


Бесщеточный двигатель постоянного тока
Бесщеточные двигатели постоянного тока были разработаны на основе обычных щеточных двигателей постоянного тока с использованием твердотельных силовых полупроводников. Итак, почему мы обсуждаем бесщеточные двигатели постоянного тока в главе, посвященной двигателям переменного тока?
Бесщеточные двигатели постоянного тока аналогичны синхронным двигателям переменного тока. Основное отличие состоит в том, что синхронные двигатели вырабатывают синусоидальную обратную ЭДС . по сравнению с прямоугольной или трапециевидной обратной ЭДС для бесщеточных двигателей постоянного тока.
В обоих статор создает вращающиеся магнитные поля, создающие крутящий момент в магнитном роторе.
Синхронные двигатели обычно имеют большую мощность в несколько киловатт, часто с электромагнитными роторами. Истинные синхронные двигатели считаются односкоростными, составляющими частоту, равную частоте сети. Бесщеточные двигатели постоянного тока обычно имеют небольшие размеры - от нескольких ватт до десятков ватт, с роторами с постоянными магнитами.
Скорость бесщеточного двигателя постоянного тока не является фиксированной, если только он не приводится в действие фазированной автоподстройкой частоты, подчиненной опорной частоте. Стиль конструкции либо цилиндрический, либо блинный.
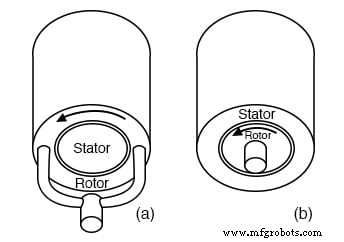
Цилиндрическая конструкция:(а) внешний ротор, (б) внутренний ротор
Самая обычная конструкция, цилиндрическая, может иметь две формы (рисунок выше). Чаще всего используется цилиндрический тип с ротором внутри, вверху справа. Этот тип двигателя используется в жестких дисках. Также возможно разместить ротор снаружи вокруг статора.
Так обстоит дело с бесщеточными двигателями вентилятора постоянного тока без вала. Такой стиль постройки может быть коротким и толстым. Однако направление магнитного потока радиально по отношению к оси вращения.
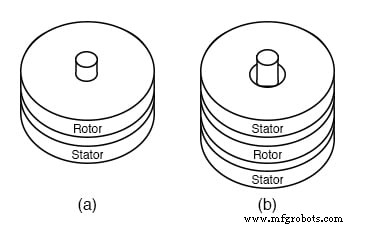
Конструкция двигателя-блинчика:(а) одинарный статор, (б) двойной статор
Электродвигатели-блины с высоким крутящим моментом могут иметь обмотки статора с обеих сторон ротора (рисунок выше-b).
Для применений с низким крутящим моментом, таких как двигатели дисководов гибких дисков, достаточно катушки статора на одной стороне ротора (рисунок выше-a). Направление магнитного потока - осевое, то есть параллельно оси вращения.
Функцию коммутации могут выполнять различные датчики положения вала:оптический энкодер, магнитный энкодер (резольвер, синхронизатор и т. Д.) Или магнитные датчики на эффекте Холла. В небольших недорогих двигателях используются датчики на эффекте Холла.
Датчик на эффекте Холла - это полупроводниковый прибор, в котором на поток электронов действует магнитное поле, перпендикулярное направлению тока. Похоже на сеть с четырьмя выводами переменного резистора. Напряжения на двух выходах дополняют друг друга.
Приложение магнитного поля к датчику вызывает небольшое изменение напряжения на выходе. Выход Холла может управлять компаратором, чтобы обеспечить более стабильную работу силового устройства. Или он может управлять составным транзисторным каскадом при правильном смещении.
Более современные датчики на эффекте Холла могут содержать интегрированный усилитель и цифровую схему. Это трехпроводное устройство может напрямую управлять силовым транзистором, питающим фазную обмотку. Датчик должен быть установлен рядом с ротором постоянного магнита, чтобы определять его положение.

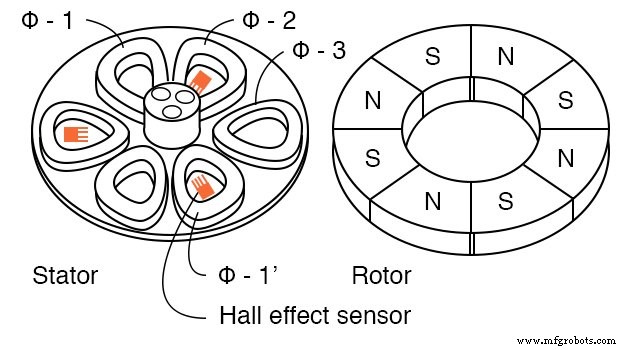
Датчики на эффекте Холла переключают бесщеточный двигатель постоянного тока 3 φ
Простой цилиндрический 3-фазный двигатель (рисунок выше) коммутируется устройством на эффекте Холла для каждой из трех фаз статора. Изменяющееся положение ротора с постоянным магнитом воспринимается устройством Холла при изменении полярности проходящего полюса ротора.
Этот сигнал Холла усиливается, так что катушки статора приводят в действие соответствующий ток. Здесь не показано, сигналы Холла могут обрабатываться комбинаторной логикой для более эффективных форм сигнала возбуждения.
Вышеупомянутый цилиндрический двигатель мог бы управлять жестким диском, если бы он был оборудован фазированной автоподстройкой частоты (PLL) для поддержания постоянной скорости. Аналогичная схема могла управлять двигателем дисковода для гибких дисков (рисунок ниже). Опять же, для поддержания постоянной скорости потребуется система ФАПЧ.
Бесщеточный мотор для блинов
Блинный двигатель 3 φ имеет 6 полюсов статора и 8 полюсов ротора. Ротор представляет собой плоское ферритовое кольцо, намагниченное восемью намагниченными в осевом направлении чередующимися полюсами. Мы не показываем, что ротор закрыт пластиной из мягкой стали для крепления к подшипнику в середине статора.
Стальная пластина также помогает завершить магнитную цепь. Полюса статора также установлены на стальной пластине, что помогает замкнуть магнитную цепь.
Катушки плоского статора имеют трапециевидную форму, чтобы плотнее прилегать к катушкам и приблизительно равняться полюсам ротора. Катушки с шестью статорами содержат три фазы обмотки.
Если бы три фазы статора были последовательно запитаны, возникло бы вращающееся магнитное поле.
Ротор с постоянным магнитом будет таким же, как и в случае синхронного двигателя. Двухполюсный ротор будет следовать за этим полем с той же скоростью, что и вращающееся поле. Однако наш 8-полюсный ротор будет вращаться с кратной этой скоростью из-за дополнительных полюсов в роторе.
Бесщеточный двигатель вентилятора постоянного тока имеет следующие особенности:

Бесщеточный двигатель вентилятора, 2-φ
- Статор имеет 2 фазы, распределенные между 4 полюсами.
- Имеются 4-выступающие полюса без обмоток, чтобы исключить точки нулевого крутящего момента.
- У ротора четыре главных полюса привода.
- Ротор имеет 8-полюсные наложенные друг на друга полюса, что позволяет избежать точек нулевого крутящего момента.
- Датчики на эффекте Холла расположены под физическим углом 45 °.
- Корпус вентилятора размещается на роторе, который размещается над статором.
Целью бесщеточного двигателя вентилятора является минимизация стоимости производства. Это стимул для перехода продуктов с более низкими характеристиками из конфигурации 3-φ в конфигурацию 2-φ. В зависимости от того, как он приводится в движение, его можно назвать 4-фазным двигателем.
Вы можете вспомнить, что обычные двигатели постоянного тока не могут иметь четное количество полюсов якоря (2, 4 и т. Д.), Если они должны быть самозапускающимися, обычно 3, 5, 7. Таким образом, гипотетический 4-полюсный двигатель может остановиться при минимальном крутящем моменте, когда он не может быть запущен из состояния покоя.
Добавление четырех небольших выступающих полюсов без обмоток накладывает пульсацию крутящего момента на кривую зависимости крутящего момента от положения. Когда этот пульсирующий крутящий момент добавляется к нормальной кривой крутящего момента под напряжением, в результате минимумы крутящего момента частично удаляются.
Это позволяет запускать двигатель во всех возможных положениях остановки. Добавление восьми полюсов постоянного магнита к обычному 4-полюсному ротору с постоянными магнитами накладывает небольшой пульсирующий момент второй гармоники на нормальный 4-полюсный пульсирующий момент.
Это дополнительно устраняет минимумы крутящего момента. Пока минимальный крутящий момент не упадет до нуля, мы сможем запустить двигатель. Чем успешнее мы удаляем минимумы крутящего момента, тем легче запускается двигатель.
Для статора 2-φ требуется, чтобы датчики Холла были разнесены на 90 ° . электрические. Если бы ротор был двухполюсным, датчики Холла были бы расположены под углом 90 ° физический. Поскольку у нас 4-полюсный ротор с постоянными магнитами, датчики должны быть размещены под углом 45 ° физический, чтобы достичь 90 ° электрическое расстояние. (Обратите внимание на расстояние между холлами выше.)
Большая часть крутящего момента возникает из-за взаимодействия внутренних катушек 2-φ статора с 4-полюсной секцией ротора. Кроме того, 4-полюсная секция ротора должна быть внизу, чтобы датчики Холла воспринимали правильные сигналы коммутации.
8-полюсная роторная секция предназначена только для улучшения запуска двигателя.

Двухтактный бесщеточный двигатель постоянного тока, двухтактный
На рисунке выше двухтактный привод 2-φ (также известный как привод 4-φ) использует два датчика Холла для управления четырьмя обмотками. Датчики разнесены на 90 ° электрические, что составляет 90 ° физический для однополюсного ротора.
Поскольку датчик Холла имеет два дополнительных выхода, один датчик обеспечивает коммутацию двух противоположных обмоток.
Промышленные технологии
- Коллекторные двигатели переменного тока
- Nanotec:компактный контроллер двигателя для бесщеточных двигателей постоянного тока и шаговых двигателей
- Как устранить неполадки двигателей с фазным ротором
- Совет по электродвигателям:минимизируйте количество запусков
- Технический совет:двигатели
- Безопасность электродвигателя:различные фазы и меры безопасности
- 4 основных вида отказов обмотки в электродвигателях переменного тока
- О промышленных двигателях и приложениях
- Двигатели и автоматика BLDC
- Введение в двигатель BLDC