


Робот Raspberry Pi:как собрать робота Raspberry Pi
Малиновый Пи
Вы находите сложным и сложным построить робота Raspberry Pi? Тогда вы в правильном месте.
Действительно, использование платы Pi для вашего робота даст вам полноценный компьютер по доступной цене. Следовательно, если вы объедините это с ее небольшим форм-фактором и широкой поддержкой сообщества, это будет отличная доска даже для новичков.
Однако погружение в мир робототехники означает погружение в более продвинутые схемы. Но не волнуйтесь, мы сделаем это максимально просто. https://www.wellpcb.com/
Итак, в этой статье мы расскажем, как построить робота Raspberry Pi, а также о различных проектах роботов Pi, которые вы можете сделать.
Как собрать робота Raspberry Pi
Здесь мы покажем вам, как построить удобного для начинающих робота Pi, который может избегать препятствий и свободно перемещаться. Вот детали, которые вам понадобятся для этого проекта:
- Raspberry Pi (модели B, B+ или 2)
- Двигатели постоянного тока с редуктором (1)
- Колесо (1)
- SD-карта (1)
- Мышь (1)
- Кнопка (1)
- Мышь (1)
- Резистор 200 Ом (1)
- Макет (1)
- Двусторонний скотч (1)
- Клавиатура
- Драйвер L293D (1)
- Джемперы "мужчина-мужчина" или "женщина-женщина" (1)
- Шасси и колеса робота (1)
- Модули ИК-датчиков (1)
Создание проекта
Во-первых, нам нужно подключить ИК-датчик к Raspberry Pi. Итак, для этого наденьте Raspberry Pi, подключив его к клавиатуре, мыши и монитору. Затем нажмите на датчик и убедитесь, что он работает правильно.
После этого подключите контакт Pi 5V и контакт GND к датчику для источника питания. Затем подключите контакт B датчика к контактам 16 и 3 GPIO. Наконец, проверьте конфигурацию контактов GPIO.BOARD.
Затем введите следующий код и сохраните его как файл Python, желательно irtest.py.
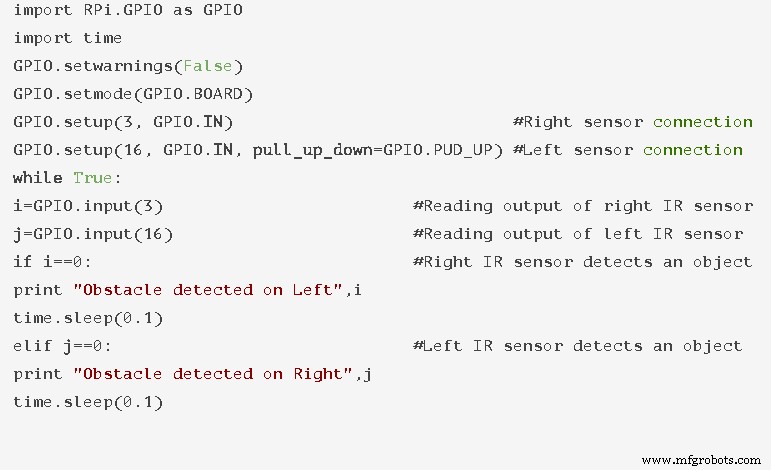
Код для файла Python
Как только вы сохраните и запустите файл python, вы заметите следующие выходные данные, когда блокируете датчик:
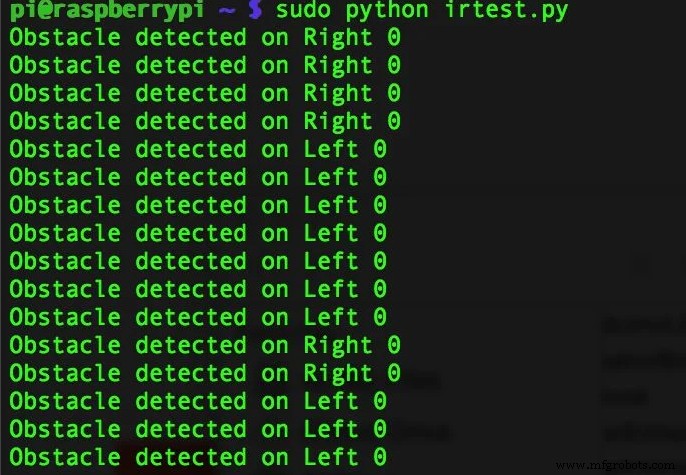
Вывод на печать для файла Python
Итак, попробуйте проверить соединения или заменить компоненты, если это не работает.
Подключите двигатели к L293D
Теперь мы будем использовать модуль L293D для подключения двигателей. Но сначала подайте питание на L293D через контакты + и –. Затем также подключите эти контакты источника питания к плате 9-вольтовой батареи.
Полное подключение
Кроме того, соедините контакт – L293D с контактом GND Pi. Посмотрите на схему ниже, чтобы получить четкое представление о соединениях.
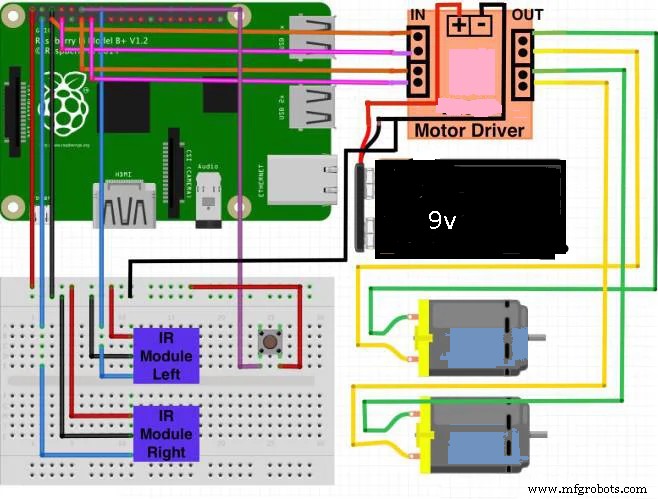
Кроме того, используйте четыре выходных контакта GPIO для создания входов для платы. Кроме того, вы можете использовать эти выходные контакты для управления направлением вращения двух двигателей.
Кроме того, вы можете подключить две клеммы двигателя к четырем выходным клеммам платы. Наконец, прикрепите кнопку для активации или деактивации вашего робота для вашего последнего соединения.
Окончательная конструкция
Теперь вы можете добавить колеса к своим двигателям и собрать соединения на шасси вашего робота. Убедитесь, что вы закрепили детали двусторонней лентой, чтобы они не упали.
Не забудьте проверить свои двигатели с помощью приведенного ниже кода. Кроме того, убедитесь, что вы сохранили код в виде файла Python:moto.py. Затем используйте команду sudo motor.py для запуска кода. Ваши двигатели должны начать вращаться, если он работает.
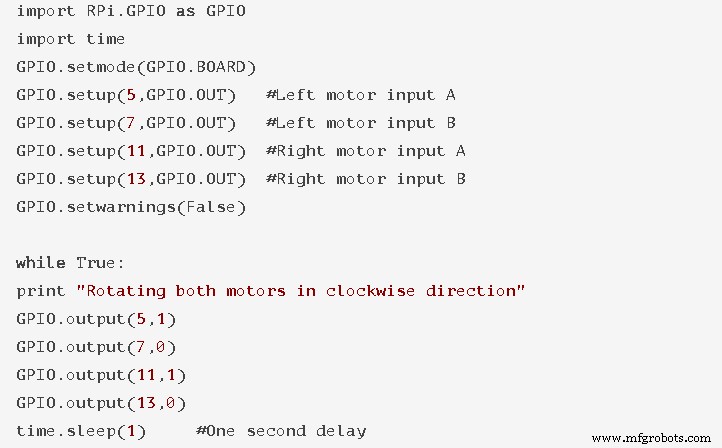
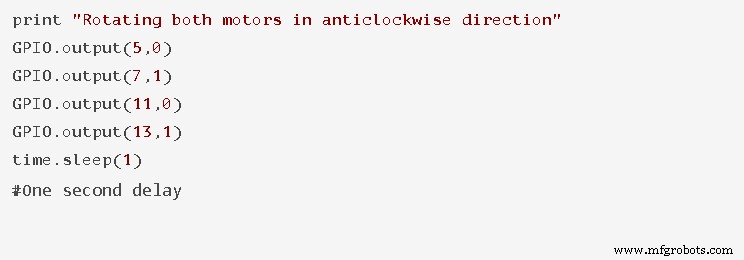
Код для тестирования моторов
Как это работает
Когда вы нажимаете кнопку, робот активируется и начинает двигаться. Двигаясь вперед, робот будет искать любые объекты, блокирующие его путь, с помощью ИК-датчика. Как только он обнаружит препятствие, Pi позволит роботу маневрировать вокруг препятствия. Опять же, вы можете деактивировать робота, нажав кнопку.
Проекты роботов Raspberry Pi
Итак, если вы выполнили простой проект, описанный выше, и вам нужны дополнительные задачи, вот несколько отличных идей для проектов.
1. Четвероногий робот CHOP

Разрубить четвероногого робота
Действительно, четвероногий робот-отбивная — это проект «сделай сам», похожий на рекламный ролик Boston Dynamics. Кроме того, проект CHOP имеет открытый исходный код. Следовательно, вы можете настроить и настроить его с помощью нескольких напечатанных на 3D-принтере деталей и других материалов.
Без сомнения, Raspberry Pi 4B и Arduino Mega являются важными компонентами этого робота. Кроме того, Arduino фильтрует данные с датчиков и подключается к сервоконтроллерам. С другой стороны, Pi собирает все данные и запускает различные скрипты Python для управления движением робота.
Кроме того, Pi использует обратную кинематическую модель для управления движением сервоприводов. Наконец, вы можете использовать контроллер Bluetooth для управления направлением движения робота.
2. Робот для пинг-понга
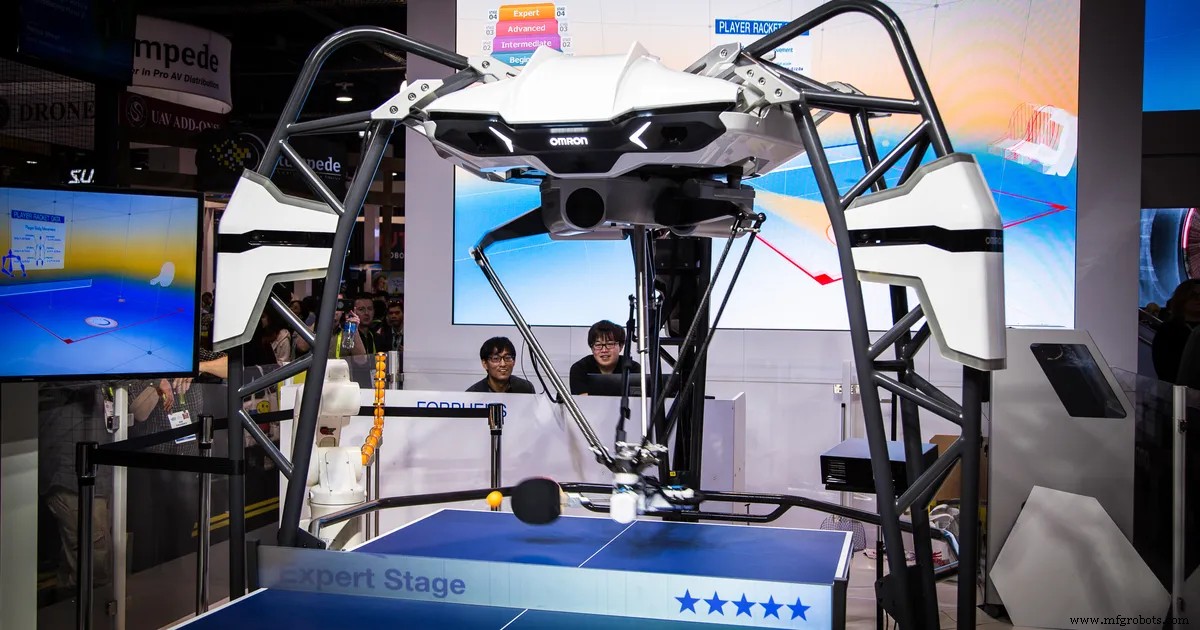
Робот для пинг-понга
Робот для пинг-понга может играть в настольный теннис с людьми. И на разных уровнях, от продвинутого до простого.
Вы используете пинг-понг-бота для развлекательных игр или серьезных тренировок. Однако вы могли приобрести коммерческую версию примерно за две тысячи долларов. Или с легкостью сделайте самодельную версию из уже имеющихся деталей, деталей, напечатанных на 3D-принтере или вырезанных лазером.
Кроме того, вы можете подключиться к боту через Wi-Fi и получить полный контроль.
3. Гуманоидный робот Raspberry Pi

Робот-гуманоид
Вы можете построить своего робота-гуманоида, используя Raspberry Pi. У некоторых роботов-гуманоидов есть функции обхода препятствий, ультразвукового определения расстояния или беспроводного управления.
Независимо от функции, для этого проекта вам понадобится комплект Robotics Bioloid, гироскоп и датчик расстояния.
Кроме того, мы рекомендуем использовать Raspberry Pi Zero меньшего размера и одноэлементную батарею емкостью 2500 мАч для питания.
Кроме того, вам понадобится микросхема аналого-цифрового преобразователя, чтобы вы могли считывать данные с датчика.
4. Пи-румба

Румба
Если вы разбираетесь в робототехнике, то наверняка слышали о роботе-пылесосе Roomba.
Однако вы можете создать свой с помощью Raspberry Pi и более интеллектуальных движений.
Вам понадобится последовательный интерфейс Roomba 530, чтобы вы могли подключиться к Raspberry Pi.
Кроме того, вы будете использовать пакет Javascript для кодирования. Коробка также использует RxTX для связи с роботом.
Кроме того, вы можете управлять роботом Roomba с помощью джойстика и даже настраивать выходной уровень.
5. Масляный робот
Интеллектуальный масляный робот может записывать и транслировать видео с отличным качеством. Кроме того, он может записывать и выводить звук.
Самое приятное то, что для записи этих звуков и видео вам понадобится только модуль камеры Raspberry Pi и USB-устройство.
Однако компоненты робота включают:
- Raspberry Pi Zero W
- Модуль камеры RPi
- Двигатели постоянного тока
- Аудиоплата USB
- Драйвер двигателя L9110
- Под руководством
- Аккумулятор
- Сервоприводы 9g
- Ползунок
- Динамик
Кроме того, вы можете использовать этого робота через приложение Blynk, которое поддерживает потоковое видео.
6. Роботизированный кот Петой
Вы можете создать симпатичного робота-кота с помощью проекта Nybble с открытым исходным кодом для механических кошек. Кроме того, вы можете использовать деревянные детали, вырезанные лазером, вместо деталей, напечатанных на 3D-принтере.
Другие компоненты для этого проекта включают Raspberry Pi 3B+, комплект Nybble и Sparkfun Arduino Pro Mini.
Кроме того, вы можете управлять движением этого робота с помощью микроконтроллера, совместимого с Arduino. Кошка-робот также может хранить мышечную память, которая позволяет ему помнить, как двигаться.
Кроме того, Raspberry Pi в этом проекте позволяет настраивать код Nybble и давать простые команды.
7. Спот Микро
Spot micro — это уменьшенная версия популярного четверного робота Spot. Кроме того, вы можете перейти на рысь и шагать с трехосевыми «режимами управления командами угла».
Робот работает на Raspberry Pi 3B с Ubuntu. Кроме того, он использует среду C++ и Python.
Кроме того, вам потребуются следующие компоненты вашего желания попробовать этот проект:
- Машина Pi 3 B
- ЖК-панель 15 × 2
- Сервоплата PCA9685
- Аккумулятор 4000 мА·ч
- регулятор напряжения 5 В
- Детали, напечатанные на 3D-принтере
- Лидер (необязательно для сопоставления помещений)
8. Миниатюрный боевой робот
Хотите построить мощного боевого робота? Тогда вы можете попробовать этот проект. Используя Raspberry Pi Zero, вы можете преобразовывать входные данные от контроллера Bluetooth в команды для контроллеров двигателей вашего робота.
Вместо использования радиоуправляемого передатчика в проекте используется более простая конфигурация контактов GPIO.
Было бы неплохо, если бы у вас была плата L298N для передвижения, ESC Tarot TL300G для вращения бесколлекторных двигателей и аккумулятор на 500 мАч. И у вас есть боевой мини-робот на шасси, напечатанном на 3D-принтере.
9. Робот-опустошитель Raspberry Pi

Робот-разрушитель
Как следует из названия, вы можете построить роботизированный резервуар с Raspberry Pi Zero W. Вся сборка включает в себя специальный кронштейн, напечатанный на 3D-принтере, некоторый код Python и схему контроллера двигателя. Вы также можете добавить установленную камеру.
Кроме того, вы можете найти все необходимое для этого проекта на мобильной платформе Devastator Tank.
Заключительные слова
Raspberry Pi — это универсальный мини-компьютер, который подходит для различных приложений. В большинстве проектов роботов Raspberry Pi, которые мы перечислили в этой статье, используется только удобный для начинающих Python.
Также, если вы не можете найти все компоненты, необходимые для проекта, вы можете попробовать наборы роботов. Покупка автоматического оборудования даст вам готовые детали для вашего проекта робота.
Тем не менее, вам потребуется базовый или средний набор навыков, чтобы попробовать любой из этих проектов.
У вас есть вопросы? Не стесняйтесь обращаться к нам, и мы будем рады помочь.
Промышленные технологии
- Как 3D-принтеры создают металлические объекты
- Как построить текущую схему зеркала
- Как создать платформу для роботов Arduino + Raspberry Pi
- Робот, использующий Raspberry Pi и Bridge Shield
- Робот-бокс для компакт-дисков Raspberry Pi
- Робот, управляемый Wi-Fi и использующий Raspberry Pi
- Как создать программу технического обслуживания электрооборудования
- Как разработать план развития продукта для Интернета вещей
- Как построить Саурона, повелителя роботов
- Как построить программу обслуживания электрооборудования