


Типы суставов роботов:подробное руководство
Источник:www. idtechex.com
Автоматизация в обрабатывающей промышленности быстро набирает обороты, поскольку все больше компаний используют робототехнику. Это объясняется преимуществами автоматизации в бизнесе и использованием более умных и интеллектуальных процессов. Вы получаете больше продукции, а также снижаете риск травм на производственном предприятии. Большинство предприятий склоняются к использованию роботизированных манипуляторов для выполнения задач по подбору и размещению, упаковке, покраске и сборке.
Источник:www. researchgate.net
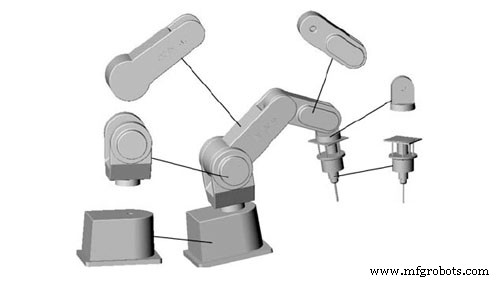
Под суставами робота понимаются подвижные компоненты робота, которые вызывают относительные движения между соседними звеньями. В этом контексте ссылки используются для обозначения жестких элементов, соединяющих суставы для четкого и адекватного функционирования. Это свидетельствует о том, что промышленный робот-манипулятор отличается использованием комбинации звеньев и шарниров для обеспечения оптимальной функциональности. Важно убедиться, что соединения на вашем манипуляторе работают соответствующим образом, чтобы обеспечить точность и аккуратность во время работы.
Роботизированные суставы также иногда называют осями. Они необходимы и пригодятся, чтобы гарантировать, что движение руки не будет ограничено или затруднено. Дополнительные сведения о роботизированных суставах помогут вам определить тип роботизированной руки, с которой вы хотите работать, в зависимости от задач, которые вы хотите решить. Источник:www. britannica.com
Учитывая, что в обрабатывающей промышленности используются разные типы роботов, вы также найдете множество механических соединений. Эти суставы различаются по движению и применению, особенно когда речь идет о типе используемого робота.
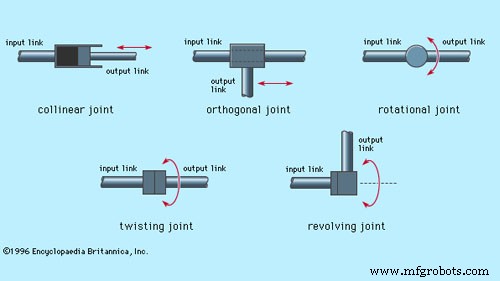
Когда дело доходит до механических соединений в роботизированных манипуляторах, необходимо учитывать пять основных типов. Два шарнира являются линейными, что означает, что относительное движение между соседними звеньями является поступательным. С другой стороны, остальные три являются вращающимися, что означает, что относительное движение звеньев включает вращения между ними. К пяти типам механических соединений для роботов относятся:
В линейных шарнирах относительное движение соседних звеньев должно быть параллельным. Это означает, что входные и выходные звенья скользят линейно. Такое движение приводит к поступательному движению. Такого рода линейное движение может быть достигнуто несколькими способами, включая использование телескопического механизма и поршня. Этот тип соединения также называют L-образным шарниром.
Ортогональные сочленения также обычно называют О-образными сочленениями. Они характеризуются относительным перемещением входного и выходного звеньев. Этот вид движения, связанный с ортогональными суставами, представляет собой поступательное скользящее движение. Однако, в отличие от линейного соединения, в случае ортогонального соединения выходное звено перпендикулярно входному звену.
Когда дело доходит до вращательных суставов, вы найдете использование вращательных относительных движений, которые пригодятся роботам-манипуляторам, работающим с несколькими рабочими пространствами. Эти движения осуществляются с осью вращения, перпендикулярной осям входного и выходного звеньев. Эти поворотные соединения также называются соединениями типа R.
Этот тип шарнира имеет вращательное движение, которое также приводит к некоторой степени вращения при использовании. Движение в этих шарнирах происходит относительно оси вращения, перпендикулярной осям входных и выходных звеньев. Скручивающие соединения также называются соединениями типа T.
В вращающихся шарнирах все немного иначе по сравнению с другими. Эти шарниры также имеют вращательное движение, которое может пригодиться в различных приложениях. Движение этих суставов представляет собой движение между двумя звеньями. Ось входного звена должна быть параллельна оси вращения шарнира. С другой стороны, ось выходного звена должна быть перпендикулярна оси вращения шарнира. Этот тип соединения также называется соединением типа V. Источник:www. technologyreview.com
В разных роботах будут использоваться разные типы механических соединений. Узнав больше о различных роботах, вы сможете лучше инвестировать в робота, который работает на вас. Вот некоторые из наиболее распространенных роботов:
Скорее всего, шарнирно-сочлененный робот будет иметь разные диапазоны и комбинации поворотных шарниров. Этот диапазон может включать простые 2-х суставные конструкции и переходить к более сложным структурам с 10 или более суставами. В этой конструкции рычаг соединяется с основанием с помощью поворотного шарнира, а звенья в рычаге соединяются поворотными соединениями.
В декартовых роботах в конструкции используются три линейных шарнира. Эти суставы представлены в декартовой плоскости, которая включает X, Y и Z. Эти роботы также могут иметь прикрепленное запястье с более легкими вращательными суставами для движения. Этот особый вид роботов также называют прямолинейными или портальными.
Цилиндрический робот оснащен поворотным шарниром, прикрепленным к основанию, и одним линейным шарниром, используемым для соединения различных звеньев. Поскольку цилиндрические роботы работают в пределах рабочей области цилиндрической формы, вращательное и линейное движение пригодятся для обеспечения точности.
В полярной конструкции роботов рука соединяется с основанием с помощью скручивающего соединения. Иногда вы также найдете использование комбинации двух поворотных шарниров и одного линейного шарнира. Поскольку этот робот также называется сферическим роботом, объем работ, который будет представлен, также будет сферическим. Оси, используемые в этом роботе, образуют полярную систему координат, которая позволяет манипулятору легко работать.
Робот SCARA - популярный вариант среди многих производителей, особенно среди тех, кто хочет автоматизировать свои сборочные процессы. Этот робот обычно имеет цилиндрическую форму и работает в относительно цилиндрическом рабочем объеме. В нем используются два параллельных шарнира, которые пригодятся в процессе сборки. Эти соединения обеспечивают податливость в одной выбранной плоскости во время использования робота.
Дельта-роботы спроектированы в виде паука, что позволяет им предлагать отличные услуги своим пользователям. Они построены из параллелограммов, которые соединены и соединены с общим основанием. Шарниры, представленные в этом типе роботов, являются как вращательными, так и линейными. Это позволяет роботу перемещать один конец инструмента в рабочей зоне куполообразной формы. Он повышает его производительность, чтобы обеспечить точное выполнение различных задач.
Работая с робототехникой как средством автоматизации различных процессов в вашем бизнесе, вы должны помнить о различных аспектах. Эти аспекты играют огромную роль в производительности конкретной робототехники, которую вы решите использовать. Когда дело доходит до использования промышленных роботов-манипуляторов, следует постоянно обновлять роботизированные суставы.
Узнайте о различных суставах и о том, как они влияют на работу робота. Это поможет вам определить, какие суставы лучше всего подходят для деятельности, которую вы хотите автоматизировать. Когда у вас это есть, вы можете инвестировать в роботы-манипуляторы, которые поставляются с суставами, которые вам нужны. Не торопитесь и поработайте с производителями оборудования для автоматизации, которые вам помогут. 
По мере того, как вы внедряете роботизированные руки в свой бизнес, убедитесь, что вы работаете с качественным производителем роботов-манипуляторов, который предложит вам самое лучшее. Кроме того, также важно иметь общее представление о том, что они влекут за собой. Роботизированная рука состоит из корпуса, запястья и концевого эффектора, которые выполняют определенные функции. Для точной работы этих различных частей необходимо наличие роботизированных суставов. В этой статье мы подробно рассмотрим различные роботизированные суставы, чтобы вы могли лучше понять их. Содержание
Что такое соединения роботов?
Типы механических соединений для роботов
Линейные соединения
Ортогональные соединения
Поворотные соединения
Скрученные соединения
Вращающиеся соединения
Различные типы роботов и используемые механические соединения

Сочлененный
Декартово
Цилиндрический
Полярный
SCARA
Дельта
Заключение
Промышленный робот
- Типы данных С++
- C Типы данных
- Разве SFM в обработке?
- Топ-10 производителей промышленных роботов в 2020 году
- Промышленные роботы - полное руководство
- Робототехника в автомобилестроении
- Система складирования роботов:что это такое и как используется
- Робот-захват:что это такое и как используется для роботов
- Какие преимущества роботизированного оружия для людей?
- Индустриальная автоматизация