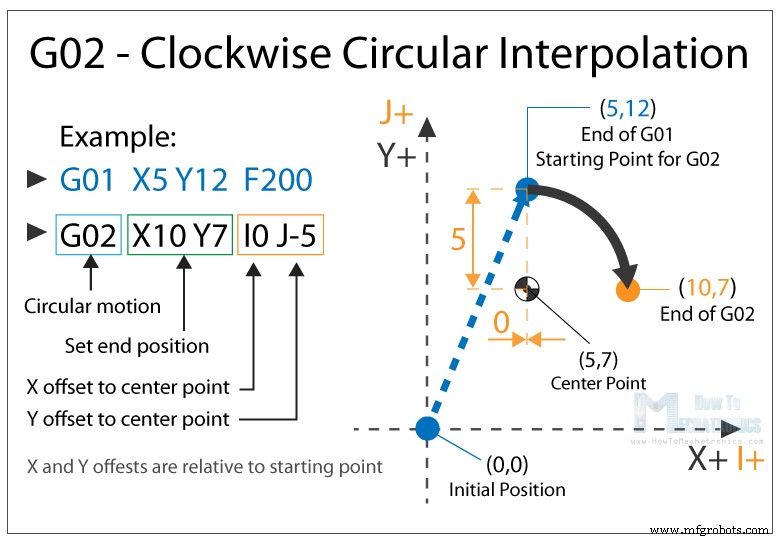
Итак, в первом примере у нас есть команда G01, которая перемещает станок в точку X5, Y12. Теперь это будет отправной точкой для команды G02. С помощью параметров X и Y команды G02 мы устанавливаем конечную точку. Теперь, чтобы добраться до этой конечной точки, используя круговое движение или дугу, нам нужно определить ее центральную точку. Мы делаем это, используя параметры I и J. Значения I и J относятся к начальной или конечной точке предыдущей команды. Итак, чтобы получить центральную точку на X5 и Y7, нам нужно сделать смещение 0. по оси X и смещение -5 по оси Y.
Конечно, мы можем установить центральную точку в любом другом месте, таким образом, мы получим другую дугу, которая заканчивается в той же конечной точке. Вот пример этого:
Итак, здесь у нас по-прежнему та же конечная точка, что и в предыдущем примере (X10, Y7), но центральная точка теперь находится в другом положении (X0, Y2). Благодаря этому мы получили более широкую дугу по сравнению с предыдущей.
См. также: Как настроить GRBL и управлять станком с ЧПУ с помощью Arduino
G00, G01, G02 Пример — программирование G-кода вручную
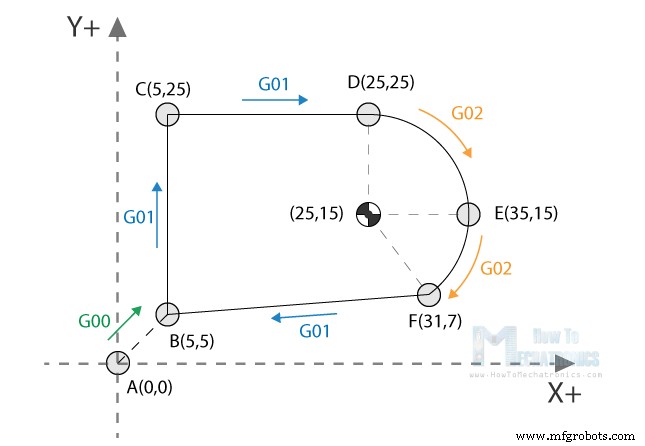
Давайте рассмотрим простой пример фрезерной обработки с ЧПУ, используя эти три основные команды G-кода:G00, G01 и G02.
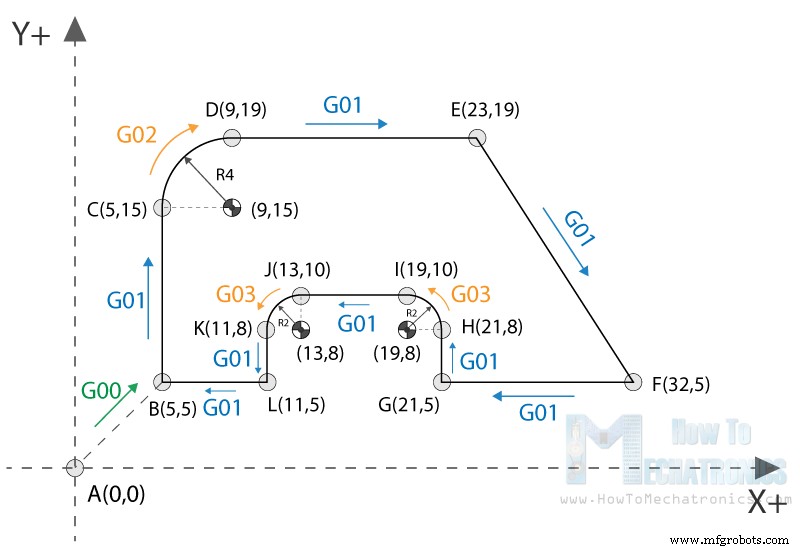
Чтобы получить траекторию для формы, показанной на изображении выше, нам нужно выполнить следующие команды G-кода:
G00 X5 Y5 ; point B
G01 X0 Y20 F200 ; point C
G01 X20 Y0 ; point D
G02 X10 Y-10 I0 J-10 ; point E
G02 X-4 Y-8 I-10 J0 ; point F
G01 X-26 Y-2 ; point BCode language: Arduino (arduino)С первым G00 по команде быстро выводим машину из исходного или исходного положения в точку B(5,5). Отсюда мы начинаем с «резки» со скоростью подачи 200, используя G01. команда. Здесь мы можем отметить, что для перехода из точки B(5,5) в точку C(5,25) мы используем значения для X и Y относительно начальной точки B. Таким образом, +20 единиц в направлении Y приведут нас к точке C(5,25). На самом деле это зависит от того, выбрали ли мы машину для интерпретации координат как абсолютных или относительных. Мы объясним это в следующем разделе.
Как только мы достигаем точки C(5,25), у нас есть еще одна команда G01 для достижения точки D(25,25). Затем мы используем команду G02, круговое движение, чтобы добраться до точки E(35,15) с центральной точкой (25,15). На самом деле у нас есть та же самая центральная точка (25,15) для следующей команды G02, чтобы добраться до точки F(31,7). Тем не менее, мы должны отметить, что параметры I и J отличаются от предыдущей команды, потому что мы смещаем центр от последней конечной точки или точки E. Мы завершаем траекторию с помощью другой команды G01, которая перемещает нас из точки F (31, 7) вернуться к точке B(5,5).
Итак, вот как мы можем вручную запрограммировать G-код для создания этой формы. Однако мы должны отметить, что это не полный G-код, потому что нам не хватает еще нескольких основных команд. Мы создадим полный G-код в следующем примере, так как сначала нам нужно объяснить эти команды G-кода.
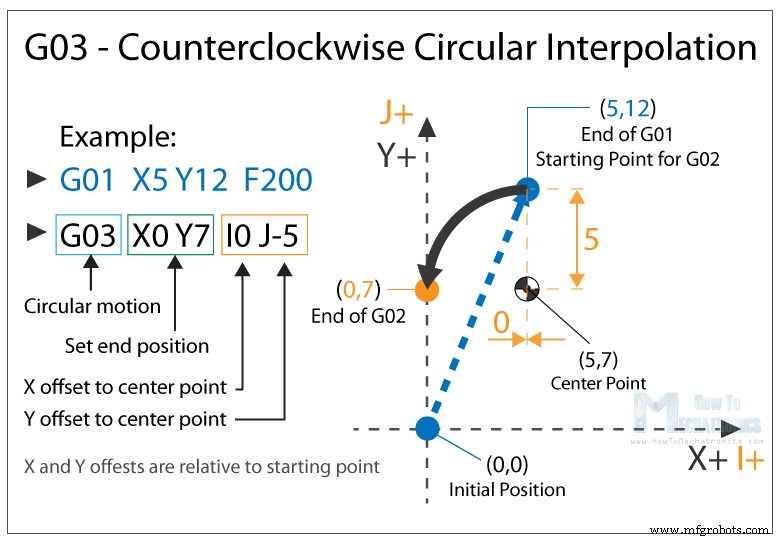
G03 — круговая интерполяция против часовой стрелки
Как и G02, G03 Команда G-кода определяет движение машины по круговой схеме. Единственная разница здесь в том, что движение происходит против часовой стрелки. Все остальные функции и правила аналогичны команде G02.
Таким образом, с этими тремя основными командами G-кода G01 , G02 и G03 мы можем сгенерировать траекторию буквально для любой формы, которую захотим. Вам может быть интересно, как это возможно, но на самом деле это простая задача для компьютера и программного обеспечения CAM. Да, иногда мы можем вручную создать программу G-кода, но в большинстве случаев мы делаем это с помощью соответствующего программного обеспечения, которое намного проще и безопаснее.
Тем не менее, теперь объясните еще несколько важных и часто используемых команд, а в конце приведите реальный пример G-кода.
G20/G21 – Выбор юнитов
Команды G20 и G21 определяют единицы измерения G-кода:дюймы или миллиметры.
- G20 =дюймы
- G21 =миллиметры
Мы должны отметить, что единицы должны быть установлены в начале программы. Если мы не укажем единицы измерения, машина будет считать их значениями по умолчанию, установленными предыдущей программой.
G17/ G18/ G18 – выбор плоскости G-кода
С помощью этих команд G-кода мы выбираем рабочую плоскость станка.
- G17 – плоскость XY
- G18 — плоскость XZ
- G19 — плоскость YZ
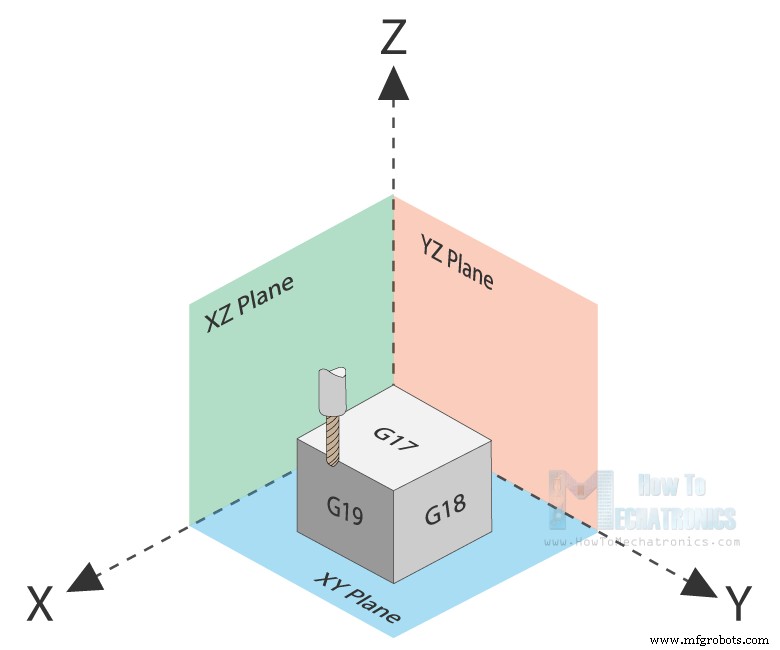
G17 используется по умолчанию для большинства станков с ЧПУ, но два других также можно использовать для выполнения определенных перемещений.
G28 – Возвращение домой
Группа 28 команда сообщает станку о необходимости перемещения инструмента в исходную точку или исходное положение. Чтобы избежать столкновения, мы можем включить промежуточную точку с параметрами X, Y и Z. Инструмент пройдет через эту точку, прежде чем перейти к контрольной точке. G28 X## Y## Z##
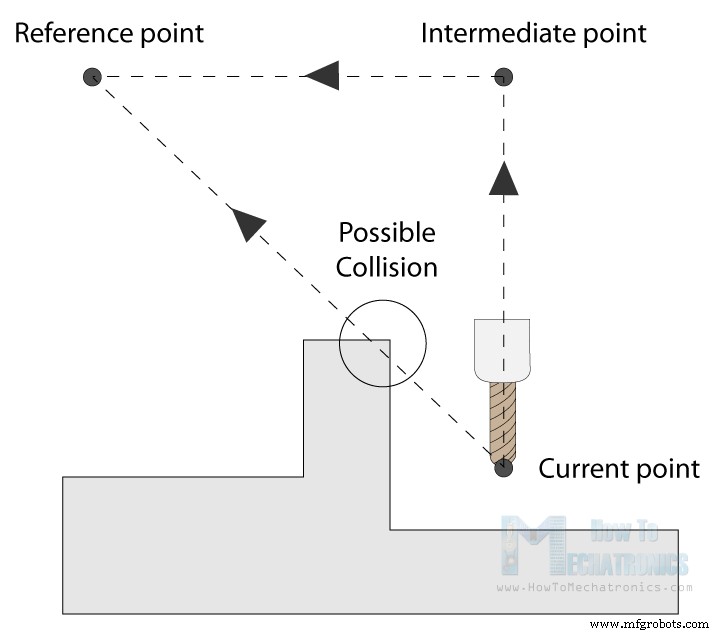
Исходное положение можно определить с помощью команды G28.1 X## Y## Z## .
G90/ G91 — команды G-кода позиционирования
С помощью команд G90 и G91 мы сообщаем машине, как интерпретировать координаты. G90 для абсолютного режима и G91 для относительного режима .
В абсолютном режиме позиционирование инструмента всегда происходит от абсолютной точки или нуля. Итак, команда G01 X10 Y5 переместит инструмент точно в эту точку (10,5), независимо от предыдущей позиции.
С другой стороны, в относительном режиме инструмент позиционируется относительно последней точки. Таким образом, если машина в данный момент находится в точке (10,10), команда G01 X10 Y5 переместит инструмент в точку (20,15). Этот режим также называется «инкрементным режимом».
Дополнительные команды и правила
Итак, команды G-кода, которые мы объяснили выше, являются наиболее распространенными, но их намного больше. Существуют такие команды, как компенсация режущего инструмента, масштабирование, рабочие системы координат, задержка и т. д.
В дополнение к G-коду существуют также команды М-кода, которые используются при создании реальной полноценной программы G-кода. Вот несколько распространенных команд М-кода:
- M00 — остановка программы
- M02 — Конец программы
- M03 — шпиндель ВКЛ — по часовой стрелке
- M04 — шпиндель ВКЛ — против часовой стрелки
- M05 — остановка шпинделя
- M06 — смена инструмента
- M08 — Включена заливка.
- M09 – Охлаждающая жидкость отключена.
- M30 — Конец программы
В случае 3D-принтера:
- M104 — запуск нагрева экструдера
- M109 – Подождите, пока экструдер не достигнет T0.
- M140 — включить подогрев кровати.
- M190 — Подождите, пока кровать не достигнет T0.
- M106 — установка скорости вентилятора.
Некоторым из этих команд нужны соответствующие параметры. Например, при включении шпинделя с помощью M03 мы можем установить скорость шпинделя с помощью параметра S. Итак, строка M30 S1000 включит шпиндель на скорости 1000 об/мин.
Мы также можем отметить, что многие коды являются модальными. , что означает, что они остаются в силе до тех пор, пока не будут отменены или заменены другим кодом. Например, допустим, у нас есть код для линейного резания G01 X5 Y7 F200 . Если следующим движением снова будет линейная резка, мы можем просто ввести координаты X и Y без надписи G01 впереди.
G01 X5 Y7 F200
X10 Y15
X12 Y20
G02 X5 Y5 I0 J-5
X3 Y6 I-2 J0Code language: Arduino (arduino)То же самое относится и к параметру скорости подачи F. Нам не нужно включать его в каждую строку, если только мы не хотим изменить его значение.
В некоторых файлах G-кода вы также можете увидеть «N## ” перед командами. Слово N просто для нумерации строки или блока кода. Это может быть полезно для определения конкретной строки в случае ошибки в большой программе.
Пример простой программы G-code
Тем не менее, прочитав все это, теперь мы можем вручную сделать настоящий, актуальный код. Вот пример:
%
G21 G17 G90 F100
M03 S1000
G00 X5 Y5 ; point B
G01 X5 Y5 Z-1 ; point B
G01 X5 Y15 Z-1 ; point C
G02 X9 Y19 Z-1 I4 J0 ; point D
G01 X23 Y19 Z-1 ; point E
G01 X32 Y5 Z-1 ; point F
G01 X21 Y5 Z-1 ; point G
G01 X21 Y8 Z-1 ; point H
G03 X19 Y10 Z-1 I-2 J0 ; point I
G01 X13 Y10 Z-1 ; point J
G03 X11 Y8 Z-1 I0 J-2 ; point K
G01 X11 Y5 Z-1 ; point L
G01 X5 Y5 Z-1 ; point B
G01 X5 Y5 Z0
G28 X0 Y0
M05
M30
%Code language: Arduino (arduino)Описание программы G-кода:
- Инициализация кода. Этот символ (%) всегда присутствует в начале и в конце программы.
- Линия безопасности:установите программирование в метрической системе (все размеры в мм), плоскость XY, абсолютное позиционирование и скорость подачи 100 дюймов/мин.
- Шпиндель вращается по часовой стрелке со скоростью 1000 об/мин.
- Быстрое позиционирование на B(5,5).
- Контролируемое движение в той же позиции, но с понижением значения инструмента до -1.
- Линейное режущее движение в положение C(5,15).
- Круговое движение по часовой стрелке к точке D(9,19) с центром в точке (9,15).
- Линейный разрез до точки E(23,19).
- Линейный разрез до точки F(32,5).
- Тот же прямой разрез до точки G(21,5).
- Еще один прямой переход к точке H(21,8).
- Круговая интерполяция против часовой стрелки до позиции I(19,10) с центральной точкой (19,8).
- Линейный разрез до точки J(13,10).
- Круговая резка против часовой стрелки до позиции K(11,8) с центром в точке (13,8).
- Линейная обрезка до позиции L(11,5).
- Заключительное линейное движение резки в положение B(5,5).
- Поднимите инструмент.
- Перейти в исходное положение.
- Выкл.
- Конец основной программы.
Вот как этот код выглядит готовым к отправке на наш станок с ЧПУ с помощью программного обеспечения Universal G-code Sender:
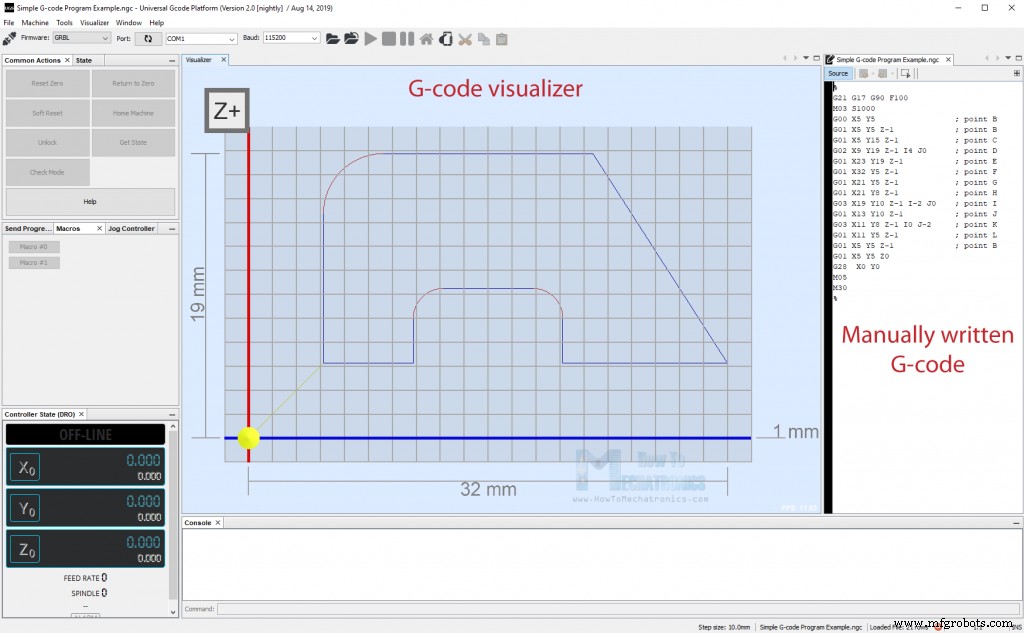
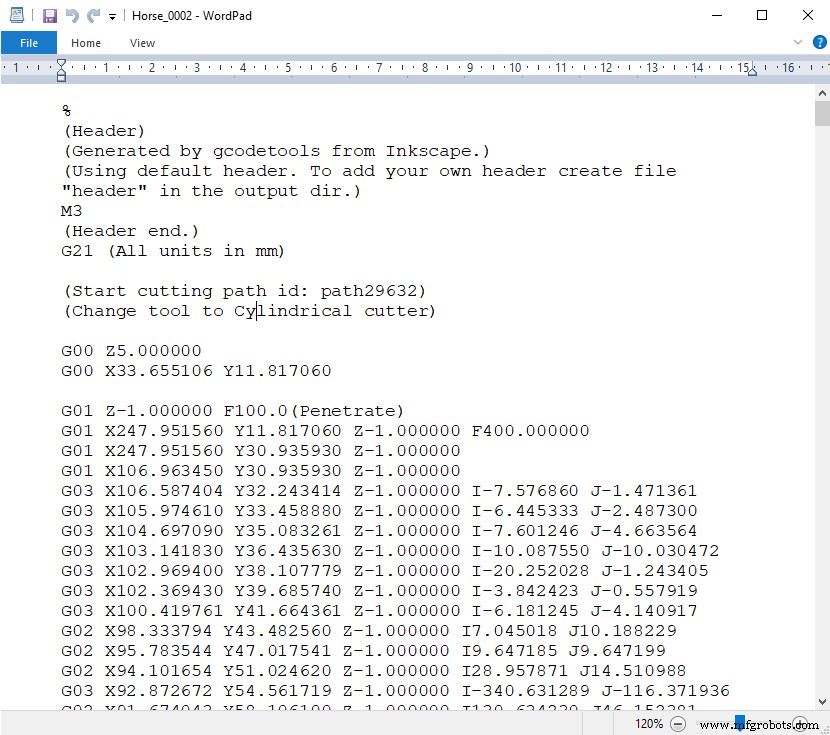
Итак, используя эти основные команды G-кода, описанные выше, нам удалось написать собственный полноценный G-код. Конечно, этот пример довольно прост, и для более сложных форм нам определенно нужно использовать программное обеспечение CAM. Вот пример сложного G-кода формы лошади:
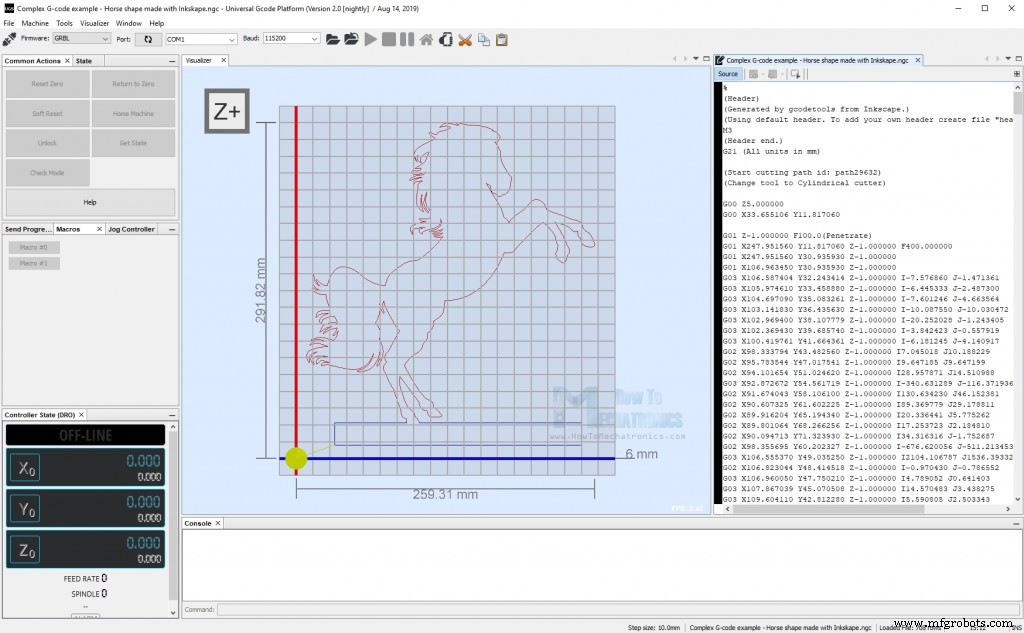
Для сравнения, в этом коде около 700 строк, но все они сгенерированы автоматически. G-код был создан с использованием Inkscape в качестве примера для моего самодельного станка для резки пенопласта Arduino с ЧПУ. Вот как получилась форма:
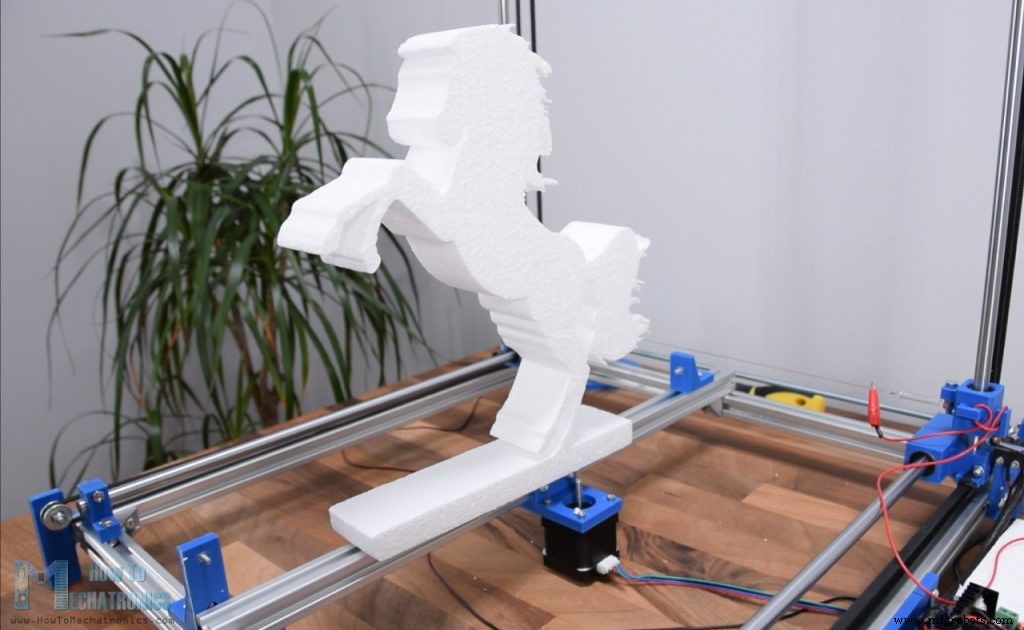
Вы можете проверить мой конкретный учебник для получения более подробной информации об этой машине.
Заключение
Итак, мы рассмотрели основы G-кода, объяснили наиболее важные и распространенные команды G-кода и вручную создали собственный настоящий G-код. В конце концов, я думаю, что понять G-код не так уж сложно. Конечно, существует так много других команд и функций, используемых в обработке с ЧПУ или 3D-печати, о которых нам следует знать, но подробнее об этом в некоторых других руководствах.
Если вы нашли эту статью полезной, поделитесь ею с другими энтузиастами ЧПУ и 3D-печати. Также не стесняйтесь задавать любые вопросы в разделе комментариев ниже.
Производственный процесс
- Наиболее важные характеристики пигментов для красок
- Описание ВЧ трансформатора
- Грейнджер попадает в список самых уважаемых компаний Fortunes
- 6 самых важных соображений перед тем, как нанять механический цех
- Машинные языки программирования:команды G-кода и M-коды
- 5 самых важных советов по безопасности крана
- 4 секрета подбора персонала на самые важные должности на заводе
- Почему дизайн для производства важен?
- 7 самых важных вещей, включенных в спецификацию (BOM)
- Список G-кодов Fanuc