


Обратная кинематика в робототехнике:что нужно знать
Что такое инверсная кинематика?
Что вам нужно знать об этом, чтобы получить максимальную отдачу от вашего робота?
Инверсная кинематика для робототехники – обширная и зачастую сложная тема. В зависимости от вашего проекта вам может понадобиться узнать о нем очень подробно или обойтись базовыми знаниями.
Вот основная информация, которую вам необходимо знать об инверсной кинематике для робототехники.
Что такое инверсная кинематика?
Инверсная кинематика — это математический процесс, используемый для расчета положений суставов, необходимых для размещения концевого эффектора робота в определенном положении и ориентации (также известной как «поза»). Надежное инверсное кинематическое решение необходимо для программирования робота для выполнения задач.
Важно понимать разницу между инверсной кинематикой и прямой кинематикой робота.
Прямая кинематика определяет, где будет находиться концевой эффектор, если суставы установлены в определенное положение. Существует только одно решение прямого кинематического уравнения. Когда шарниры установлены в определенное положение, концевой эффектор всегда оказывается в одном и том же месте.
В инверсной кинематике часто существует несколько различных решений и несколько подходов к вычислению инверсной кинематики.
Зачем нам нужна инверсная кинематика в робототехнике
Если бы у нас не было инверсной кинематики, программирование роботов было бы крайне сложно… если вообще возможно.
Если вы хотите, чтобы концевой эффектор вашего робота переместился в определенное место в его рабочей области, имеет смысл ввести желаемую позу в программу.
Но вы не можете просто сказать роботу перейти к нужным вам X, Y и Z. координаты и ожидайте, что робот поймет ваши инструкции... не без инверсной кинематики.
Большинство промышленных роботов состоят из нескольких независимо управляемых шарнирных соединений. Каждый сустав соединен с одним или несколькими другими суставами, иногда в сложных конфигурациях. Концевой эффектор крепится в конце всей «кинематической цепи». Когда вы перемещаете любой сустав, это по-разному влияет на положение исполнительного органа.
Это означает, что не существует простой прямой зависимости между положением конечного эффектора и каким-либо конкретным суставом.
Например, если вы хотите, чтобы концевой эффектор робота перемещался линейно на 1 мм вдоль оси Z, вам может потребоваться сместить все суставы на другую величину.
Наконец, алгоритмы обратной кинематики вычисляют точное положение каждого сустава робота, необходимое для достижения желаемого положения конечного эффектора.
Как найти инверсную кинематику руки робота
Когда вы проводите исследование инверсной кинематики для робототехники, вы часто будете находить страницы и страницы с уравнениями, формулами и описаниями алгоритмов. Это связано с тем, что расчет инверсной кинематики является хорошо зарекомендовавшей себя областью исследований в области робототехники. Мало кто говорит об инверсной кинематике вне исследовательской области (за исключением 3D-аниматоров).
Однако, когда мы используем роботов для промышленного применения, есть 2 основных варианта поиска решения инверсной кинематики:
- Вы можете самостоятельно выполнить всю математическую и программную работу, чтобы создать решатель обратной кинематики для конкретного робота.
- Вы можете использовать существующий решатель обратной кинематики для вашего конкретного робота, который работает "из коробки".
Какой из них вы выберете, зависит от вашей уникальной ситуации.
Если вы построили робота самостоятельно, т. е. построили его с нуля, соединив вместе двигатели и механические звенья, вам, скорее всего, придется выбрать вариант 1.
Если вы используете промышленного робота, предоставленного производителем роботов, вариант 2 почти всегда будет быстрее и проще.
Сложный метод:создание решателя обратной кинематики
Если вы решили создать свой собственный решатель обратной кинематики, приготовьтесь к серьезному программированию!
Существует 2 основных подхода к расчету инверсной кинематики:
1. Аналитические решения обратной кинематики
Аналитический инверсионный кинематический решатель сможет принять желаемую позу конечного эффектора и (почти) немедленно выдать требуемые положения суставов.
Это связано с тем, что «под капотом» кинематическая цепь робота была сведена к выражению замкнутой формы — для любой позы конечного эффектора существует математическое определение требуемых положений суставов.
Хотя вы можете выполнить работу по созданию выражения в закрытой форме самостоятельно (вручную), обычно в этом нет необходимости. В наши дни библиотека IKFast делает эту задачу намного проще, чем раньше.
2. Численные/итеративные кинематические решатели
Не все роботы имеют аналитическое инверсное кинематическое решение. Когда кинематическая структура робота сложна или необычна, единственным вариантом является использование числового решателя инверсной кинематики.
Более того, в численном решении нет четкого выражения в закрытой форме. Вместо этого, когда вы вводите желаемое положение конечного эффектора, итеративный алгоритм работает над решением для требуемых положений суставов, рассматривая его как решение оптимизации.
На каждой итерации алгоритм вводит некоторые положения суставов в прямое кинематическое уравнение робота, чтобы выяснить, где заканчивается рабочий орган. В следующей итерации он использует эту информацию для дальнейшей настройки положения суставов. Это будет постепенно перемещать концевой эффектор в нужное положение.
Из-за этого итеративного подхода численные решения инверсной кинематики выполняются медленнее, чем аналитические решения.
Простой метод:используйте проверенный решатель обратной кинематики
Создание собственного решателя обратной кинематики — хорошее интеллектуальное упражнение, когда вы учитесь в университете или создаете собственного робота с нуля.
Но если вы просто хотите использовать своего робота в производственной среде, вряд ли вам понадобится создавать собственный решатель инверсной кинематики.
Гораздо проще и быстрее просто использовать существующий решатель, который уже встроен в среду программирования вашего робота.
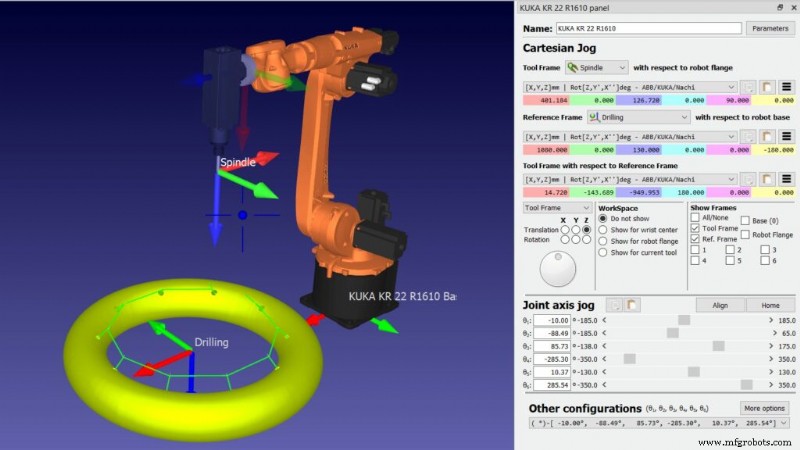
Все роботы в библиотеке роботов RoboDK имеют свои собственные решатели обратной кинематики. Это позволяет вам сразу начать программировать их, даже не задумываясь об этом.
Большинство наших решателей представляют собой предварительно созданные аналитические решения, которые поставляются в комплекте с файлом robot. Однако некоторые из более сложных роботов в библиотеке используют численные решатели. Даже с числовыми решателями снижение скорости вычислений не является проблемой для RoboDK, поскольку вы будете программировать своего робота в автономном режиме, прежде чем отправлять свою программу самому роботу.
В конце концов, создавайте свой собственный решатель обратной кинематики только в том случае, если это действительно необходимо.
В противном случае ваше время будет гораздо лучше потрачено на создание программы робота для вашей задачи и более быстрое внедрение ее в производство.
Какие у вас есть вопросы об инверсной кинематике в робототехнике? Сообщите нам в комментариях ниже или присоединитесь к обсуждению в LinkedIn, Twitter, Facebook, Instagram или на форуме RoboDK.
Промышленный робот
- Профилактическое обслуживание - что вам нужно знать
- Что нужно знать о сертификации CMMC
- Что нужно знать о сборке печатных плат
- Точная обработка металлов:что нужно знать
- Что нужно знать о процессе многослойного формования
- Что нужно знать об экспорте оборудования
- Двигатели переменного и постоянного тока:что вам нужно знать
- Что нужно знать о динамическом торможении
- Что нужно знать о гидравлических вспомогательных тормозах
- Что нужно знать о промышленных фрикционных материалах