


Шаговый двигатель, напечатанный на 3D-принтере
Компоненты и расходные материалы
 |
| × | 1 | |||
| × | 6 | ||||
| × | 8 | ||||
| × | 4 | ||||
| × | 1 |
Об этом проекте
https://www.youtube.com/embed/v2FNUNALSTwНедавно я наткнулся на эту инструкцию о 3D-принтере двигателя постоянного тока и решил, что могу сделать шаг дальше; В прямом смысле. Я разработал этот шаговый двигатель с восемью электромагнитами, шестью неодимовыми магнитами, с ротором и корпусом статора, напечатанным на 3D-принтере. Это, в частности, шаговый двигатель с постоянным магнитом, способный выполнять полные шаги 15 градусов и полушаги 7,5 градусов. Существует много разных типов шаговых двигателей, но большинство из них работает очень похоже на тот, который я здесь сконструировал. Это образовательный дисплей, чтобы показать другим, как работают шаговые двигатели. Я разработал его для работы от источника питания 5–12 В постоянного тока, поэтому он будет работать с большинством источников питания USB.
Я также раздаю подарки на моем канале Youtube. Я раздам Arduino, транзисторы, используемые в этом проекте, и некоторые переключатели. Подробнее на последнем шаге.
Шаг 1. Что вам понадобится
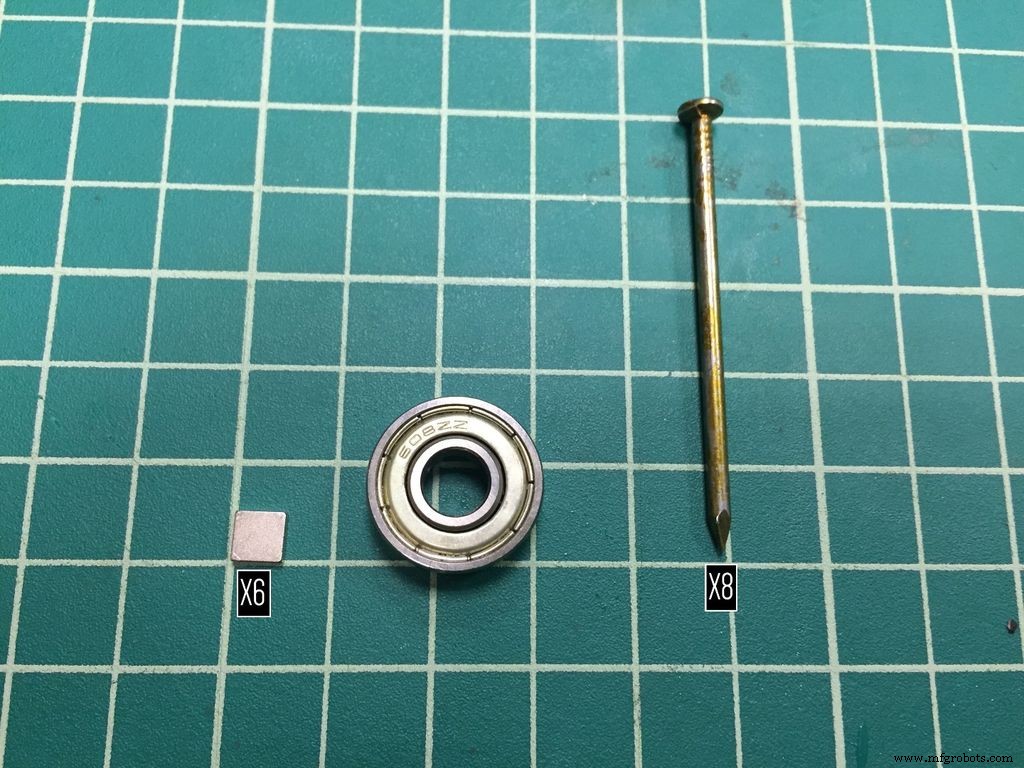


- Шесть неодимовых магнитов 1/4 дюйма.
- Подшипник 608ZZ
- Восемь гвоздей размером 8d 2-3 / 8 дюймов. Неважно, какие гвозди использовать, если они подходят.
- Магнитный провод. Я использовал магнитный провод 0,315 мм, но это не критично.
- Arduino Uno
- Четыре транзистора. Я использовал транзисторы PNP, которые у меня были, но вы можете использовать любые транзисторы или МОП-транзисторы, если убедитесь, что они выдерживают ток, потребляемый вашим двигателем. Внимательно прочтите техническое описание для получения конкретных рекомендаций. На шахте 5v двигатель потребляет около 1 ампер, а на 12v - около 3 ампер.
- Ротор и статор, напечатанные на 3D-принтере
- клей
- Изолента
- компас
Шаг 2. Распечатайте ротор двенадцатигранника и статор восьмиугольника
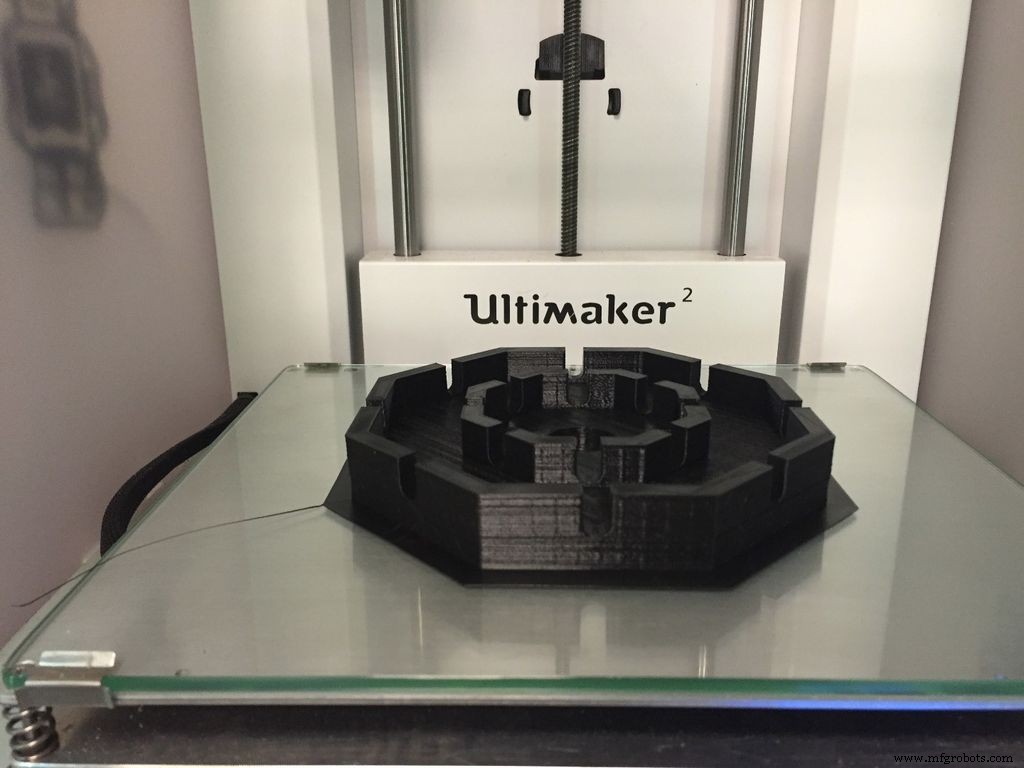
Печатайте с помощью 3D Hubs!
Шаг 3:



Используйте компас, чтобы определить полюса ваших магнитов, и приклейте магниты так, чтобы северные полюса были обращены наружу. Если ваши магниты достаточно сильные, компас на некоторых смартфонах покажет вам полярность магнитов.
Шаг 4:
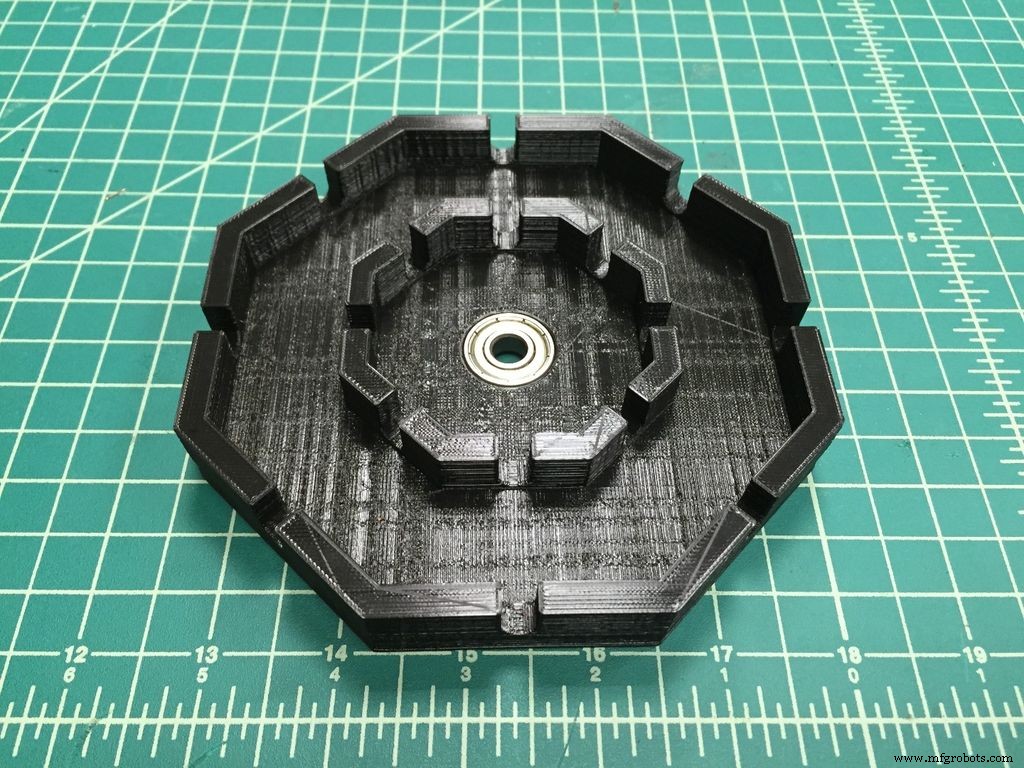

Запрессуйте подшипник в статор, а затем вдавите ротор в подшипник. Приятно удивил, насколько хорошо подшипниковый пресс вошел в статор. При 3D-печати отверстия имеют тенденцию сжиматься внутрь и в конечном итоге становятся меньше, чем ожидалось, поэтому я обычно немного увеличиваю их размер.
Шаг 5:
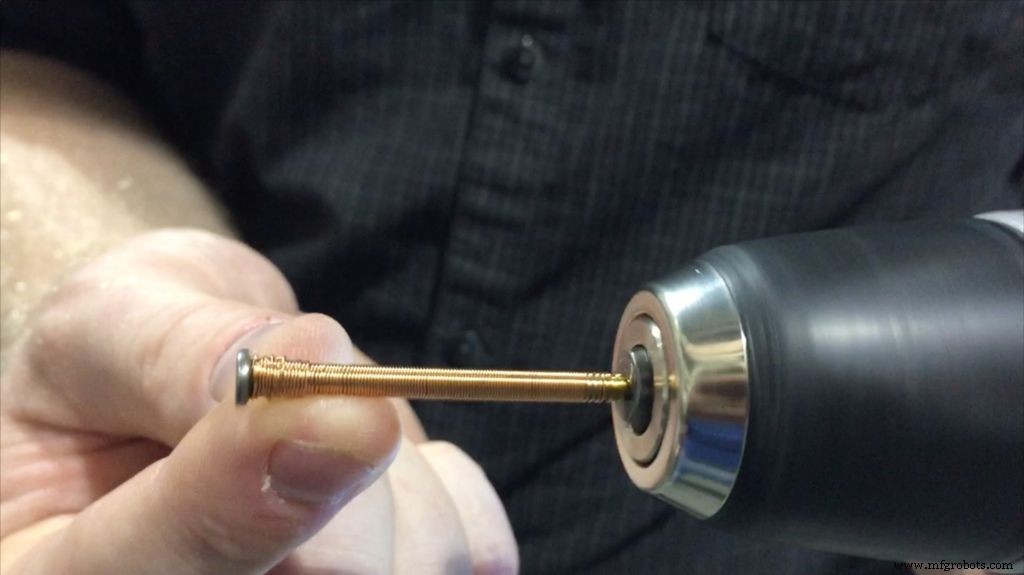

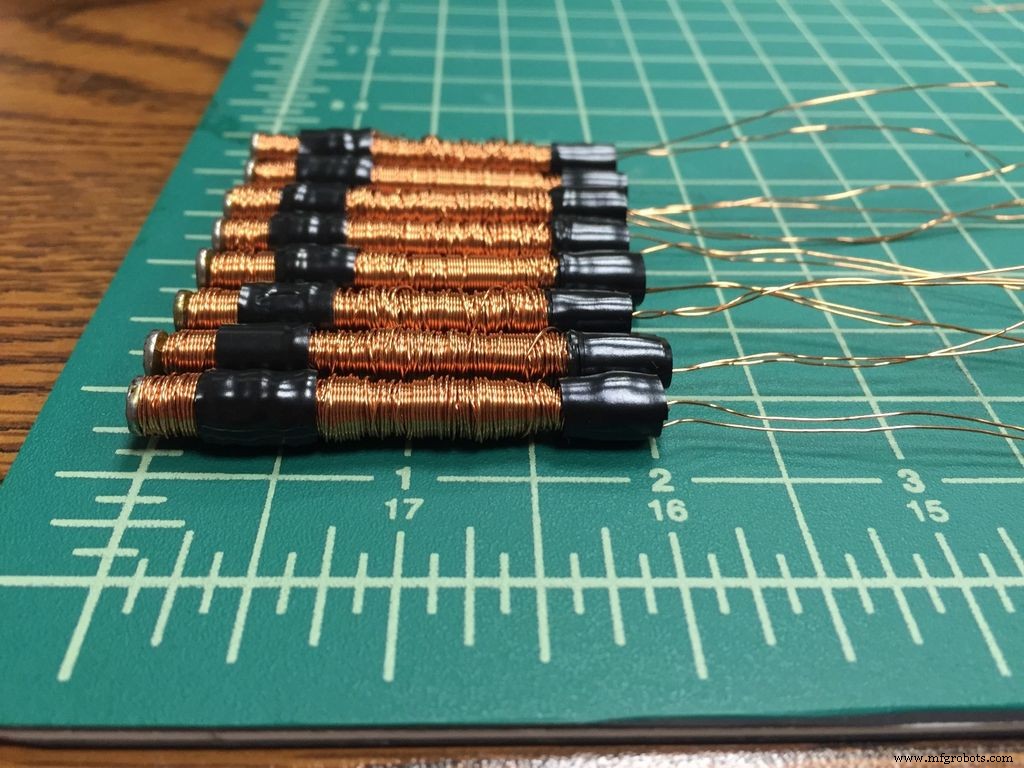
Отрежьте 9 кусков проволоки до 25 футов и намотайте их дрелью. Воспользуйтесь компасом и батареей, чтобы определить конфигурацию, необходимую для получения южного полюса на вершине гвоздя. Используйте маркер или термоусадочную трубку, чтобы пометить отрицательный вывод электромагнитов. Оберните секции электромагнитов изолентой там, где они будут соприкасаться с корпусом статора. Это служит двум целям. Он надежно удерживает электромагниты на месте, а также изолирует корпус от любого тепла, которое может выделять катушка. Пары катушек потребляют около 1 А с источником питания 5 В, который я использую. Выбранные мной транзисторы могут работать от источника питания 12 В, от которого катушки потребляют около 3 А. Проблема с источником более высокого напряжения заключается в том, что если я оставлю его работать немного, катушки начнут нагреваться.
Предупреждение:
Я разработал его для работы от источника питания 5–12 В постоянного тока. Если вы решили отклониться от проторенного пути, используйте закон Ома, чтобы определить, какой размер катушек вам нужен. V =I * R
Помните, что чем меньше обмоток на вашей катушке, тем ниже будет сопротивление. Если вы не будете осторожны, ваши катушки будут потреблять больше тока, чем может выдержать ваш блок питания или транзисторы, и могут случиться неприятности.
Шаг 6:
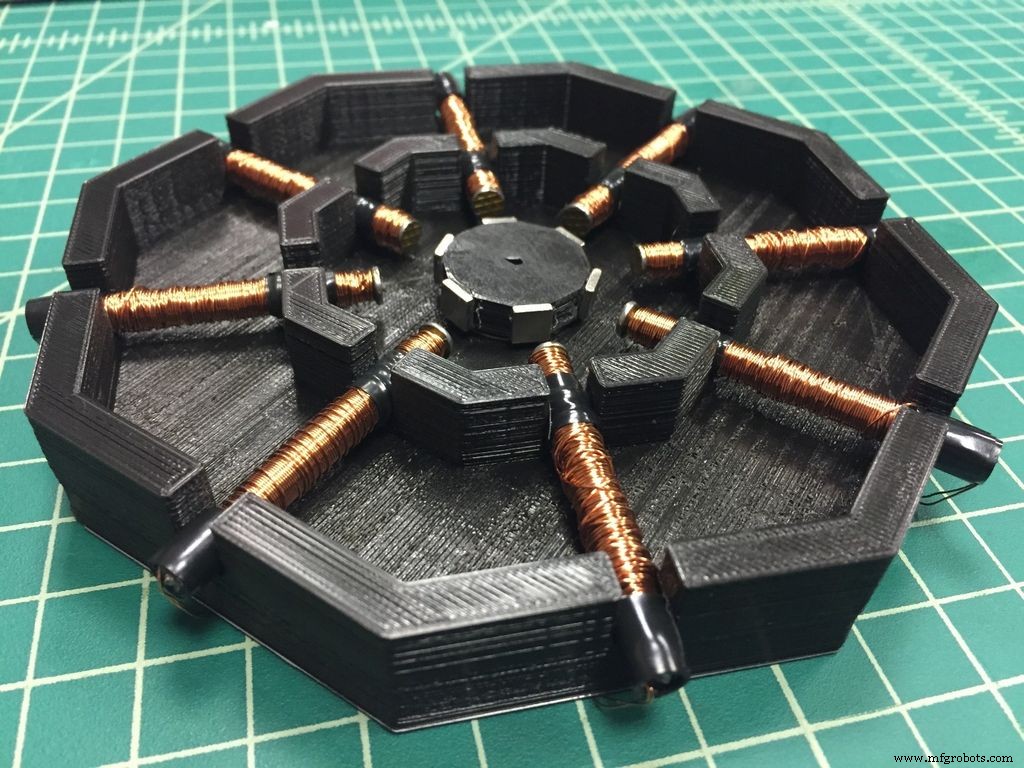
Вставляйте электромагниты в статор, пока они не окажутся примерно на 1/4 дюйма от неодимовых магнитов. Вы можете вставлять и выдвигать электромагниты по своему желанию, но я не хотел, чтобы они были слишком близко, потому что гвозди намагничиваются намного быстрее. Это обратная сторона использования гвоздей. Двигатель все равно будет работать после того, как они намагнитятся, но он будет менее эффективным. Сварочные стержни - хорошая альтернатива гвоздям, если у вас есть какие-то лежащие вокруг них.
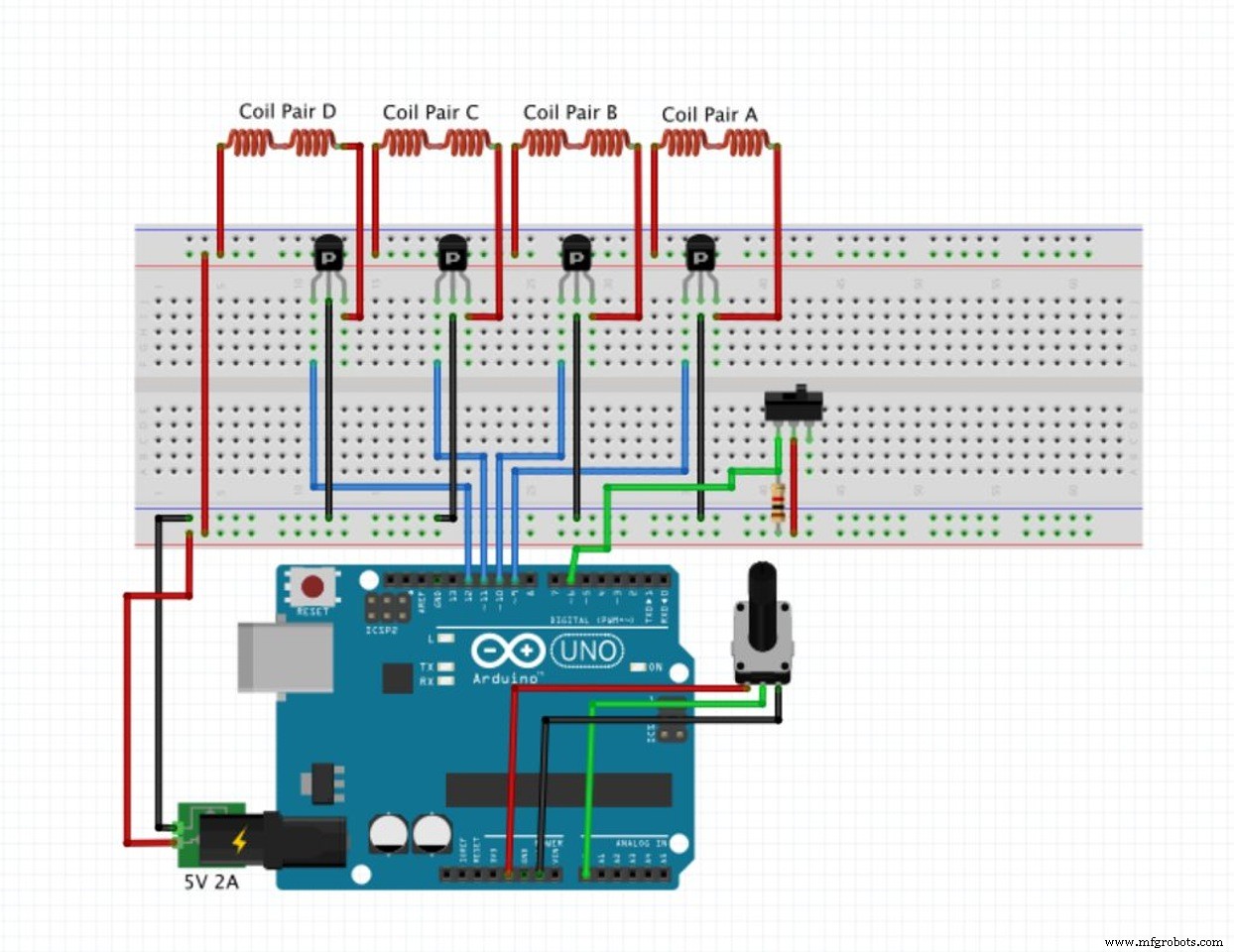
Шаг 7:спаяйте все вместе
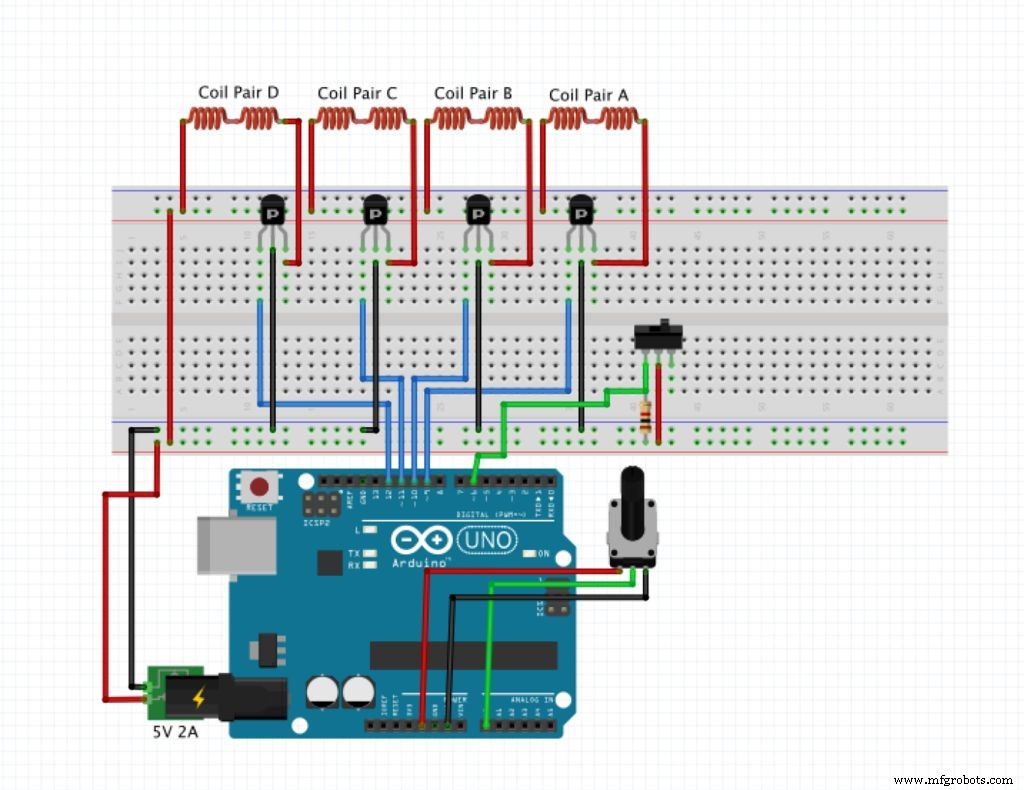
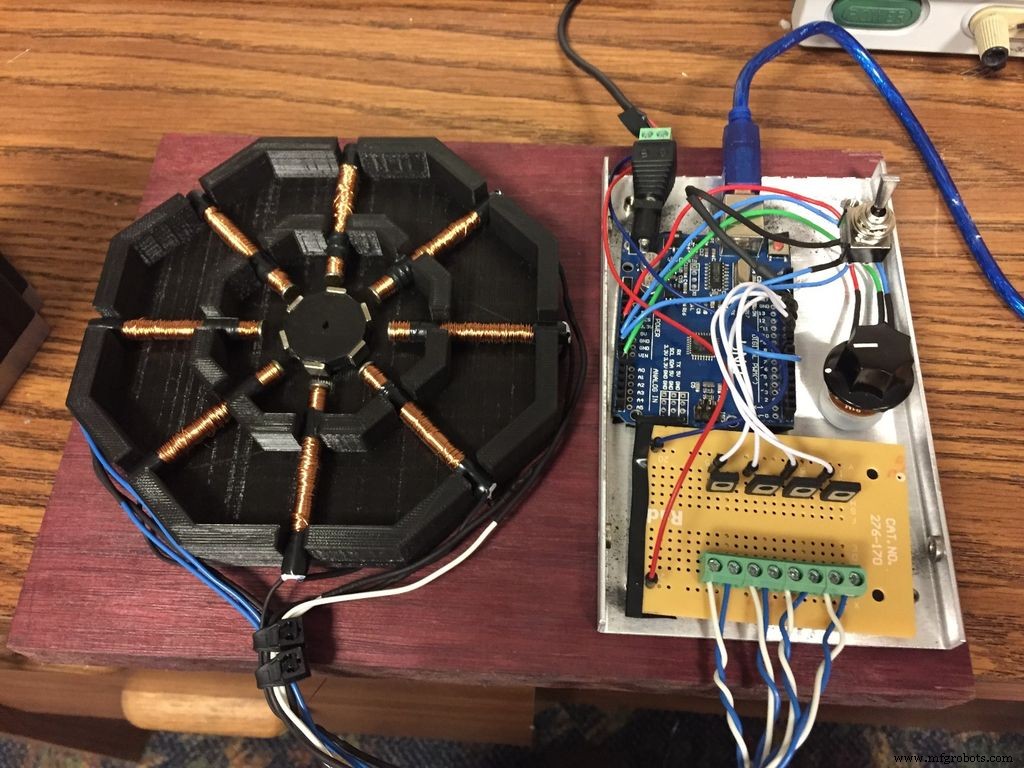
Подключите пары катушек последовательно и соедините их так, чтобы все южные полюса электромагнитов были обращены внутрь. Резистор, который я использовал в схеме, - это резистор 1 кОм. Это сделано для предотвращения "плавающего" высокого уровня цифрового вывода в выключенном состоянии. Опять же, убедитесь, что вы используете транзистор, способный выдерживать ток, необходимый для ваших катушек.
Загрузите исходный код в Arduino, и все готово!
Шаг 8. Платите вперед!

Я раздам Arduino, транзисторы, использованные в этом проекте, а также некоторые переключатели и перемычки.
Правила розыгрыша:
Подпишитесь на мою Канал YouTube , как это видео и оставьте комментарий к видео, в котором говорите, что вы хотели бы, чтобы я строил дальше. 1 сентября я случайным образом выберу комментарий подписчика и отправлю его бесплатно! Спасибо, ребята, за то, что вы такое гостеприимное сообщество!
Код
- Printed_Stepper_Motor.ino
Printed_Stepper_Motor.ino Обычный текст
/ * 010100000111001001101111011101000110111100100000010001113D Печатный шаговый двигатель Создано 15 августа 2015 г. Изменено 15 августа 2015 г. Автор:Энтони Гарофало (Proto G) Посетите мой канал на YouTube здесь:https://www.youtube.com/channel/UCpTuKBjrxfwyhttp://www.youtube.com/channel/UCpTuKbjrxfwy / /www.instructables.com/member/Proto+G/ _____ ______ _____ _______ _____ ______ | _____] | _____ / | | | | | | ____ | | \ _ | _____ | | | _____ | | _____ | 01010000011100100110111101110100011011110010000001000111 * / int Delay; int reverseSwitch; void setup () {// инициализируем цифровой вывод 13 как выход. pinMode (9, ВЫХОД); pinMode (10, ВЫХОД); pinMode (11, ВЫХОД); pinMode (12, ВЫХОД); pinMode (13, ВЫХОД); // вывод светодиода для визуализации pinMode (6, INPUT); // тумблер подключен к цифровому выводу 6 для изменения направления} void loop () {reverseSwitch =digitalRead (6); if (reverseSwitch ==HIGH) {// если переключатель реверса высокий, вращаем ротор против часовой стрелки Delay =analogRead (0); Задержка =карта (Задержка, 0, 1023, 60, 2000); digitalWrite (12, ВЫСОКИЙ); digitalWrite (13, ВЫСОКИЙ); задержка (Delay); digitalWrite (12, LOW); digitalWrite (13, LOW); задержка (5); Задержка =analogRead (0); Задержка =карта (Задержка, 0, 1023, 60, 2000); digitalWrite (11, ВЫСОКИЙ); задержка (Delay); digitalWrite (11, LOW); задержка (5); Задержка =analogRead (0); Задержка =карта (Задержка, 0, 1023, 60, 2000); digitalWrite (10, ВЫСОКИЙ); digitalWrite (13, ВЫСОКИЙ); задержка (Delay); digitalWrite (10, НИЗКИЙ); digitalWrite (13, LOW); задержка (5); Задержка =analogRead (0); Задержка =карта (Задержка, 0, 1023, 60, 2000); digitalWrite (9, ВЫСОКИЙ); задержка (Delay); digitalWrite (9, LOW); задержка (5); } else {// если переключатель реверса не высокий, вращаем ротор по часовой стрелке Delay =analogRead (0); Задержка =карта (Задержка, 0, 1023, 60, 2000); digitalWrite (9, ВЫСОКИЙ); digitalWrite (13, ВЫСОКИЙ); задержка (Delay); digitalWrite (9, LOW); digitalWrite (13, LOW); задержка (5); Задержка =analogRead (0); Задержка =карта (Задержка, 0, 1023, 60, 2000); digitalWrite (10, ВЫСОКИЙ); задержка (Delay); digitalWrite (10, НИЗКИЙ); задержка (5); Задержка =analogRead (0); Задержка =карта (Задержка, 0, 1023, 60, 2000); digitalWrite (11, ВЫСОКИЙ); digitalWrite (13, ВЫСОКИЙ); задержка (Delay); digitalWrite (11, LOW); digitalWrite (13, LOW); задержка (5); Задержка =analogRead (0); Задержка =карта (Задержка, 0, 1023, 60, 2000); digitalWrite (12, ВЫСОКИЙ); задержка (Delay); digitalWrite (12, LOW); задержка (5); }} Изготовленные на заказ детали и корпуса
Схема
Производственный процесс
- Двигатель сопротивления
- Шаговые двигатели
- Печатная плата
- Интегрированные драйверы упрощают разработку шаговых двигателей
- Прототип Raspoulette
- Автономная турель Nerf Sentry
- Библиотека биполярных шаговых двигателей
- Серая зона между серводвигателями и шаговыми двигателями
- Что такое линейный двигатель?
- Что такое серводвигатель?