


Калькулятор правила Крамера - система 2 и 3 уравнений
Правило Крамера и калькулятор для анализа линейных цепей | Шаг за шагом с решенными примерами
Сегодня мы поделимся еще одним простым, но мощным методом анализа цепей, который известен как «правило Крамера». «.- Анализ цепей SUPERMESH | Шаг за шагом с решенным примером
Калькулятор правила Крамера для 2×2 (система двух уравнений)
Пример 2: Используйте Mesh Analysis, чтобы определить три тока сетки в схеме ниже. Используйте правило Крамера для упрощения.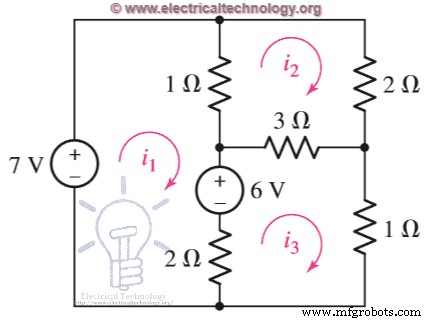 Прежде всего, примените KVL к каждому мешу один за другим и напишите его уравнения. -7+1(i 1 –я 2 ) +6+2(i 1 –я 3 ) =0 1(i 2 –я 1 ) + 2i 2 + 3(i 2 –я 3 ) =0 2(i 3 –я 1 ) – 6+3(i 3 –я 2 ) + 1я 3 =0Упрощение, 3i 1 –я 2 – 2я 3 =1 … Уравнение….. (1) – i 1 + 6я 2 – 3я 3 =0 … Уравнение….. (2) -2i 1 – 3я 2 + 6я 3 =6 … Уравнение….. (3) Теперь запишите приведенные выше уравнения в матричной форме. 3я 1 – я 2 – 2я 3 =1 –i 1 + 6я 2 – 3я 3 =0-2i 1 – 3я 2 + 6я 3 =6
Прежде всего, примените KVL к каждому мешу один за другим и напишите его уравнения. -7+1(i 1 –я 2 ) +6+2(i 1 –я 3 ) =0 1(i 2 –я 1 ) + 2i 2 + 3(i 2 –я 3 ) =0 2(i 3 –я 1 ) – 6+3(i 3 –я 2 ) + 1я 3 =0Упрощение, 3i 1 –я 2 – 2я 3 =1 … Уравнение….. (1) – i 1 + 6я 2 – 3я 3 =0 … Уравнение….. (2) -2i 1 – 3я 2 + 6я 3 =6 … Уравнение….. (3) Теперь запишите приведенные выше уравнения в матричной форме. 3я 1 – я 2 – 2я 3 =1 –i 1 + 6я 2 – 3я 3 =0-2i 1 – 3я 2 + 6я 3 =6 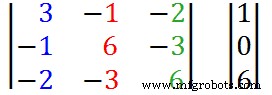 Теперь найдем определитель коэффициента ∆. Как мы это сделаем? Просто посмотрите на рисунок ниже для лучшего объяснения. Нажмите на изображение, чтобы увеличить
Теперь найдем определитель коэффициента ∆. Как мы это сделаем? Просто посмотрите на рисунок ниже для лучшего объяснения. Нажмите на изображение, чтобы увеличить  Полный шаг показан ниже.
Полный шаг показан ниже.  ∆ =+3 (6 x 6) – (- 3 x –3) – (-1 (- 1 x 6)-(-2 x –3) + (-2 (-1 x –3) – (-2 x 6)∆ =81 -12 -30 =39 Теперь найдите ∆1 так же, как описано выше. Но просто замените первый столбец матрицы на «Столбец ответов». Подробности см. на рис., показанном ниже.
∆ =+3 (6 x 6) – (- 3 x –3) – (-1 (- 1 x 6)-(-2 x –3) + (-2 (-1 x –3) – (-2 x 6)∆ =81 -12 -30 =39 Теперь найдите ∆1 так же, как описано выше. Но просто замените первый столбец матрицы на «Столбец ответов». Подробности см. на рис., показанном ниже. 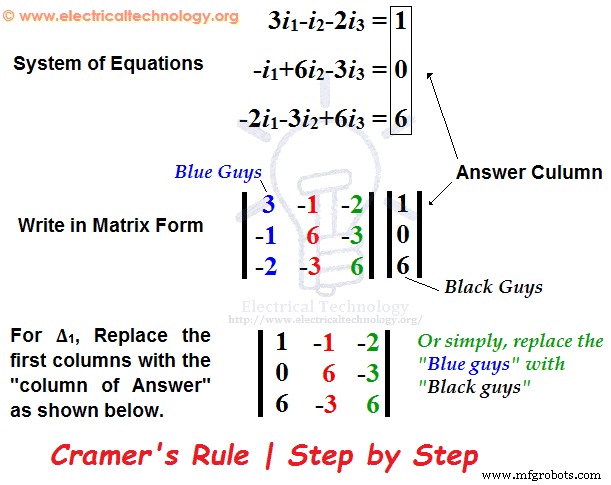 Итак, вот полный шаг, чтобы найти ∆1 . Здесь мы заменили «Синих парней» в первой колонке на «Черных парней» :).
Итак, вот полный шаг, чтобы найти ∆1 . Здесь мы заменили «Синих парней» в первой колонке на «Черных парней» :). 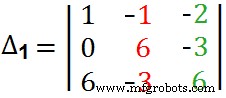 =+1(36-9) – (–1[0+18]) –2(0- 36)=27 + 18 + 72∆1 =117 Снова найдите ∆2 тем же методом, что описан ранее. Просто замените второй столбец матрицы на «Столбец ответов», т.е. замените «Красных парней» в центральном столбце на «Черных парней», как показано ниже.
=+1(36-9) – (–1[0+18]) –2(0- 36)=27 + 18 + 72∆1 =117 Снова найдите ∆2 тем же методом, что описан ранее. Просто замените второй столбец матрицы на «Столбец ответов», т.е. замените «Красных парней» в центральном столбце на «Черных парней», как показано ниже. 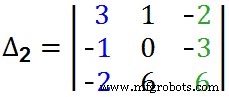 =+3 (0 +18) -1[(-6)-(+6)] –2 (-6-0)=54+12+12 =78∆2 =78 Наконец, найдите последнее ∆3 . Просто замените третий столбец на «Столбец ответов», то есть замените «Зеленых парней в третьем столбце» на «Черных парней», как показано ниже.
=+3 (0 +18) -1[(-6)-(+6)] –2 (-6-0)=54+12+12 =78∆2 =78 Наконец, найдите последнее ∆3 . Просто замените третий столбец на «Столбец ответов», то есть замените «Зеленых парней в третьем столбце» на «Черных парней», как показано ниже.  =+3 (6 x 6) – (-3 x 0) – [-1 (-1 x 6) – (-2 х 0)] + [1(-1) х (-3) – (-2) х (6)]=108 + 6 + 15∆3 =117 Теперь решите и найдите неизвестные значения тока, т.е. i 1 , я 2 и я 3 .Как гласит правило Крамера, переменные, т. е. i 1 =∆1/∆1 , я 2 =∆/∆2 и я 3 =∆/∆3 . Поэтому i 1 =∆1/∆1 =117/39i 1 =3А И я 2 ,я 2 ==∆/∆2 =78/39i 2 =2А И, наконец, i 3 ;я 3 =∆/∆3 =117/39i 3 =3А. Я надеюсь, что вы хорошо поняли правило Крамера и вам понравилось пошаговое руководство. Пожалуйста, не забудьте поделиться с друзьями. Кроме того, введите свой адрес электронной почты в поле ниже, чтобы подписаться. Итак, мы вышлем вам больше руководств, подобных приведенному выше. Спасибо.
=+3 (6 x 6) – (-3 x 0) – [-1 (-1 x 6) – (-2 х 0)] + [1(-1) х (-3) – (-2) х (6)]=108 + 6 + 15∆3 =117 Теперь решите и найдите неизвестные значения тока, т.е. i 1 , я 2 и я 3 .Как гласит правило Крамера, переменные, т. е. i 1 =∆1/∆1 , я 2 =∆/∆2 и я 3 =∆/∆3 . Поэтому i 1 =∆1/∆1 =117/39i 1 =3А И я 2 ,я 2 ==∆/∆2 =78/39i 2 =2А И, наконец, i 3 ;я 3 =∆/∆3 =117/39i 3 =3А. Я надеюсь, что вы хорошо поняли правило Крамера и вам понравилось пошаговое руководство. Пожалуйста, не забудьте поделиться с друзьями. Кроме того, введите свой адрес электронной почты в поле ниже, чтобы подписаться. Итак, мы вышлем вам больше руководств, подобных приведенному выше. Спасибо. Связанные сообщения и инструменты анализа цепей:
- Теорема Нортона. Простая пошаговая процедура с примером (изображения)
- Теорема Тевенина. Простая пошаговая процедура с примером (изображения)
- Онлайн-калькуляторы для электротехники и электроники
- 10+ онлайн-инструментов проектирования и моделирования для инженеров-электриков и электронщиков
- Проектирование печатных плат:как спроектировать печатную плату (пошаговые и графические изображения)
- 15 обязательных приложений Android для инженеров по электротехнике и электронике и студентов
- Анализ схемы SUPERNODE | Шаг за шагом с решенным примером
- Анализ цепей SUPERMESH | Шаг за шагом с решенным примером
- Калькуляторы для электротехники и электроники
Анализ цепи SUPERMESH | Шаг за шагом с решенным примером
Что такое падение напряжения? Расширенный калькулятор падения напряжения с решенными примерами
Промышленные технологии
- Уравнения и законы цепи постоянного тока
- Решение одновременных уравнений:метод подстановки и метод сложения
- Основы встроенной системы и приложений
- Расширенная система охлаждения для компьютеров и аккумуляторов
- Планирование и проектирование системы распределения
- Соображения и ограничения при проектировании системы передачи энергии
- Встроенные системы и системная интеграция
- В чем разница между гипертуманом и спринклерной системой?
- Как спланировать и инвестировать в новую систему CAD/CAM
- Понимание системы трения и рекуперативного торможения