


Автомобиль с голосовым управлением
Компоненты и расходные материалы
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 |
Об этом проекте
Компоненты:
- Arduino Uno
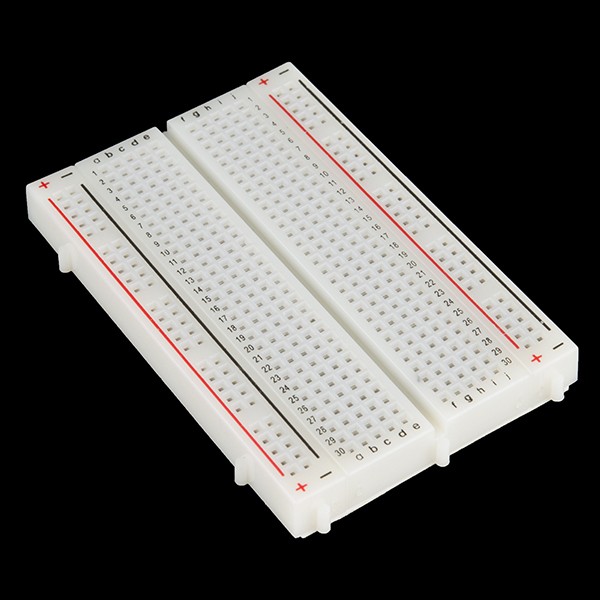
- Макет
- Двигатели x2
- Колеса x2
- Шасси (подходящего размера)
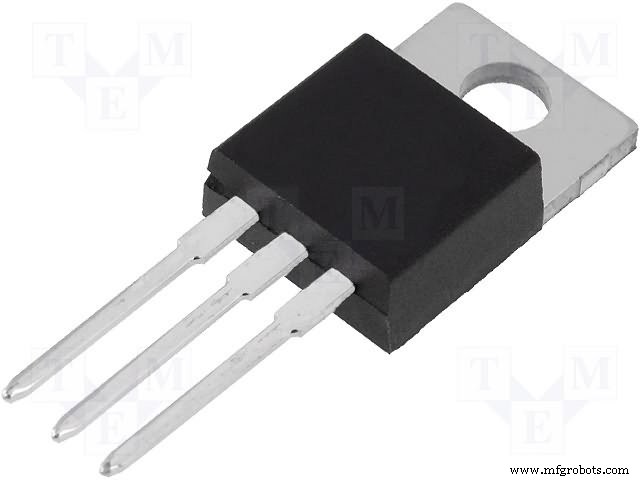
- Регулятор напряжения LM7805
- L293D
- Аккумулятор 12 В (источник питания)
- Перемычки
- Модуль Bluetooth HC-05
Вы можете найти приложение здесь:https://play.google.com/store/apps/details?id=appinventor.ai_cempehlivan92.Arduino_Sesli_Kontrol
Идея:
Подключаем модуль Bluetooth к мобильному приложению. После этого команды, которые мы даем через мобильный телефон, отправляются в Arduino через модуль. Мы принимаем посимвольно из последовательного буфера, отправляемого приложением, и объединяем их в строку.
Затем мы сравниваем его с командой. Если он совпадает, команда выполняется. Например, когда мы получаем строку «Вправо», бот поворачивает вправо.
Подключения:
Найдите все подключения здесь:https://yainnoware.blogspot.com/p/voice-controlled-car.html
Код:
int motor_input1 =11; int motor_input2 =10; int motor_input3 =5; int motor_input4 =6; String voice; void setup () {Serial.begin (9600); pinMode (мотор_вход1, ВЫХОД); // ПРАВЫЙ ДВИГАТЕЛЬ pinMode (motor_input2, OUTPUT); // ПРАВЫЙ ДВИГАТЕЛЬ pinMode (motor_input3, OUTPUT); // ЛЕВЫЙ ДВИГАТЕЛЬ pinMode (motor_input4, OUTPUT); // ЛЕВЫЙ ДВИГАТЕЛЬ} void loop () {while (Serial.available ()> 0) {delay (10); char c =Serial.read (); если (c =='#') {перерыв; } Voice + =c; } Если (голос =="вперед") {digitalWrite (motor_input1, LOW); digitalWrite (мотор_вход2, ВЫСОКИЙ); digitalWrite (motor_input3, LOW); digitalWrite (motor_input4, HIGH); задержка (5000); } Иначе, если (voice =="назад") {digitalWrite (motor_input1, HIGH); digitalWrite (motor_input2, LOW); digitalWrite (motor_input3, HIGH); digitalWrite (motor_input4, LOW); delay (5000);} иначе, если (voice =="left") {digitalWrite (motor_input1, LOW); digitalWrite (мотор_вход2, ВЫСОКИЙ); digitalWrite (motor_input3, HIGH); digitalWrite (motor_input4, LOW); задержка (800); } Else if (voice =="right") {digitalWrite (motor_input1, HIGH); digitalWrite (motor_input2, LOW); digitalWrite (motor_input3, LOW); digitalWrite (motor_input4, HIGH); задержка (800); } Если (voice.length ()> 0) {Serial.println (голос); voice =""; digitalWrite (motor_input1, LOW); digitalWrite (motor_input2, LOW); digitalWrite (motor_input3, LOW); digitalWrite (motor_input4, LOW); }} Производственный процесс
- MajorTom:ARDrone 2.0 с голосовым управлением Alexa
- Цифровые игральные кости Arduino
- Рулетка DIY 37 LED
- Радиоуправляемая машина с джойстиком
- Мини-аркада ATtiny85:Змейка
- Переносимый детектор дальности
- MobBob:самостоятельный робот Arduino, управляемый смартфоном Android
- Гидравлический кран, управляемый приложением
- Умный автомобиль-робот с отслеживанием лиц
- Робот-пианино, управляемый Arduino:PiBot