


Изобилие вариантов при выборе датчика для обратной связи двигателя
Во многих приложениях управления движением необходимо знать положение, скорость и, возможно, даже ускорение ротора двигателя или его нагрузки. В зависимости от особенностей применения и конструкции контроллеру мотора может потребоваться знать эти параметры точно, приблизительно или вообще не знать. Зная состояние двигателя и состояние ротора, контроллер двигателя использует сценарий с обратной связью (рис. 1).
Конечно, скорость, положение и ускорение двигателя тесно связаны. Поскольку скорость — это производная (скорость изменения во времени) положения, а ускорение — производная от скорости, можно определить все три фактора, даже зная только один из них (также обратите внимание на дополнение:скорость — это интеграл ускорения и позиция является интегралом скорости).

Однако на практике этот метод определения сопутствующих параметров часто (но не всегда) оказывается неадекватным из-за разрешения и шума. Например, знание того, что ротор совершил еще один оборот, говорит вам обо всех трех переменных, но с очень низким и обычно неприемлемым разрешением. В зависимости от приложения требуемые разрешение и точность могут варьироваться от грубого до умеренного и точного. Станку с ЧПУ нужна точная информация о роторе, контроллер автомобильного стеклоподъемника может принимать приблизительные данные, а стиральная машина или сушилка будут довольствоваться лишь приблизительной информацией.
Замыкание цикла
Для определения положения или движения ротора наиболее распространенными вариантами являются резольверы, оптические или емкостные энкодеры и устройства на эффекте Холла, примерно в порядке убывания точности, разрешения и стоимости. Эти датчики сильно различаются по своей физической конструкции, реализации и электрическому интерфейсу, поэтому пользователи должны понимать, что им нужно, какой выбор лучше всего подходит для данного приложения и как они будут соединять датчик со схемой контроллера.
Инкрементальные энкодеры, используемые, когда требуется только относительное положение или вопрос стоимости, обычно используются с асинхронными двигателями переменного тока. Напротив, абсолютные энкодеры, которые дают разные двоичные выходные данные для каждого положения, поэтому положение вала абсолютно определено, часто используются в сочетании с бесщеточными двигателями с постоянными магнитами в сервоприложениях. Приложение, конечно же, является основным фактором, определяющим, требуется ли дополнительная или абсолютная информация.
Хотя большая часть управления двигателем в настоящее время осуществляется с помощью цифрового контура управления, сам сигнал датчика либо полностью аналоговый и должен быть оцифрован, либо представляет собой цифровой сигнал, но с напряжениями и другими атрибутами, которые делают его несовместимым со стандартной цифровой схемой. Хотя некоторые датчики обратной связи предлагаются с необработанными выходными данными, которые можно настроить по своему усмотрению, многие из них также имеют кондиционированные, готовые к интерфейсу выходные данные, совместимые со стандартными портами ввода-вывода, форматами и протоколами.
Хотя большее разрешение может показаться хорошей идеей, на практике это может быть не так. Избыток такого, казалось бы, хорошего свойства, как разрешение, может замедлить работу системы, требуя дополнительной обработки ненужной или полезной информации, поэтому хорошей идеей будет ограничение разрешения до необходимого минимума.
Резолверы
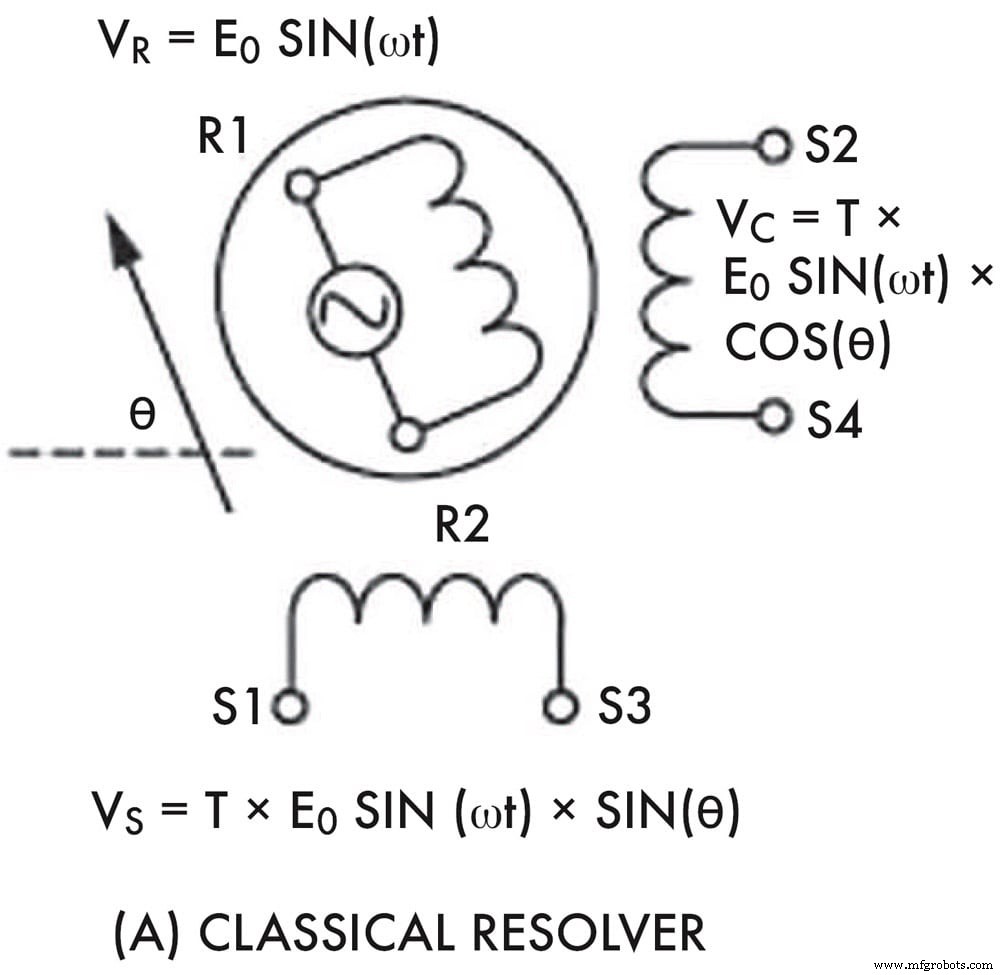
Резольверы — чрезвычайно точные, прочные и абсолютные датчики положения. Они основаны на фундаментальных принципах трансформатора с одной первичной обмоткой и двумя вторичными обмотками, которые ориентированы под углом 90° друг к другу (рис. 2). Эффективное соотношение витков и полярность между первичной и вторичной обмотками варьируются в зависимости от угла наклона вала. Первичная обмотка возбуждается эталонным сигналом переменного тока с постоянной частотой, которая может находиться в диапазоне от 50 Гц/60 Гц до нескольких сотен кГц, а выходы вторичных обмоток будут не в фазе из-за их физического расположения. Пиковые напряжения вторичных обмоток будут изменяться по мере вращения вала и будут пропорциональны углу вала. Путем демодуляции этих выходных сигналов с использованием первичного сигнала в качестве эталона схема резольвера может обеспечивать считывание угла наклона вала с высоким разрешением.
Резольвер не только точен, но и прочен. У резольверов нет физического контакта между первичной и вторичной сторонами, нет отдельных щеток или подшипников в дополнение к тем, которые находятся в самом двигателе, нет точек трения, которые могут привести к износу деталей, и нет возможности для загрязняющих веществ (таких как масло) мешать работе. операционная. Резольверы широко используются в чрезвычайно сложных ситуациях, таких как измерение углов в военном оружии, из-за их механической прочности и производительности.
Однако резольверы, как правило, большие и относительно дорогие по сравнению с альтернативными вариантами и требуют относительно большого количества энергии, что часто неприемлемо в приложениях с низким энергопотреблением. Они также требуют относительно сложной схемы для генерации и демодуляции сигналов переменного тока, хотя это гораздо меньше препятствий для современных ИС. Они обеспечивают индикацию абсолютного положения при включении питания и не требуют каких-либо движений для индексации или определения начального угла. Эта функция обязательна в одних ситуациях и не имеет значения в других.
Кодирование позиции, а не данных

Оптический энкодер (термин энкодер здесь не связан с кодированием цифровых данных) при инкрементальном считывании положения использует источник света (светодиод), два фотодатчика в квадратуре и стеклянный или пластиковый диск между ними (рис. 3). На диске есть тонкие выгравированные линии, расходящиеся от его центра, и по мере его вращения датчики видят узоры из света и тьмы.
Количество строк на диске и некоторые другие методы определяют разрешение, которое обычно составляет 1024, 2048 или даже 4096 отсчетов за оборот. В отличие от резольвера, похожего на трансформатор, оптический энкодер не был устройством массового рынка до тех пор, пока не были разработаны долговечные светодиоды и эффективные фотодатчики.
Физическое расположение датчиков позволяет энкодеру определять направление вращения. Базовая схема преобразует последовательности импульсов от двух датчиков (называемых выходами A/B) в пару битовых потоков, указывающих как движение, так и направление (рис. 4).

Энкодер является инкрементным, а не абсолютным индикатором движения. Для определения абсолютного положения большинство энкодеров добавляют третью дорожку и фотодатчик в качестве нулевой опорной дорожки индикатора; вал должен вращаться достаточно, чтобы пройти нулевое исходное положение, чтобы это подавало сигнал. Считывание истинного относительного положения может быть добавлено к оптическому энкодеру, но это усложняет устройство.
Оптические энкодеры обеспечивают очень хорошее разрешение, но они не так надежны, как резольверы. Грязь может помешать оптическому тракту, и диск энкодера может загрязниться. Однако их производительность более чем достаточна для многих приложений, они компактны, легки, маломощны, просты в интерфейсе и недороги.
Типичными оптическими энкодерами для двигателей и вращений являются аналогичные двухканальные модули HEDS-9000 и HEDS-9100 от Avago Technologies (Broadcom). Эти высокопроизводительные и недорогие модули состоят из светодиодного источника с линзой и интегральной схемы детектора, заключенных в небольшой С-образный пластиковый корпус, а также электроники привода и интерфейса (рис. 5). Они имеют сильно коллимированный источник света и специальное физическое расположение фотодетектора, поэтому они очень устойчивы к смещению установки. (Диск, называемый кодовым колесом, приобретается отдельно, с разрешением 500 CPR и 1000 CPR для HEDS-9000 и между 96 CPR и 512 CPR для HEDS-9100. Модули обеспечивают два канала TTL-совместимых A и B цифровых выходов и требуют одного источника питания 5 В.)

Серия CUI AMT10 представляет собой альтернативу оптическому энкодеру, основанную на емкостных принципах вместо оптических (рис. 6). Эти энкодеры предлагают ряд прочных, высокоточных модульных блоков, доступных в инкрементальной и абсолютной версиях, с разрешением до 12 бит (4096 отсчетов), выбираемым пользователем из 16 значений с помощью четырехпозиционного двойного входа. линейный пакет (DIP) переключатель. Квадратурные выходы A/B этих устройств, совместимые с комплементарными оксидами металлов и полупроводниками (CMOS), передаются через стандартный последовательный периферийный интерфейс (SPI).

В отличие от оптических энкодеров, в устройствах CUI AMT используется повторяющийся выгравированный рисунок проводников на подвижных и неподвижных частях энкодера. По мере вращения энкодера относительная емкость между двумя частями увеличивается и уменьшается, и это изменение емкости ощущается, что в некоторой степени аналогично выходным сигналам фототранзисторов в оптическом энкодере. Грязь и другие загрязняющие вещества не оказывают здесь большого вредного воздействия.
Имейте в виду, что резольвер или энкодер также является механическим устройством, требующим соблюдения требований по монтажу и электрической совместимости. Чтобы свести к минимуму проблемы со складированием и инвентаризацией, CUI предлагает серию AMT10 с широким ассортиментом втулок, крышек и монтажных оснований, поэтому один и тот же базовый энкодер можно использовать с широким диапазоном диаметров валов и установок.
Резольверы и энкодеры могут производить базовые показания с разрешением до 1/100 градуса (0,6 угловой минуты) или лучше, но точность не совпадает с разрешением (опять же, некоторые приложения больше озабочены одним из них, чем другим). . Независимо от того, используется ли в проекте резольвер или энкодер, источники ошибок возникают из-за температуры, скорости отслеживания изменений, нежелательных фазовых сдвигов и других факторов. Однако поставщики этих устройств разработали способы устранения, устранения или компенсации многих из этих недостатков, часто с помощью схемы на основе ИС между необработанным выходным сигналом датчика и подготовленным выходным сигналом, поступающим на системный контроллер.
Устройства с эффектом Холла зарекомендовали себя
Другой класс кодирующих или сенсорных устройств также основан на устаревшем принципе, который требует, чтобы современная полупроводниковая электроника и упаковка стали широко доступными, доступными и эффективными. Кроме того, критически важная схема интерфейса, которая может использовать минимальное напряжение и легко связывать его с системой, теперь доступна на кристалле, что еще больше упрощает использование этой технологии. Устройства на эффекте Холла можно использовать для определения протекания тока через проводник, являющийся частью датчика, а также для определения наличия или отсутствия поблизости магнитного поля.

То, что мы знаем как эффект Холла, было открыто Эдвином Холлом в 1879 году; разность потенциалов — напряжение Холла — создается на электрическом проводнике под прямым углом к электрическому току в проводнике и магнитном поле, перпендикулярном току (рис. 7).
Некоторые датчики на эффекте Холла выходят далеко за рамки включения только самого чувствительного элемента. Трехосевой датчик положения Melexis MLX90367 представляет собой монолитную ИС абсолютного датчика, чувствительную к плотности потока, приложенного ортогонально и параллельно поверхности ИС. Он чувствителен к трем компонентам плотности потока, что позволяет MLX90367 (с правильной магнитной цепью) декодировать абсолютное положение любого движущегося магнита (например, поворотное положение от 0 до 360°).

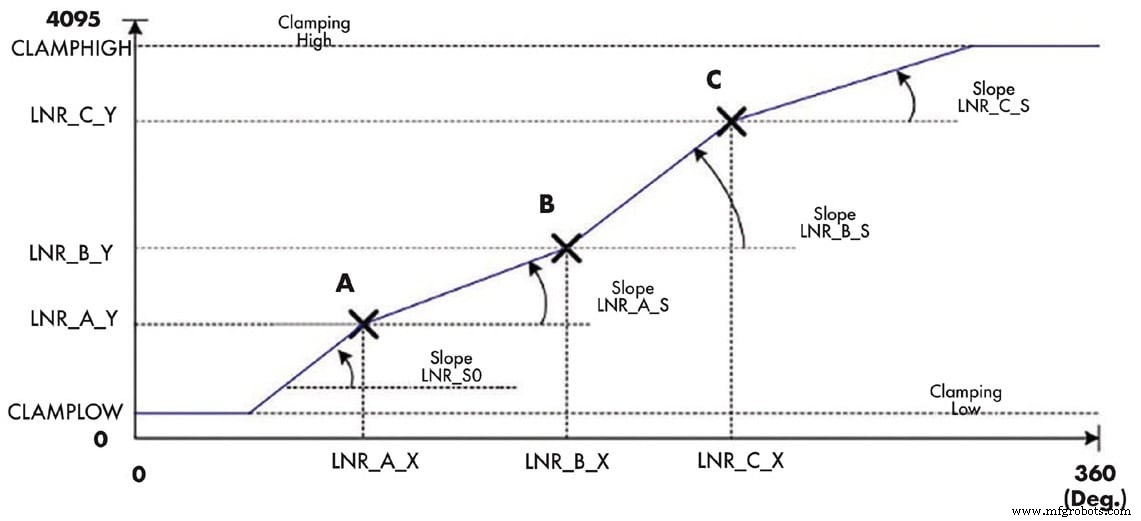
Внутри это устройство с 12-разрядным разрешением включает в себя встроенную обработку сигналов с микроконтроллером и цифровым сигнальным процессором (рис. 8), поэтому оно может выполнять необходимые вычисления, а также корректировать присущие нелинейности и многое другое (рис. 9). Он также поддерживает широкий спектр выбираемых пользователем функций, функций и различных выходных форматов, включая расширенный формат со встроенной коррекцией ошибок под названием SENT (SAE J2716-2010), который широко используется в автомобильных приложениях.
В большинстве магнитных энкодеров на эффекте Холла используется колесо, прикрепленное к валу двигателя, и колесо имеет набор намагниченных северного и южного полюсов по периметру; это магнитная аналогия шлицевому колесу оптического энкодера. Колесо обычно изготавливается из литого под давлением феррита, встроенного в массив полюсов. Типичное колесо намагничено 32 полюсами (16 северных и 16 южных), поэтому разрешение намного меньше, чем у оптического энкодера или резольвера, но часто достаточно для многих ситуаций. Типичная установка имеет три датчика Холла, электрически разнесенные на 120° друг от друга, для определения коммутации колеса.
Обзор
Разработчики, которые должны определять положение двигателя, скорость или ускорение, имеют широкий спектр опций, охватывающих многие ключевые параметры и атрибуты производительности. Резольверы, оптические и емкостные энкодеры, а также устройства на эффекте Холла имеют долгую и проверенную репутацию, а также обширную поддержку с помощью ноу-хау приложений.
Выбор может быть обусловлен одним решающим фактором, например надежностью или низким энергопотреблением, или традиционным и привычным использованием в данной ситуации. После того, как будет определено, какая базовая технология будет использоваться, станет доступно множество жизнеспособных поставщиков и деталей от каждого из них, поэтому решение о конкретном устройстве может потребовать некоторых исследований, чтобы лучше понять компромиссы.
Эта статья была написана Биллом Швебером для Mouser Electronics, Мэнсфилд, Техас. Для получения дополнительной информации посетите здесь .
Датчик
- Renesas расширяет возможности микроконтроллера для сервоуправления в промышленных роботах
- Индуктивный датчик положения для промышленных двигателей обеспечивает высокую скорость и точность
- 5 вопросов, которые следует задать при выборе материалов для современных продуктов
- Сверхчувствительный и надежный датчик для смарт-текстиля
- Носимый датчик газа для мониторинга здоровья и окружающей среды
- Миниатюрный беспроводной датчик кислорода для больных младенцев
- Мягкий датчик повышает чувствительность кончиков пальцев роботов
- Ультратонкий сенсор для умных контактных линз
- Индуктивный бесконтактный датчик положения
- Сенсорная пленка для аэрокосмической отрасли