


Превратите свой радиоуправляемый автомобиль в радиоуправляемый автомобиль с Bluetooth
Компоненты и расходные материалы
 |
| × | 1 | |||
 |
| × | 1 |
Необходимые инструменты и машины
 |
|
Приложения и онлайн-сервисы
| |
|
Об этом проекте




Машинки с радиоуправлением действительно интересно взламывать, и они предоставляют хорошее шасси по невысокой цене, чтобы делать роботов, но выбор одного для создания - это боль в пепле с миллионами типов. У моего младшего брата недавно был день рождения, и я хотел подарить ему что-то действительно крутое, в итоге я подарил ему эту радиоуправляемую машину. Взлом радиоуправляемого автомобиля тоже прост и сложен, поскольку радиоуправляемый автомобиль сделан по-другому, он не дает простого и определенного способа взломать автомобиль, но этот хак универсален. Я также постараюсь рассказать о всех частях и теории каждого модуля. Мы использовали модуль, но вы можете сделать нашу схему, кроме pro mini.
Мне было очень неудобно с промини, потому что он был слишком маленьким, но это было весело.
Посмотрите видео и не забудьте подписаться на новые видео
Шаг 1. Подбор подходящего шасси



Список деталей
- ProMini
- Модуль L293d
- hc-05
- Радиоуправляемый автомобиль
Подбор подходящего шасси
При выборе шасси стоит вопрос о приводном механизме. Приводных механизмов много.
Давайте поговорим о двух самых популярных механизмах.
Дифференциальный привод Что такое дифференциальный привод?
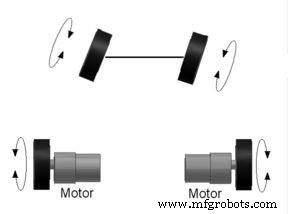
Термин «дифференциал» означает различие между двумя объектами, в контексте робототехники это просто разница скоростей между двумя двигателями. На основе этой разницы скоростей робот может перемещаться в любом направлении на двухмерной схеме.
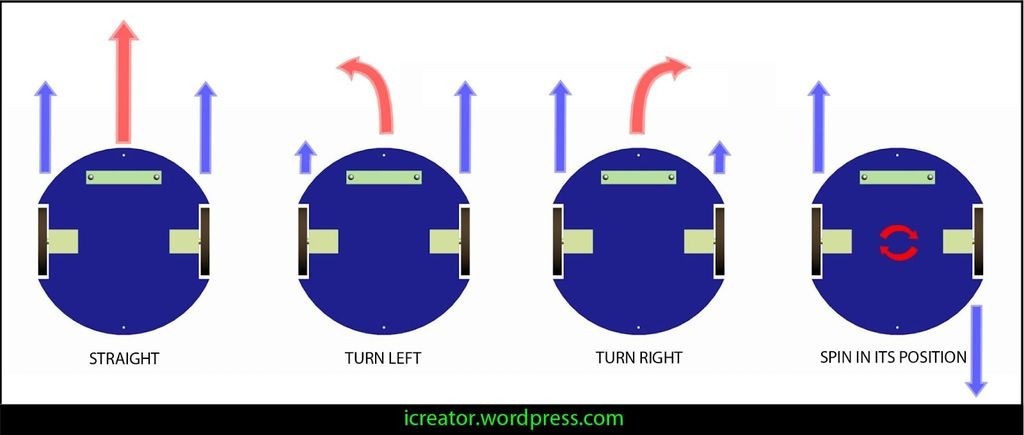
Когда два двигателя соединены с колесами в одну линию, противоположно друг другу (как пара колес, соединенных с одним валом), скорость, с которой каждый двигатель вращается, определяет направление движения. Когда оба колеса вращаются с одинаковой скоростью, разница между двигателями равна нулю. Это заставляет робота двигаться вперед по прямой. Робот может двигаться в обратном направлении, если направление вращения обоих двигателей меняется на противоположное. Если разница скоростей равна нулю, это снова будет прямая линия. Теперь изменение скорости любого из двигателей приведет к движению в направлении от прямой. Например, уменьшение скорости правого двигателя приведет к разнице скоростей и, следовательно, к изменению направления. Результирующая сила такова, что робот поворачивает вправо. Этим изменением направления можно управлять до необходимого угла за счет дальнейшего снижения скорости двигателя. Чем ниже правый двигатель, тем круче поворот направо. То же самое и с левым поворотом.
Как вывод, медленнее правый мотор, круче правый поворот. Левый мотор медленнее. Более резкий левый поворот. Ниже приведены несколько сценариев, объясняющих работу механизма дифференциала привода. M1 и M2 - это двигатели, приводящие в движение колеса слева и справа соответственно.
Привод рулевого управления
Что такое рулевой привод?
Привод автомобильного типа является наиболее распространенным в реальном мире, но не в мире роботов. Он характеризуется парой ведущих колес и отдельной парой рулевых колес. Поступление и вращение независимы друг от друга. Но перемещение и вращение взаимосвязаны, поэтому эта система сталкивается с серьезной проблемой планирования пути. Четыре колеса более эффективны по сравнению с тремя или двумя колесами. Первые два из четырех колес можно использовать для управления, а следующие два - для управления роботом. Балансировка четырехколесного робота никогда не является проблемой. Большинство повседневных автомобилей, которые мы используем, четырехколесные, и этого достаточно, чтобы доказать его существование и возможности.
Недостатки автомобильного привода :Механизм поворота необходимо точно контролировать. Небольшая неточность может вызвать большие одометрические ошибки. Система не является голономной, поэтому планирование траектории чрезвычайно сложно, а также неточно. Отсутствуют приводы прямого направления
Так что лучше использовать дифференциальный привод, поскольку он прост и удобен в использовании.
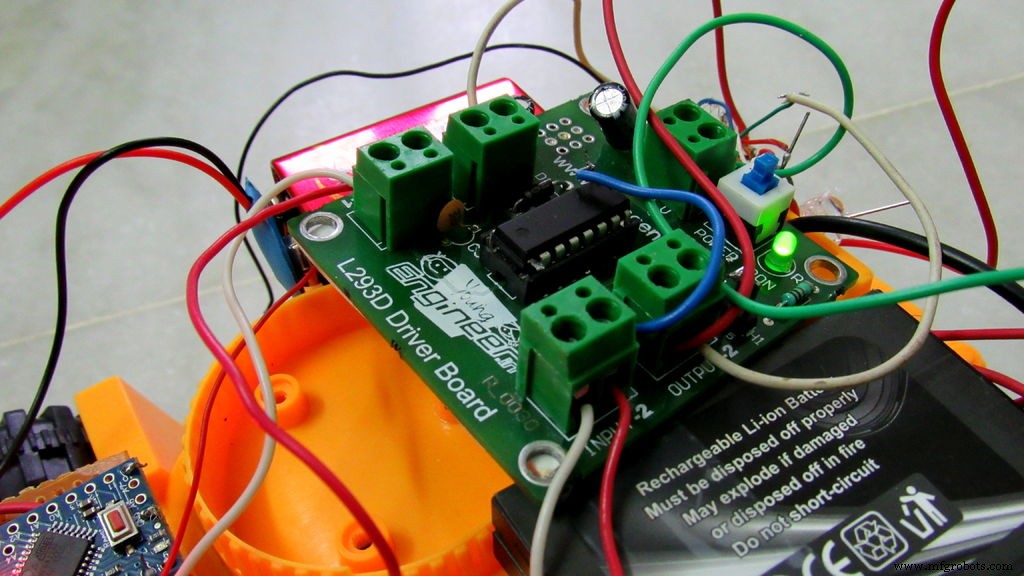
Шаг 2. Управление двигателями
Чтобы управлять двигателем, нам нужно что-то, что называется драйвером двигателя.
Что такое драйвер двигателя?
Драйвер двигателя - это небольшой усилитель тока; Функция драйверов двигателей состоит в том, чтобы принимать слаботочный управляющий сигнал и затем преобразовывать его в более сильный сигнал, который может управлять двигателем.
Есть много драйверов двигателей, из которых я использую модуль драйвера двигателя l293d.
L293D - это интегральная схема драйвера двигателя, которая используется для управления двигателями постоянного тока, вращающимися в любом направлении. Это 16-контактная ИС, которая может одновременно управлять двумя двигателями постоянного тока. L293D использует 5 В для собственного питания, и для управления двигателями необходим внешний источник питания, который может быть до 36 В и потреблять до 600 мА. L293D работает по концепции типичного H-моста, схемы, которая позволяет передавать высокое напряжение в любом направлении. В одной ИС L293D есть две Н-мостовые схемы, которые могут вращать два двигателя постоянного тока независимо.
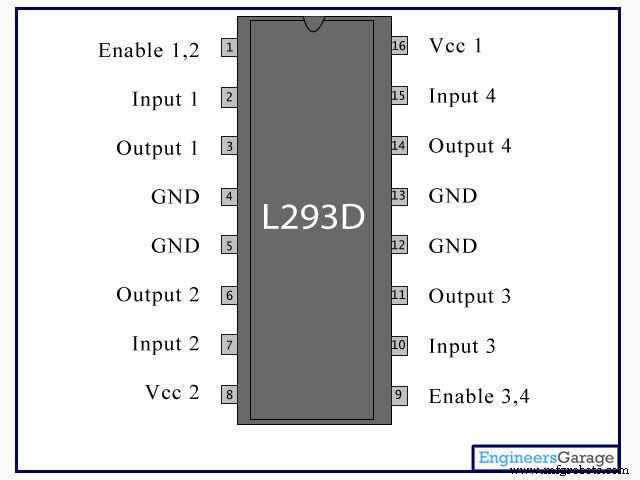
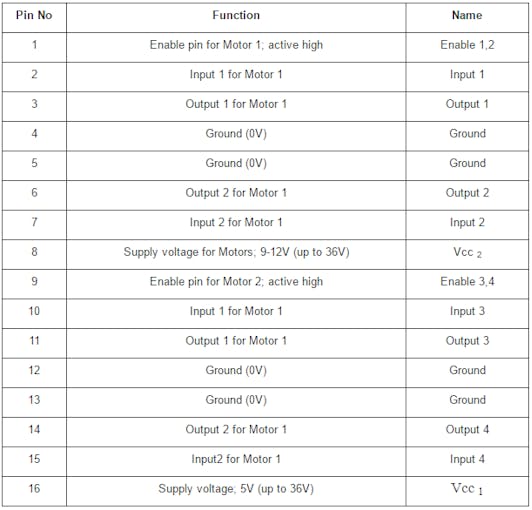
Описание пина L293d
1 Контакт включения двигателя 1; активный высокий Разрешить 1,2 2 Вход 1 для двигателя 1 Вход 1 3 Выход 1 для двигателя 1 Выход 1 4 Земля (0 В) Земля 5 Земля (0 В) Земля 6 Выход 2 для двигателя 1 Выход 2 7 Вход 2 для двигателя 1 Вход 2 8 Напряжение питания для двигателей; 9-12 В (до 36 В) Vcc 2 9 Контакт включения для двигателя 2; активный высокий Разрешить 3,4 10 Вход 1 для двигателя 1 Вход 3 11 Выход 1 для двигателя 1 Выход 3 12 Земля (0 В) Земля 13 Земля (0 В) Земля 14 Выход 2 для двигателя 1 Выход 4 15 Вход 2 для двигателя 1 Вход 4 16 Напряжение питания; 5 В (до 36 В) Vcc 1
Шаг 3. О приложении
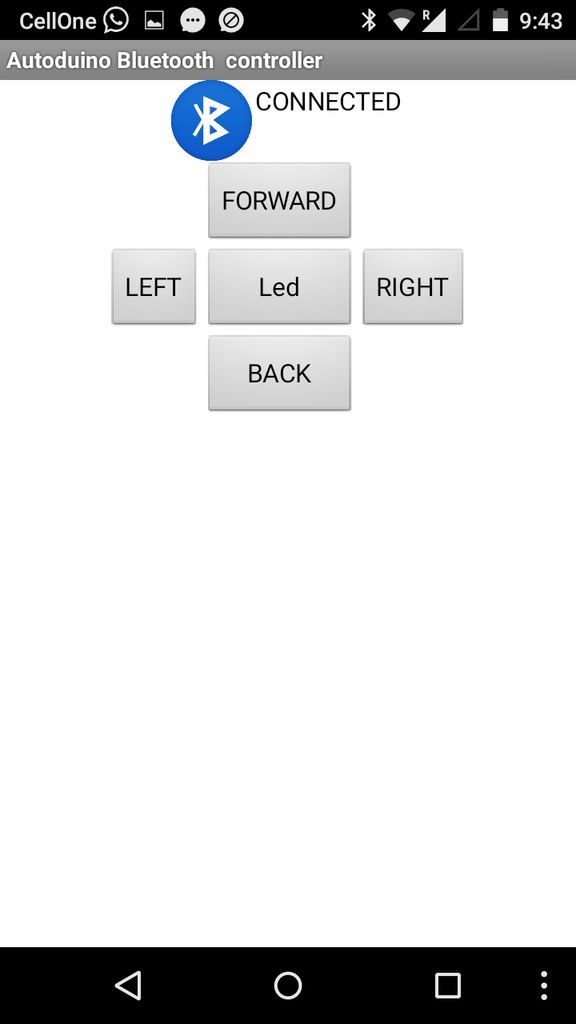


Есть много приложений для управления, которые я сделал с помощью одного. Логика очень проста:кнопка отправляет символ при нажатии через Bluetooth, а arduino обрабатывает его.
Функции символов
X Нулевое состояние F Движение вперед B Движение назад L Повернуть налево R Повернуть направо
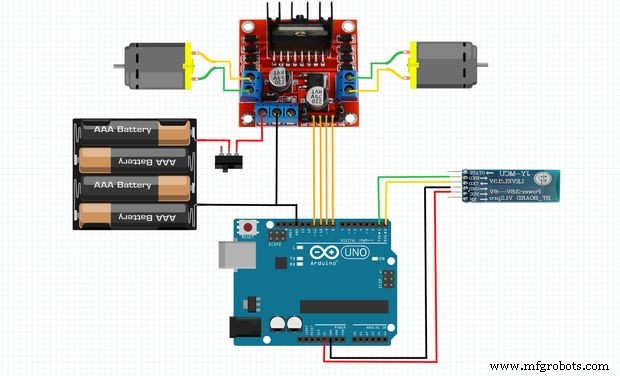
Шаг 4. Соедините все детали
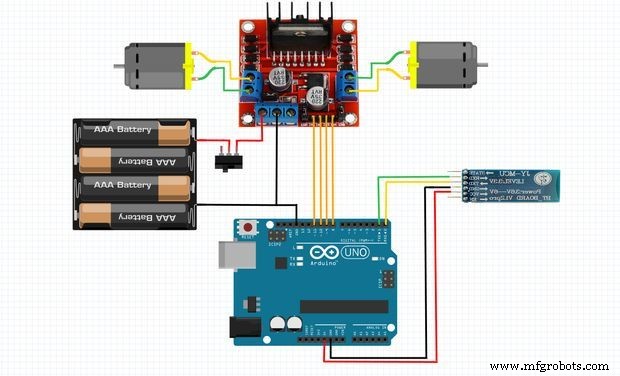

Подключения просты
вот соединение следующим образом
Модуль Bluetooth
Hc-05 Arduino Vcc 5V Gnd Gnd Rx Tx Tx Rx
Драйвер мотора
Драйвер двигателя Arduino контакт 2 8 контакт 7 7 контакт 10 6 контакт 4 9 контакт 3 и 6 Двигатель 1 контакт 11 и контакт 14 Двигатель 2 контакт 1 5 В контакт 9 5 В
Шаг 5. Кодирование


void setup () {Serial.begin (9600); pinMode (8, OUTPUT); pinMode (7, OUTPUT); pinMode (9, OUTPUT); pinMode (6, OUTPUT); pinMode (5, ВЫХОД); pinMode (4, ВЫХОД); digitalWrite (4, LOW); digitalWrite (5, LOW);} // функция цикла выполняется снова и снова навсегдаvoid loop () {var =Serial.read (); if (var =='F') {digitalWrite (6, LOW); digitalWrite ( 7, ВЫСОКИЙ); digitalWrite (8, LOW); digitalWrite (9, HIGH);} if (var =='H') {digitalWrite (frled1, HIGH);} if (var =='B') {analogWrite ( спиден, 150); digitalWrite (6, HIGH); digitalWrite (7, LOW); digitalWrite (8, HIGH); digitalWrite (9, LOW); digitalWrite (bcled1, HIGH);} если (var =='X') {digitalWrite (9, LOW); digitalWrite (8, LOW); digitalWrite (7, LOW); digitalWrite (6, LOW); digitalWrite (frled1, LOW); digitalWrite (bcled1, LOW);} if (var =='L') {digitalWrite (6, LOW); digitalWrite (7, LOW); digitalWrite (8, HIGH); digitalWrite (9, LOW);} if (var =='R') {digitalWrite (6, HIGH); digitalWrite (7, LOW); digitalWrite (8, LOW); digitalWrite (9, LOW);;}} Надеюсь, вам понравится делать этот проект, как и я. Я скоро опубликую еще несколько интересных проектов, так что подписывайтесь на меня, чтобы получать все обновления. Также как моя страница https://www.facebook.com/makewithRex/
F09ZCJSIP2UG2XP.ino
Код
- Фрагмент кода №1
Фрагмент кода №1 Обычный текст
void setup () {Serial.begin (9600); pinMode (8, ВЫХОД); pinMode (7, ВЫХОД); pinMode (9, ВЫХОД); pinMode (6, ВЫХОД); pinMode (5, ВЫХОД); pinMode (4, ВЫХОД); digitalWrite (4, LOW); digitalWrite (5, LOW);} // функция цикла выполняется снова и снова навсегдаvoid loop () {var =Serial.read (); если (var =='F') {digitalWrite (6, LOW); digitalWrite (7, HIGH); digitalWrite (8, LOW); digitalWrite (9, HIGH); } если (var =='H') {digitalWrite (frled1, HIGH); } если (var =='B') {analogWrite (speeden, 150); digitalWrite (6, HIGH); digitalWrite (7, LOW); digitalWrite (8, HIGH); digitalWrite (9, LOW); digitalWrite (bcled1, HIGH); } если (var =='X') {digitalWrite (9, LOW); digitalWrite (8, LOW); digitalWrite (7, LOW); digitalWrite (6, LOW); digitalWrite (frled1, LOW); digitalWrite (bcled1, LOW); } if (var =='L') {digitalWrite (6, LOW); digitalWrite (7, LOW); digitalWrite (8, HIGH); digitalWrite (9, LOW); } if (var =='R') {digitalWrite (6, HIGH); digitalWrite (7, LOW); digitalWrite (8, LOW); digitalWrite (9, LOW);; }} Схема
Производственный процесс
- С# конструктор
- Превратите Raspberry Pi в фитнес-трекер для хомяков
- Ваш смартфон и подключенный автомобиль
- Как превратить цепочку поставок в центр прибыли
- Как превратить ваши творческие замыслы в реальность?
- Как починить автомобильный кондиционер за несколько шагов
- Как выбрать турбокомпрессор для своего автомобиля?
- Как починить дверную ручку автомобиля
- Как заправить автомобильный кондиционер
- Как отремонтировать ржавчину на машине?