


Сингулярность робототехники:что это такое в Robotic Arms
Источник:www. idtechex.com
Использование роботизированного оружия в обрабатывающей промышленности растет, и все больше компаний получают преимущества от использования роботизированного оружия. Если вы планируете внедрить роботизированное оружие в свои бизнес-процессы, вам необходимо убедиться, что вы хорошо информированы. Ищите качественного производителя роботизированной руки, с которым вы можете работать для получения качественных результатов.
Роботизированная рука имеет корпус, запястье, а также концевой эффектор. Конечный эффектор - это то, что используется для хранения различных продуктов или выполнения различных задач. В большинстве случаев вам потребуется, чтобы концевой эффектор перемещался в разных направлениях с высокой точностью. Здесь вам нужно убедиться, что вы знаете об особенностях робота и о том, как она влияет на производительность вашей роботизированной руки. В этой статье мы подробно рассмотрим особенности робота и то, почему так важно помнить об этом. Источник:www. technologyreview.com
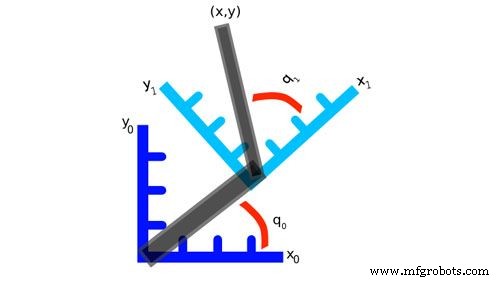
Уникальность робота относится к конфигурации, в которой движение конечного эффектора робота блокируется в определенных направлениях. Такая конфигурация приводит к ограничению эффективности и точности манипулятора, с которым вы работаете. Обычно, когда речь идет о 6-осевых роботизированных манипуляторах, они работают, перемещаясь относительно осей X, Y и Z в трехмерной или декартовой плоскости. Он состоит из 6 суставов, которые обеспечивают 6 степеней свободы, которые испытывает роботизированная рука во время работы.
Эта степень свободы позволяет манипулятору двигаться в разных направлениях и легко выполнять задачи, для которых он предназначен. Если по какой-либо причине рабочий орган робота не может добраться до продуктов или движется в неправильном направлении, здесь возникает проблема сингулярности. Некоторые особенности довольно легко идентифицировать и устранить, что позволяет вам вернуться к своему задания. Однако, с другой стороны, некоторым роботам будет труднее идентифицировать особенности, если не использовать сложные и длинные формулы. Источник:www. mecademic.com
Уникальность робота будет иметь различные эффекты, а также проблемы, особенно при выявлении конкретных проблем. Эти задачи различаются в зависимости от нескольких факторов, присущих роботизированной руке, с которой вы будете работать. Сложность и серьезность сингулярности, с которой сталкивается ваш робот, зависят от количества сочленений, типа робота (линейный или вращающийся) и геометрического расположения.
У промышленного робота-манипулятора есть два пространства, где им легко управлять. Обычно это суставное пространство и декартово пространство. Поскольку манипулятор работает в разных местах, вы обнаружите, что он будет иметь два набора команд перемещения в режиме позиционирования.
Когда дело доходит до команд суставных пространств, робот получит конкретные инструкции с желаемым набором суставных пространств. Затем он переместится, чтобы привести каждый сустав к предлагаемому положению сустава в линейном и синхронном переводе. С помощью декартовых пространственных команд предложение роботу будет содержать желаемую позу для конечного эффектора с определенным декартовым путем. Декартова траектория может быть линейной или круговой.
Для точного совмещения робота с декартовым шарниром и командами контроллер робота рассчитывает обратную кинематику положения и скорости робота. Это приводит к правильному расположению рабочего органа для выполнения поставленной задачи. Однако, если расчеты ошибочны, возникают особенности, когда вы обнаруживаете, что конечный эффектор расположен неточно. Это покажет вам конфигурации, которых следует избегать, чтобы проблемы сингулярности не мешали вашим процессам автоматизации. Источник:www. dignited.com
Следует избегать явных особенностей роботов любой ценой, чтобы ваша промышленная роботизированная рука могла наилучшим образом работать с желаемыми задачами. Узнав больше о функциях особенности робота, вы лучше поймете, почему вы должны стремиться избегать ее. Уникальность роботов в основном связана с двумя различными функциями. Источник:studywolf. wordpress.com
Рассмотрим двух декартовых роботов, которые используют свои конечные эффекторы в разных направлениях. Два робота имеют шестиосевое позиционирование со штабелями из трех ортогональных линейных направляющих и трех ступеней вращения. Когда используемый робот может удерживать оси и соединения там, где они должны быть, тогда ориентация концевого эффектора становится легкой.
Он может непрерывно использовать рабочий орган на траектории 6D в пределах своего рабочего пространства, сохраняя при этом точность и аккуратность. Однако, когда оси и шарниры совпадают, возникает особенность, и робот больше не может двигаться, имея в своем распоряжении 6 степеней свободы.
С этим роботом вы обнаружите, что он не может вращать свой конечный эффектор вокруг осей, которые совпадают с поворотными шарнирами. Такая особенность часто называется блокировкой карданного подвеса. Учитывая, что большинство сингулярностей решается с помощью уравнений, становится сложнее определить скорость определенных декартовых векторов. Когда возникает сингулярность, это мешает вам вычислить интенсивность в числах, связанных с представленными скоростями.
Возможность измерения скорости манипулятора-робота имеет важное значение для обеспечения безопасности. Столкнувшись с проблемой сингулярности, вы обнаружите, что она представляет большой риск для робототехники, даже если они еще не достигли этой точки. Это приводит к высокой скорости движения суставов, что может быть опасно, особенно если вы работаете с большими и быстрыми промышленными роботами. Вот почему так важно составить карту скоростей, с которыми вы работаете. Источник:Youtube
Когда дело доходит до сингулярности робота, она не только влияет на кинематику обратной скорости, но и сводится к кинематическим уравнениям обратного положения. При работе с промышленными роботами вы обнаружите, что у них есть уравнения и решения для различных положений суставов. Различные представленные решения тесно связаны с различными типами конфигурации.
Например, если ваш робот имеет 8 уникальных решений для положений суставов до положения конечного эффектора, он также будет иметь 8 различных типов конфигурации. Чтобы изменить тип конфигурации, вам придется пройти через особенность. Сингулярности - это границы, обнаруженные между 6D-объектами, представленными в декартовой рабочей области - типичного 6-осевого робота. Это ограничивает различные конфигурации, которые вы можете достичь, и границы рабочего пространства, доступные для вашего промышленного робота. Источник:блог. grabcad.com
Учитывая тот факт, что особенности роботов могут возникать в любом промышленном манипуляторе, с которым вы работаете, важно понимать, что существуют разные типы. Подобно тому, как роботизированная рука состоит из разных частей, особенности также влияют на эти разные части, что приводит к множеству проблем.
Здесь важно помнить о различных осях шарниров промышленных роботов-манипуляторов. Вы будете работать с 2 и 3, которые параллельны, 1 и 4, которые перпендикулярны 2 и 3, оси шарнира 5, перпендикулярному осям шарнира 4 и 6. Теперь, когда вы лучше понимаете, как различные оси и суставы, вы находитесь в лучшем месте для изучения типов сингулярности. Наиболее очевидные типы особенностей в вертикально шарнирной руке робота, которые следует учитывать, включают: Источник:сайты. google.com
Когда дело доходит до вертикально шарнирных манипуляторов с встроенными запястьями, они, как правило, имеют сингулярность запястья как наиболее распространенную проблему. Такая особенность возникает, когда оси шарниров 4 и 6 совпадают. Когда это происходит, запястье не может перемещать концевой эффектор в направлении оси сустава 5. Рассмотрим применение руки промышленного робота, которая работает точно.
Чтобы он проходил по линии через сингулярность, шарниры 4 и 6 должны быть одновременными и поворачиваться на 90 градусов. Это будет происходить в противоположных направлениях, чтобы гарантировать точность процесса. Это показывает, что пересечение сингулярности запястья возможно. Однако, как только вы доберетесь до сингулярности, конечный эффектор остается неподвижным, в то время как два сустава вращаются. Чтобы конечный эффектор пересек сингулярность, он должен сначала остановиться. Если бы он использовался, это снизило бы точность промышленного манипулятора во время работы. Существует множество решений проблемы сингулярности запястья, которые можно легко реализовать, чтобы исправить эту проблему. Источник:www. electronicsteacher.com
Второй тип особенности, с которой вы можете столкнуться при работе с вертикально шарнирно сочлененными роботизированными руками с прямыми запястьями, - это сингулярность локтя. В основном это происходит, когда центр запястья лежит в плоскости, проходящей через оси суставов 2 и 3. Центр запястья используется для обозначения точки, где пересекаются оси суставов 4, 5 и 6. В сингулярности локтя вы обнаружите, что рука полностью вытянута, а также могут иметь место случаи, когда она не может быть полностью сложена. Этот вид сингулярности в основном определяется осью и положением сустава 3. Сингулярность локтя также имеет несколько решений, которые могут помочь вам решить любые проблемы с производительностью, которые могут возникнуть с вашей роботизированной рукой. Этот тип сингулярности встречается довольно часто, и его легко предсказать, а также избежать. Источник:blenderartists. орг
Последняя особенность, с которой вы можете столкнуться, - это особенность плеча, которая возникает, когда центр запястья робота лежит на линии, проходящей через оси суставов 1 и 2. Эта особенность является самой сложной среди остальных, учитывая, что она не зависит от единое суставное положение. С особенностью плеча ограничение на движение в направлении оси сустава 2.
В приложении, чтобы робот мог следовать линии через сингулярность плеча, суставы 1 и 4 должны вращаться одновременно на угол 90 градусов. Это вращение, как и в сингулярности запястья, выполняется в противоположных направлениях, в то время как концевой эффектор остается постоянным. Как и в сингулярности запястья, движение через сингулярность плеча возможно, однако концевой эффектор должен остановиться, чтобы это стало возможным. Эта особенность также включает несколько решений, которые могут быть реализованы, чтобы гарантировать, что роботизированная рука снова будет работать наилучшим образом. Источник:www. istockphoto.com
Когда дело доходит до коллаборативных роботов, вы обнаружите, что оси суставов 2, 3 и 4 параллельны, ось сустава 1 пересекается и перпендикулярна осям сустава 2. Кроме того, он также имеет ось сустава 5, которая пересекается и перпендикулярна осям шарниров 4 и 6. Как и особенности шарнирных роботов, эти роботы также имеют разные решения относительно различных типов конфигурации. Типы особенностей, включенных в Коботов, включают:
Особенность запястья у этих роботов возникает, когда оси суставов 4 и 6 становятся параллельны. В этой ситуации вы можете обнаружить, что оси шарниров 2, 3, 4 и 5 могут перемещаться, в то время как концевой эффектор остается постоянным.
В этих роботах особенность локтя возникает, когда оси шарниров 2, 3 и 4 находятся в одной плоскости. Это значительно ограничивает движение концевого эффектора и, в свою очередь, влияет на производительность манипулятора.
Особенность плеча возникает, когда точка пересечения осей шарниров 5 и 6 лежит в плоскости, проходящей через оси шарниров 1 и 2. Здесь есть несколько решений, которые могут быть реализованы, чтобы исправить эту особенность и иметь рабочий промышленный робот. Источник:www. ennomotive.com
Уникальность роботов в различных эффектах влияет на производственные процессы, поэтому очень важно иметь способы их избежать. Учитывая, что у разных типов роботов особенности различаются в зависимости от типа робота, с которым вы работаете, базовое понимание того, как их избежать, гарантирует, что ваши процессы будут выполняться легко. Как правило, сингулярностей можно избежать, только убедившись, что ваши роботизированные ячейки спроектированы должным образом. Это также связано с дизайном переходной пластины, которую вы выбираете для своего конечного эффектора.
Например, если вы настроили свою роботизированную руку и неправильно назначили место выбора, соответствующее сингулярности запястья, то вы мало что можете сделать для решения проблемы. При этом остается только проверить, можно ли использовать позу в несингулярном приложении. Кроме того, сингулярностей можно избежать, добавив к инструменту небольшие углы. Это во многом помогает снизить вероятность того, что робот переместится в сингулярность. Это метод, который в основном используется техническими специалистами, которые разбираются в механике и могут настроить решения в своих интересах.
И, наконец, сингулярностей можно избежать, применив подход к программированию, а математика поможет вам обо всем позаботиться. При этом вы обнаружите, что количество осей значительно уменьшено, чтобы можно было избежать сингулярности. Это главным образом потому, что большее количество осей увеличивает вероятность возникновения сингулярностей. Помните, что особенности возникают, когда оси совпадают друг с другом, что блокирует движение роботизированных манипуляторов в определенных направлениях. Уменьшение количества осей также снижает вероятность их совмещения и возникновения блокировок.
Необычность роботов - серьезная проблема, с которой сталкиваются в различных промышленных применениях роботизированных манипуляторов и другого оборудования автоматизации. Самостоятельное решение этих проблем может оказаться затруднительным, поэтому вам следует избегать сингулярности робота. Однако, если вы столкнетесь с этой проблемой, вы можете найти решение или нанять опытного специалиста, который ее устранит.
В качестве альтернативы вы можете установить тесные рабочие отношения с известным производителем оборудования для автоматизации, который поможет вам, когда вы столкнетесь с любыми особенностями. Не торопитесь, чтобы убедиться, что ваше робототехническое оборудование хорошо работает, чтобы помочь вам полностью настроить его и извлечь выгоду из его использования для вашего бизнеса. 
Содержание
Что такое Robot Singularity

Что влияет на сингулярность роботов?
Функции Robot Singularity

Снижение сопоставления скорости
Ограниченные внутренние границы рабочей области
Типы сингулярности робота в роботе с вертикальным шарниром

Сингулярность запястья
Сингулярность локтя

Сингулярность плеча
Типы сингулярности в шестиосном коллаборативном роботе (коботе)

Сингулярность запястья
Сингулярность локтя
Сингулярность плеча
Как избежать сингулярности в робототехнике

Заключение
Промышленный робот
- Рабочий диапазон робота:что это такое?
- Различные степени свободы в роботизированном оружии:полное объяснение
- Робототехническое оружие в производстве и его преимущества
- Какие преимущества роботизированного оружия для людей?
- Что такое запястье робота:полное руководство
- Что такое роботизированная сварка? - Процесс и применение
- Что такое коботы?
- Робототехника с визуальным управлением
- Что такое роботизированная сварка? - Процесс и применение
- Что такое робот для напитков?