


Мегапиксельная камера со счетчиком фотонов
Представьте себе камеру, предназначенную для захвата изображений с разрешением в один фотон со скоростью 24 000 кадров в секунду. Благодаря электронному затвору, который может оставаться открытым всего 3,8 нс и синхронизироваться с быстрыми лазерными импульсами длительностью всего несколько пикосекунд, можно буквально увидеть свет, распространяющийся в пространстве. Благодаря этой возможности открываются новые приложения, такие как квантовое зрение, визуализация призраков, визуализация с дробовым шумом, квантовый LiDAR и квантовая дистилляция, и это лишь некоторые из них.
Общим для этих приложений является потребность в однофотонном обнаружении и высоком временном разрешении с низким уровнем шума и высокой чувствительностью. Эта новая камера способна на все это, но, кроме того, она делает это на миллионе пикселей одновременно, что позволяет значительно ускорить захват и, возможно, реконструкцию. В основе этих пикселей находится однофотонный лавинный диод (SPAD), который выполняет обнаружение фотонов, генерируя цифровой импульс. Этот импульс можно подсчитывать или ставить временную метку, что придает камере характер подсчета фотонов и временного разрешения.
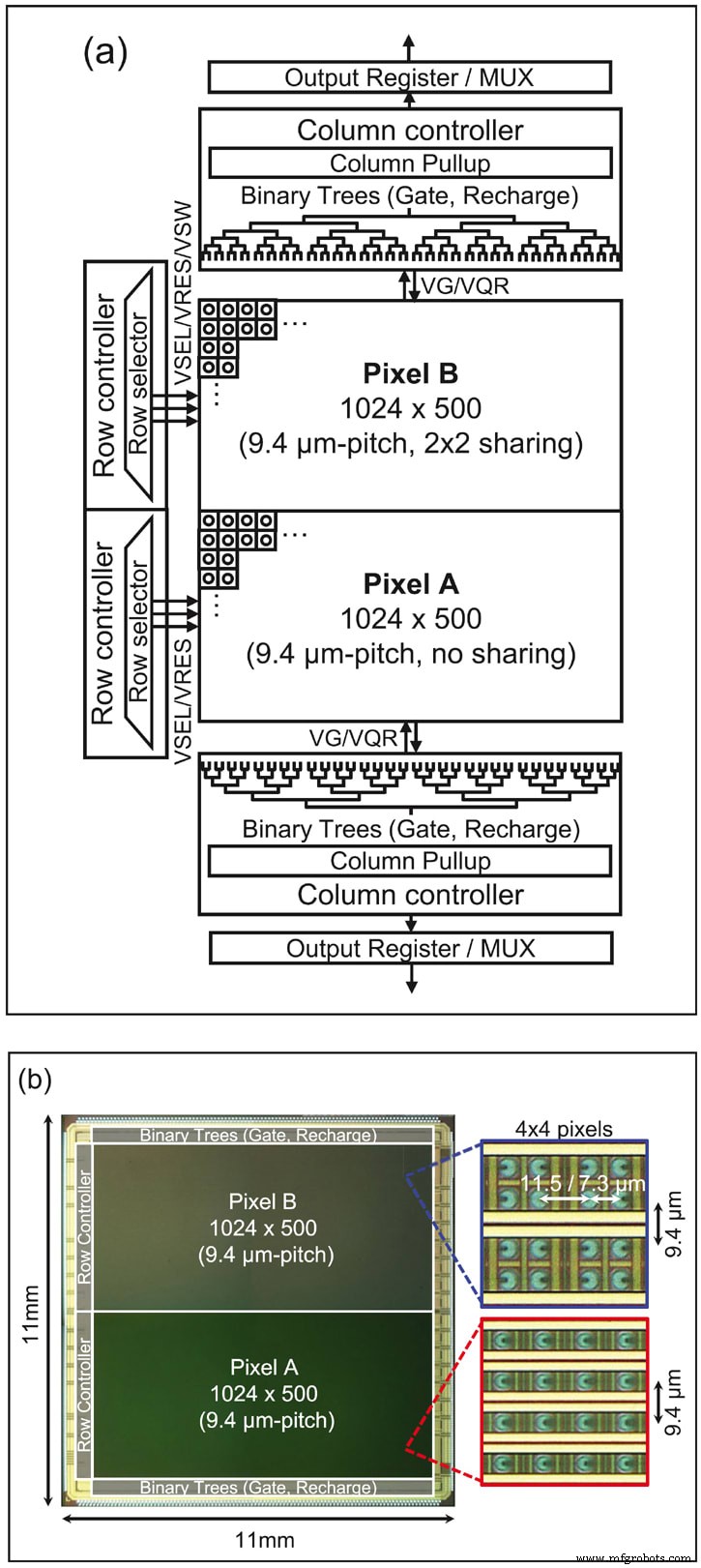
В статье, опубликованной в рецензируемом журнале Optica, мы представили первую 1-мегапиксельную камеру на основе пикселей SPAD. Пиксели имеют шаг 9,4 мкм с архитектурой 7T (7 транзисторов на пиксель) или 5,75T. Микрофотография чипа камеры показана на рис. 1(б). Блок-схема камеры показана на рис. 1(а); он включает в себя двойное бинарное дерево для управления затвором с точностью около 100 пс и положением, регулируемым с шагом 36 пс. Это позволяет реконструировать трехмерные изображения путем измерения времени прохождения светового импульса, когда он выходит из лазера и отражается от объекта. Он также позволяет улавливать свет в полете, тем самым выявляя интересные релятивистские эффекты в лаборатории.
Чип был протестирован в качестве датчика изображения интенсивности со стандартной диаграммой (рис. 2(а)) с разрядностью до 14 бит на уровне пикселей. На рисунках 3(a) и (b) показаны 2D- и 3D-изображения с цветовой кодировкой, полученные путем освещения сцены лазером с длиной волны 637 нм с импульсной частотой 40 МГц и захваченные датчиком изображения с половинным разрешением. Окно затвора с его длиной 3,8 нс сдвигается с 0,6 нс до 13,2 нс с шагом 36 пс, чтобы получить полные профили интенсивности фотонов в зависимости от положения затвора.

Расстояние LSB в этом измерении соответствует 5,4 мм. Информация о глубине восстанавливается путем обнаружения положения переднего края сглаженного профиля интенсивности для каждого пикселя, соответствующего времени прихода отраженного лазерного импульса. Рассогласование синхронизации стробов в массиве компенсируется путем вычитания независимо измеренного распределения рассогласования синхронизации из измеренного распределения времени прибытия. На рисунке 3(b) красный цвет обозначает большую близость к камере SPAD, тогда как синий цвет соответствует большему расстоянию. Максимальный диапазон глубины для этого измерения был установлен на 2 м, но его можно расширить до десятков метров, снизив частоту повторения лазера и увеличив шаг стробирования.
Малый шаг сканирования строба и длительная экспозиция используются для достижения высокой точности глубины, и полученное время сбора данных для этого измерения составило несколько десятков секунд. Это значительно больше, чем у других методов определения дальности, таких как непрямое время пролета, но его можно легко уменьшить, увеличив шаг сканирования затвора, уменьшив диапазон сканирования и увеличив мощность лазера для уменьшения времени экспозиции. Кроме того, ожидается дальнейшее улучшение за счет внедрения встроенной микролинзы для повышения чувствительности.
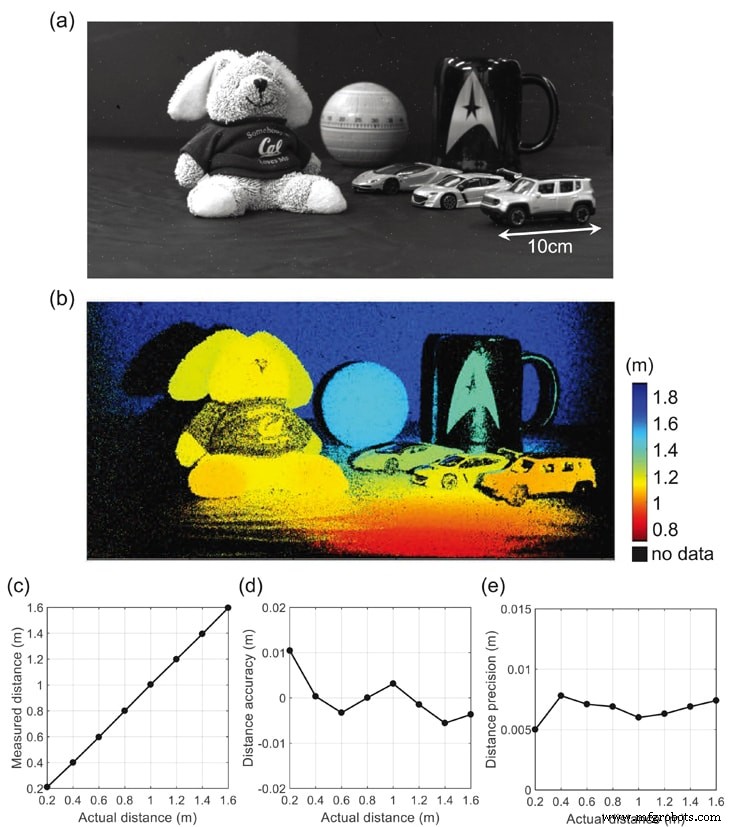
На рис. 3(с) показано измеренное расстояние в зависимости от фактического расстояния до объекта. На рисунке 3(c), (d) и (e) плоский объект, покрытый белой бумагой (коэффициент отражения около 60%), используется для оценки измеренного расстояния, точности и прецизионности. На рисунке 3(c) измеренное расстояние извлекается путем получения среднего значения расстояния одного пикселя по 20×20 пикселям в центре массива. Очень хорошее совпадение с реальным расстоянием наблюдается в измеренном диапазоне от 0,2 до 1,6 м. На рисунке 3(d) точность расстояния рассчитывается как усредненное измеренное расстояние, вычтенное из фактического расстояния. Для измеряемого диапазона расстояний точность всегда лучше 1 см. На рисунке 3(e) точность расстояния используется как стандартное отклонение расстояния одного пикселя на 20×20 пикселей в центре массива. Точность выше 7,8 мм (среднеквадратичное значение) для всех измеренных точек на расстоянии до 1,6 м.
Обнаружение нескольких объектов было экспериментально продемонстрировано путем кодирования временного освещения или шаблонов экспозиции, что требует больших вычислительных затрат для восстановления 3D-изображений. Времяпролетный датчик с временным стробированием представляет собой альтернативное масштабируемое решение с помощью компактной пиксельной схемы и менее сложных вычислений.
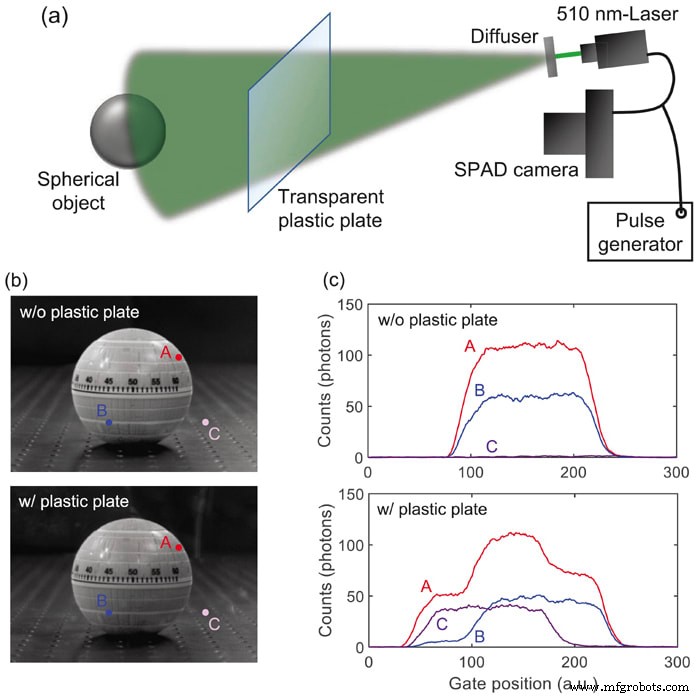
На рис. 4(а) показана экспериментальная установка:лазерный луч с длиной волны 510 нм и частотой 40 МГц рассеивается диффузором и используется для освещения сферической мишени. Камера SPAD синхронизируется с сигналом запуска лазера, и между камерой и объектом вставляется прозрачная пластиковая пластина. Расстояния от камеры до пластиковой пластины и объекта равны 0,45 м и 0,75 м соответственно. На рис. 4(b) показаны 2D-изображения интенсивности при комнатном освещении со вставленной пластиковой пластиной и без нее. Так как пластина практически прозрачна, на 2D-изображениях для этих двух случаев не наблюдается существенной разницы.
Измеренные профили временного стробирования для трех репрезентативных точек (A, B и C) представлены на рисунке 4(c). Без пластины временные профили стробирования для точек A и B показывают только один сглаженный сигнал прямоугольной функции с нарастающим фронтом вокруг положения стробирования 100 (один шаг положения, соответствующий 36 пс). Для точки C количество фотонов остается близким к нулю во всем измеренном диапазоне положения ворот, что указывает на то, что в этом пикселе не обнаружено отражающих объектов.
Для пластиковой пластины, напротив, профиль в точке A показывает двухступенчатые нарастающие фронты вокруг позиций 40 и 100 затвора. Учитывая, что измеренный профиль количества фотонов представляет собой свертку одной сглаженной прямоугольной функции и распределения интенсивности отраженных фотонов, двухступенчатый профиль убедительно свидетельствует о двойном отражении от пластиковой пластины и сферического объекта. Аналогичное поведение наблюдается в точке B, где наклон первого нарастающего фронта вокруг положения затвора 40 мягче, чем в точке A. Профиль в точке C показывает только один нарастающий фронт вокруг положения затвора 40, соответствующий отражению от пластика. пластина. Изменение наклона переднего фронта вокруг позиции 40 затвора между различными точками вызвано неравномерным отражением от поверхности пластиковой пластины.
Результаты демонстрируют способность камеры SPAD с временным стробированием выполнять пространственно перекрывающееся обнаружение нескольких объектов. Отметим, что предложенная схема может применяться для обнаружения более двух пиков отражения. Более точное сканирование окна виртуального затвора при постобработке позволяет систематически обнаруживать множественные пики. Минимальное разрешаемое расстояние между двумя соседними отражающими материалами принципиально ограничено конечным временем подъема или опускания профиля окна ворот, что соответствует 5-10 см в этом датчике SPAD.
В заключение, впервые сообщается о 1-мегапиксельном датчике изображения SPAD с временным стробированием. В исследованиях SPAD получение мегапиксельного датчика SPAD считалось одной из самых важных вех на протяжении более десяти лет. Датчик применяется для 2D-изображения с высоким динамическим диапазоном и 3D-изображения с высоким пространственно-временным разрешением. Насколько нам известно, пространственно перекрывающееся обнаружение нескольких объектов с однофотонной схемой временного стробирования было экспериментально продемонстрировано впервые.
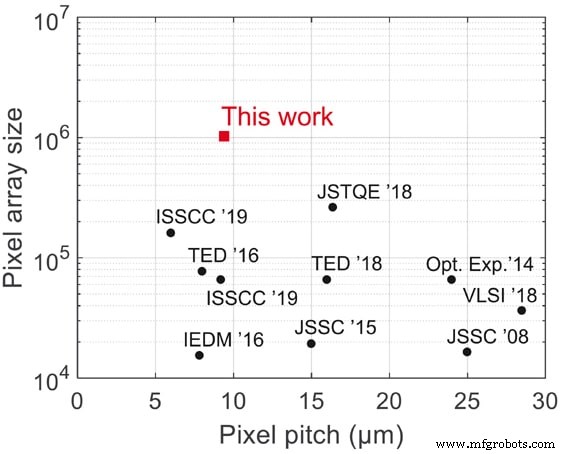
На рис. 5 показано современное сравнение шага пикселя SPAD и размера массива. Размер матрицы сенсора самый большой, почти в 4 раза больше, чем у современного сенсора, а шаг пикселя один из самых маленьких. Благодаря возможностям получения 2D- и 3D-изображений с высоким разрешением предлагаемый датчик будет полезен в широком спектре промышленных приложений, таких как безопасность, автомобилестроение, робототехника, биомедицина и научные приложения, включая квантовую визуализацию и сверхвысокоскоростную визуализацию. /Р>
Прочитайте полный отчет о технологии в научном журнале Optica .
Эту статью написал Эдоардо Шарбон, профессор EPFL Switzerland (Лозанна, Швейцария). Для получения дополнительной информации посетите здесь .
Датчик
- Камера
- Инвестиции в производственные технологии - постпандемия
- Читалка BrickPi
- Технология линейного перемещения
- Многокадровая безлинзовая камера
- Сканер тела высокого разрешения миллиметрового диапазона
- Руководство для поставщиков 2021:Датчики
- Пироэлектрический сэндвич-комбайн для сбора тепловой энергии
- Пленоптическая камера
- Массив наносенсоров E-Tongue