


Разработка системы обратной связи с быстрым откликом для миниатюрных конструкций с моторным приводом
Информация о вращении двигателя, такая как положение, скорость и направление, должна быть точной, чтобы производить точные драйверы и контроллеры для самых разнообразных новых приложений - например, в машинах для захвата и размещения, в которых микроскопические компоненты устанавливаются на печатной плате ограниченного объема. (PCB) площадь. Недавно органы управления двигателями были миниатюризированы, что позволило найти новые приложения в хирургической робототехнике для здравоохранения и в дронах для аэрокосмической и оборонной промышленности. Контроллеры двигателей меньшего размера также позволяют находить новые применения в промышленных и коммерческих установках. Задача разработчиков состоит в том, чтобы удовлетворить требования высокой точности датчика обратной связи по положению в высокоскоростном приложении, в то же время внедрив все компоненты в ограниченное пространство на печатной плате, чтобы их можно было разместить внутри крошечных корпусов, таких как роботизированная рука.
щелкните, чтобы увеличить изображение
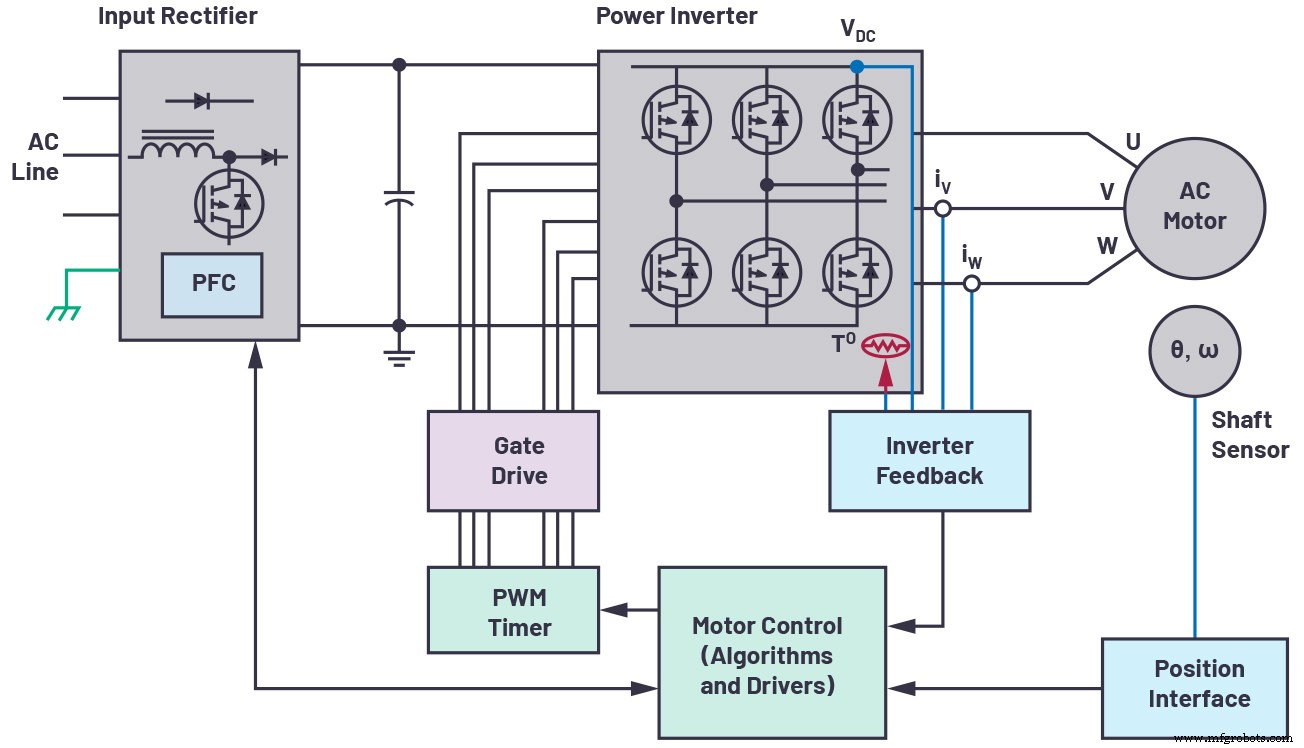
Рисунок 1. Замкнутая система обратной связи управления двигателем. (Источник:Analog Devices, Inc.)
Управление двигателем
Контуры управления двигателем, как показано на рисунке 1, в основном состоят из двигателя, контроллера и интерфейса с обратной связью по положению. Двигатель вращает вращающийся вал, который заставляет руки машины двигаться соответственно. Контроллер мотора сообщает мотору, когда применить силу, остановить или продолжить вращение. Интерфейс положения в контуре предоставляет контроллеру информацию о скорости вращения и положении. Эти данные имеют решающее значение для правильной работы механизма для сборки крошечной печатной платы для поверхностного монтажа. Все эти приложения требуют точной информации об измерении положения вращающегося объекта.
Разрешение датчика положения должно быть очень высоким - достаточным для точного определения положения вала двигателя, правильного захвата крошечного компонента и его точного размещения на плате. Кроме того, более высокие скорости вращения двигателя приводят к более высокой пропускной способности контура и меньшим требованиям к задержке.
Система обратной связи по положению
В приложении более низкого уровня для определения положения может быть достаточно инкрементного датчика вместе с компаратором, в то время как приложение более высокого уровня потребует более сложных сигнальных цепей. Эти системы обратной связи включают датчик положения, за которым следует аналоговое преобразование входного сигнала, аналого-цифровой преобразователь (АЦП) и его драйвер до того, как данные попадут в цифровую область.
Один из самых точных датчиков положения - оптический энкодер. Оптический кодировщик состоит из светоизлучающего диода (LED) источника света, маркированного диска, прикрепленного к валу двигателя, и фотодетектора. Диск имеет замаскированный узор из непрозрачных и прозрачных областей, которые закрывают свет или позволяют ему проходить. Фотодетекторы воспринимают возникающий свет, а световые сигналы включения / выключения преобразуются в электрические сигналы.
Когда диск вращается, фотодетекторы вместе с узорами на диске вырабатывают небольшие синусоидальные и косинусоидальные сигналы на уровне мВ или мкВ. Эта система типична для оптических энкодеров абсолютного положения. Эти сигналы подаются на схему преобразования аналогового сигнала, обычно состоящую из дискретного усилителя или аналогового усилителя с программируемым усилением (PGA) для усиления сигнала с размахом до 1 В - обычно для соответствия диапазону входного напряжения АЦП. для максимального динамического диапазона. Затем каждый из усиленных синусоидальных и косинусоидальных сигналов регистрируется драйверным усилителем АЦП с одновременной дискретизацией.
АЦП должен иметь возможность одновременной выборки на своих каналах, чтобы точки данных синуса и косинуса брались в один и тот же момент времени, поскольку эта комбинация предоставляет информацию о положении вала. Результаты преобразования АЦП передаются в специализированную интегральную схему (ASIC) или микроконтроллер. Контроллер мотора запрашивает положение энкодера в каждом цикле широтно-импульсной модуляции (ШИМ) и использует эти данные для управления двигателем на основе команд, которые он получает. Раньше разработчикам систем приходилось менять скорость АЦП или количество каналов, чтобы соответствовать ограниченным размерам платы.
щелкните, чтобы увеличить изображение
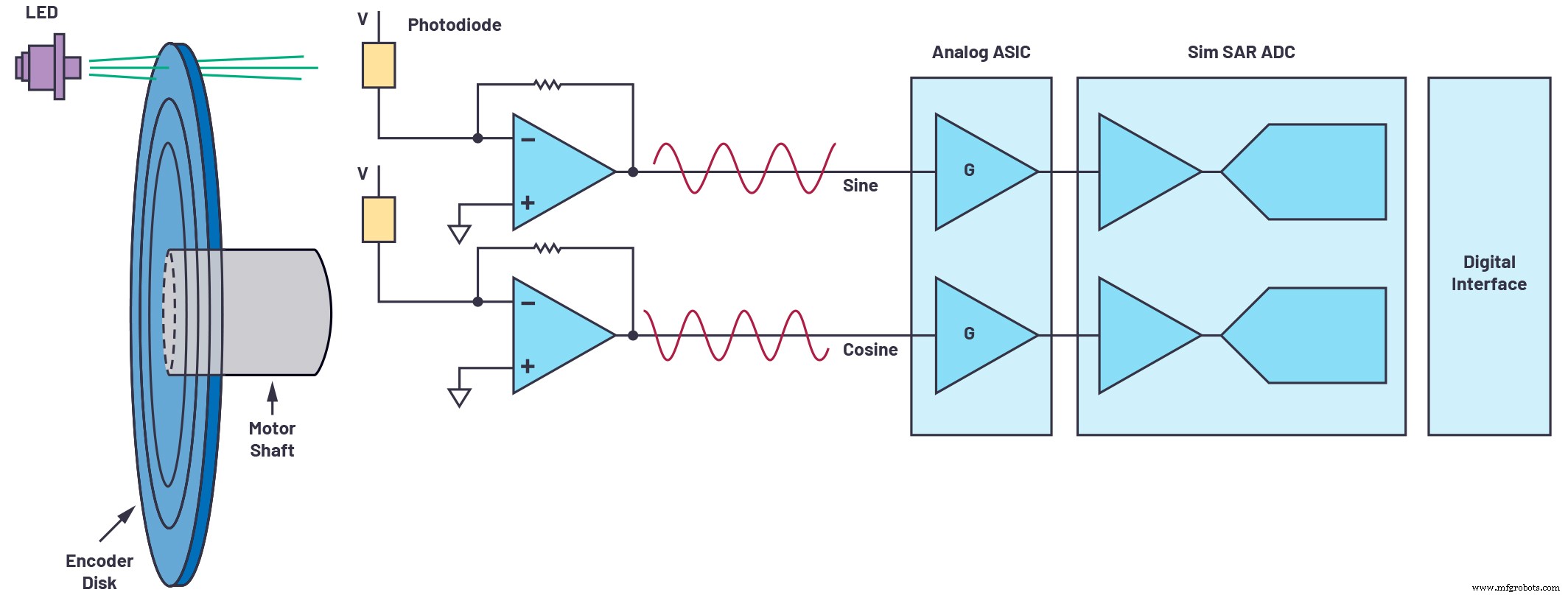
Рисунок 2. Система обратной связи по положению. (Источник:Analog Devices, Inc.)
Оптимизация обратной связи
Требования развивающейся технологии привели к инновациям в приложениях для управления двигателями, которые требуют высокоточного определения положения. Разрешение оптического кодировщика может быть основано на количестве слотов, записанных на тонкой литографии на диске, обычно это сотни или тысячи.
Интерполяция этих синусоидальных и косинусных сигналов в высокоскоростной высокопроизводительный АЦП позволит нам создавать кодеры с более высоким разрешением, не требуя системных изменений на диске кодировщика. Например, когда синусоидальный и косинусоидальный сигнал кодирующего устройства дискретизируются с более медленной частотой, регистрируется меньшее количество значений сигнала, как показано на рисунке 3; это также ограничивает точность ограничения позиции.
щелкните, чтобы увеличить изображение
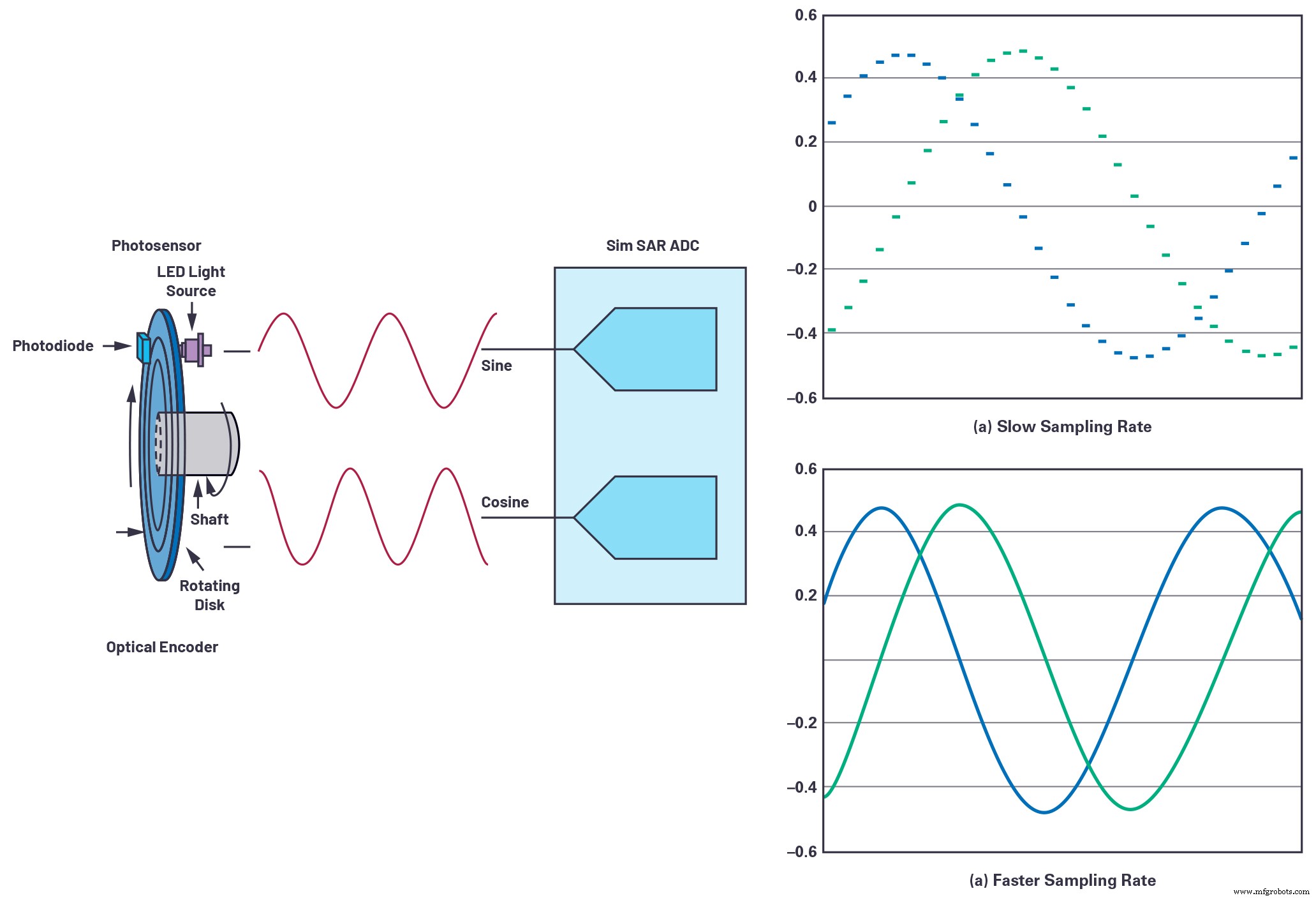
Рисунок 3. Частота дискретизации. (Источник:Analog Devices, Inc.)
На рисунке 3, когда АЦП производит выборку с большей скоростью, фиксируются более подробные значения сигнала и определяется положение с более высокой точностью. Высокая частота дискретизации АЦП позволяет передискретизировать, дополнительно улучшая шумовые характеристики, устраняя некоторые потребности цифровой постобработки. В то же время он снижает скорость передачи данных на выходе АЦП; то есть, допуская более медленные сигналы последовательной частоты, следовательно, упрощая цифровой интерфейс. Система обратной связи по положению двигателя смонтирована в блоке двигателя, который в некоторых случаях может быть довольно маленьким. Поэтому размер имеет жизненно важное значение, чтобы поместиться в ограниченную область печатной платы модуля кодировщика. Компоненты с несколькими каналами в одном крошечном корпусе лучше всего подходят для экономии места.
Пример конструкции обратной связи по положению оптического кодировщика
Пример оптимизированной системы обратной связи по положению оптического энкодера показан на рисунке 4. Схема может быть подключена к оптическому энкодеру абсолютного типа, где дифференциальные синусоидальные и косинусоидальные сигналы от энкодера могут быть захвачены схемой. На рисунке 4 показан входной двухканальный полностью дифференциальный усилитель ADA4940-2, управляющий АЦП, в данном случае AD7380, двухканальный, 16-разрядный, полностью дифференциальный, 4 MSPS, АЦП последовательного приближения с одновременной выборкой, размещенный в небольшой корпус LFCSP размером 3 мм × 3 мм.
щелкните, чтобы увеличить изображение
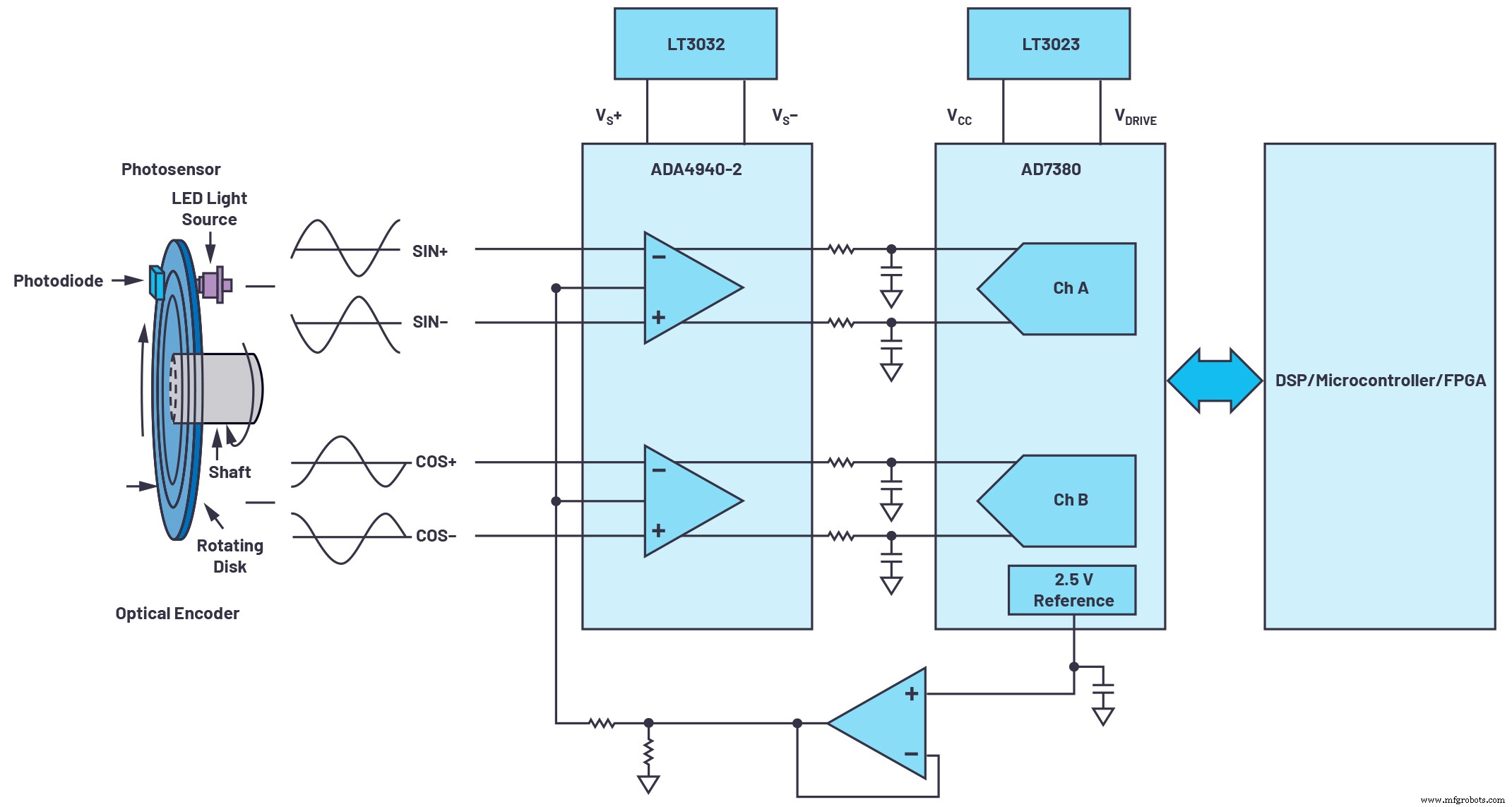
Рисунок 4. Оптимизированная конструкция системы обратной связи. (Источник:Analog Devices, Inc.)
Встроенный источник опорного напряжения 2,5 В обеспечивает минимальные требования к компонентам для этой схемы. VCC и VDRIVE АЦП и шины питания драйвера усилителя могут получать питание от стабилизатора LDO, такого как LT3023 и LT3032. Когда эти эталонные конструкции сопрягаются - например, с оптическим кодировщиком на 1024 слота, который производит 1024 цикла синуса и косинуса за один оборот диска кодера, - 16-битный AD7380 выбирает каждый слот кодера с 216 кодами, в целом увеличивая кодер. разрешение до 26 бит.
Пропускная способность 4 MSPS обеспечивает регистрацию подробных синусоидальных и косинусных циклов и актуальность позиций энкодера. Высокая пропускная способность обеспечивает передискретизацию на кристалле, что сокращает временные затраты цифровых ASIC или микроконтроллеров, передающих точное положение энкодера в двигатель. Передискретизация на кристалле позволяет получить дополнительные 2 бита разрешения, которые можно использовать с функцией повышения разрешения на кристалле. Повышение разрешения может еще больше повысить точность до 28 бит.
Системы управления двигателем требуют более высокой точности, более высокой скорости и миниатюризации. Оптические энкодеры используются в качестве датчиков положения двигателя. Для этого сигнальная цепь оптического энкодера должна иметь высокий уровень точности при измерении положения двигателя. Высокоскоростной АЦП с высокой пропускной способностью точно собирает информацию и передает данные о положении двигателя в контроллер, обеспечивая более высокий уровень точности и оптимизацию системы обратной связи по положению.
Об авторе
Датчик
- Миниатюрный беспроводной датчик кислорода для больных младенцев
- Умные системы управления освещением для теплиц снижают затраты
- Технология зажигания для электрических движителей
- Двигатель для гиперзвукового полета
- Разработка интеллектуальных решений для устройств измерения расхода газа
- Система калибровки для автоматической укладки волокна
- Вопросы и ответы:Оптимизация литий-ионных аккумуляторов для сверхбыстрой зарядки
- Разработка передовых ИК-оптических сборок для БПЛА
- Система обнаружения химических веществ для низких уровней концентрации
- 3D-система отслеживания движения для автономных технологий