Инвалидная коляска с управлением жестами рук для людей с ограниченными возможностями
Компоненты и расходные материалы
 | | × | 2 | |
| | | × | 2 | |
 | | Драйверы двигателя SparkFun Dual H-Bridge L298 | | × | 1 | |
 | | × | 1 | |
 | | Двигатель постоянного тока, 12 В | | × | 2 | |
Приложения и онлайн-сервисы
Об этом проекте
https://drive.google.com/open?id=1RNI2ehaknWPN0lPpKm8wv95DUVcTr8H6

• Процент людей с ограниченными возможностями увеличился как в сельской, так и в городской части Индии. Инвалидность может быть вызвана рождением или какой-либо медицинской или случайной причиной.
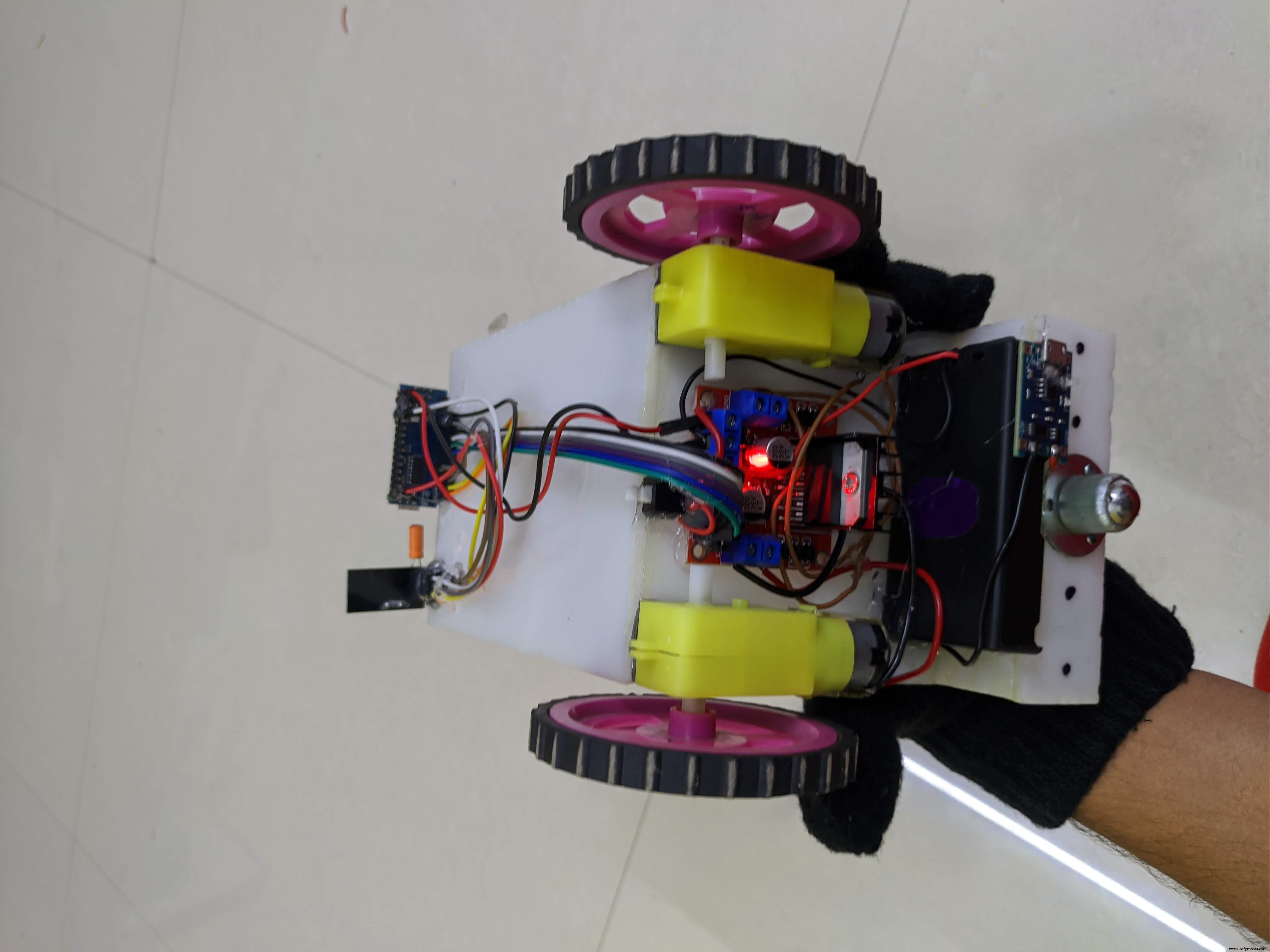
• Цель этого проекта - создать кресло-коляску с управлением жестами руки и использовать акселерометр в качестве датчика, чтобы помочь людям с ограниченными физическими возможностями перемещаться из одного места в другое, просто давая указание рукой
• Сегодня в Индии многие люди страдают инвалидностью, есть люди, у которых парализована нижняя половина тела. Эта инвалидная коляска добавит комфорта и сделает жизнь людей немного проще
Код
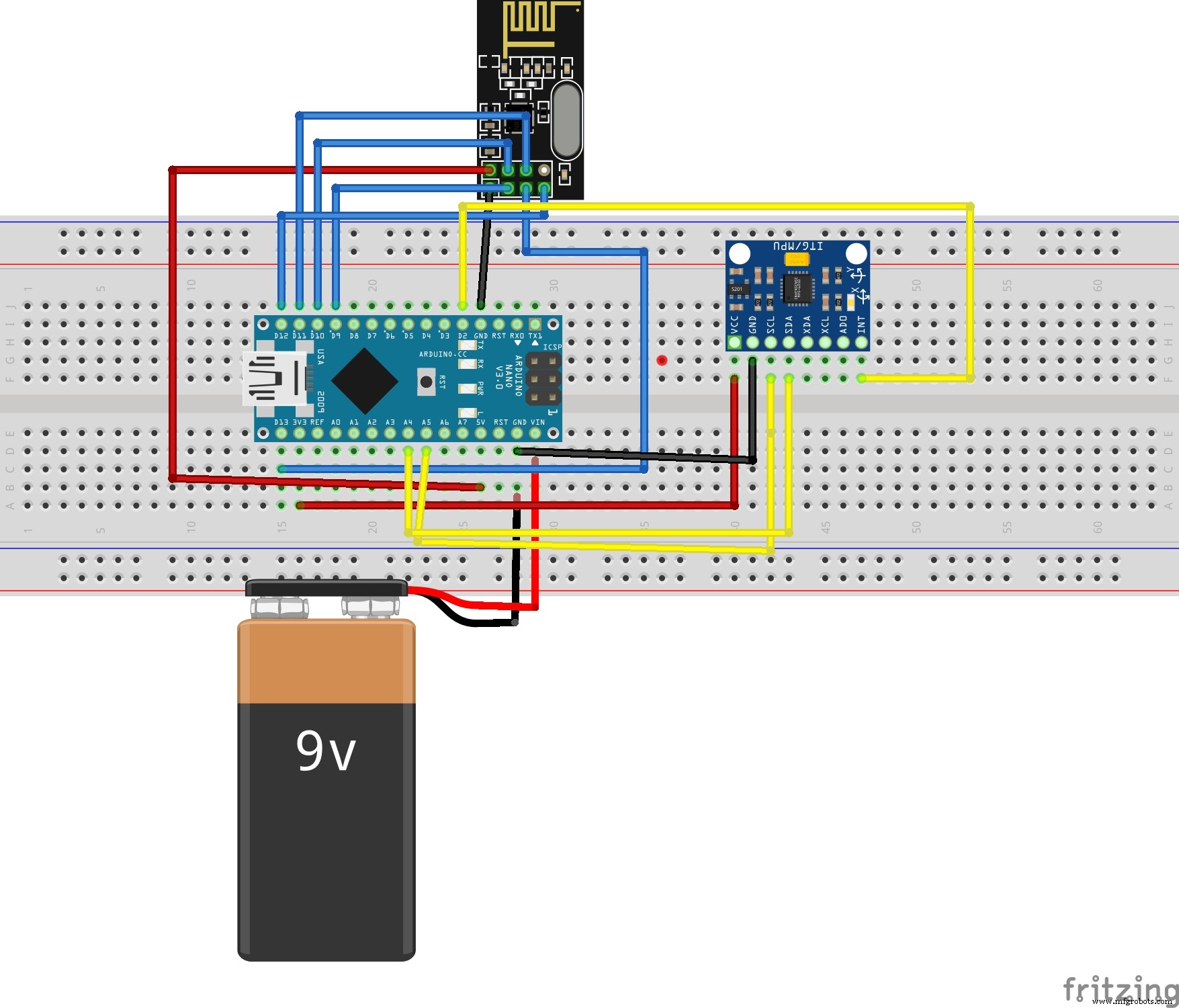
- Код передатчика
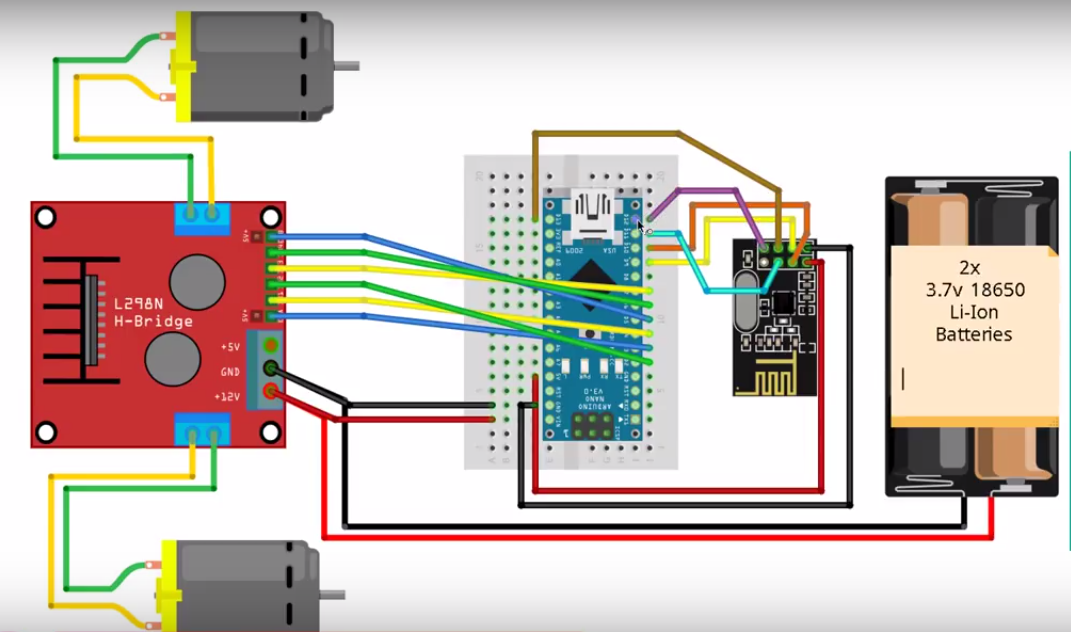
- Код получателя
Код передатчика Arduino
#include // Библиотека SPI для связи с nRF24L01 + # include "RF24.h" // Основная библиотека nRF24L01 + # include "Wire.h" // Для связи # include "I2Cdev. h "// Для связи с MPU6050 # include" MPU6050.h "// Основная библиотека MPU6050MPU6050 mpu; int16_t ax, ay, az; int16_t gx, gy, gz; int data [2]; RF24 radio (9, 10); const uint64_t pipe =0xE8E8F0F0E1LL; установка void (void) {Serial.begin (9600); Wire.begin (); mpu.initialize (); // Инициализируем объект MPU radio.begin (); // Запускаем nRF24 для связи radio.openWritingPipe (pipe); // Устанавливает адрес получателя, которому программа будет отправлять данные.} Void loop (void) {mpu.getMotion6 (&ax, &ay, &az, &gx, &gy, &gz); данные [0] =map (ax, -17000, 17000, 300, 400); // Отправляем данные по оси X [1] =map (ay, -17000, 17000, 100, 200); // Отправляем данные оси Y radio.write (data, sizeof (data));}
Код приемника Arduino
#include #include #include #include #include // Библиотека SPI для связи с nRF24L01 + # include " RF24.h "// Основная библиотека nRF24L01 + const int enbA =3; const int enbB =5; const int IN1 =2; // Правый мотор (-) const int IN2 =4; // Правый мотор (+) const int IN3 =7; // Левый мотор (+) const int IN4 =6; // Правый мотор (-) int RightSpd =130; int LeftSpd =130; int data [2]; RF24 radio (9,10); const uint64_t pipe =0xE8E8F0F0E1LL; void setup () {// Определить выводы мотора как ВЫХОД pinMode (enbA, ВЫХОД); pinMode (enbB, ВЫХОД); pinMode (IN1, ВЫХОД); pinMode (IN2, ВЫХОД); pinMode (IN3, ВЫХОД); pinMode (IN4, ВЫХОД); Serial.begin (9600); radio.begin (); radio.openReadingPipe (1, труба); radio.startListening (); } void loop () {if (radio.available ()) {radio.read (данные, sizeof (данные)); if (data [0]> 380) {// вперед analogWrite (enbA, RightSpd); analogWrite (enbB, LeftSpd); digitalWrite (IN1, HIGH); digitalWrite (IN2, LOW); digitalWrite (IN3, HIGH); digitalWrite (IN4, LOW); } if (data [0] <310) {// назад analogWrite (enbA, RightSpd); analogWrite (enbB, LeftSpd); digitalWrite (IN1, LOW); digitalWrite (IN2, HIGH); digitalWrite (IN3, LOW); digitalWrite (IN4, HIGH); } if (data [1]> 180) {// left analogWrite (enbA, RightSpd); analogWrite (enbB, LeftSpd); digitalWrite (IN1, HIGH); digitalWrite (IN2, LOW); digitalWrite (IN3, LOW); digitalWrite (IN4, HIGH); } if (data [1] <110) {// right analogWrite (enbA, RightSpd); analogWrite (enbB, LeftSpd); digitalWrite (IN1, LOW); digitalWrite (IN2, HIGH); digitalWrite (IN3, HIGH); digitalWrite (IN4, LOW); } if (data [0]> 330 &&data [0] <360 &&data [1]> 130 &&data [1] <160) {// останавливаем машину analogWrite (enbA, 0); analogWrite (enbB, 0); }}}