


Привод двигателей в системах Интернета вещей с питанием от батарей
Изучите методы проектирования драйверов двигателей, которые помогут продлить срок службы батарей в системах двигателей с батарейным питанием.
Многие системы с батарейным питанием и приложения Интернета вещей (например, интеллектуальные счетчики, интеллектуальные средства санитарии, видеодомофоны, роботизированные игрушки, средства личной гигиены и электронные замки) содержат двигатель, соленоид или реле. Взаимодействие между батареей и физикой двигателя порождает некоторые интересные конструкторские задачи, такие как надежная работа системы при изменении напряжения батареи, минимизация мощности в режиме ожидания для увеличения срока службы системы и подача больших токов на двигатель во время запуска и остановки.
В этой статье я дам несколько советов, которые помогут решить эти проблемы дизайна.
Обзор систем двигателей с батарейным питанием
Диапазон напряжения батареи, доступный драйверу двигателя, зависит от химического состава батареи, глубины разряда, температуры, тока нагрузки и количества элементов батареи, подключенных последовательно или параллельно. Хотя моделирование батареи - сложная наука, давайте начнем с простой модели батареи, использующей напряжение холостого хода (V OCV ), внутреннее сопротивление батареи (R BAT ) и напряжение на клеммах аккумулятора (В BAT ), как показано на рисунке 1 . .
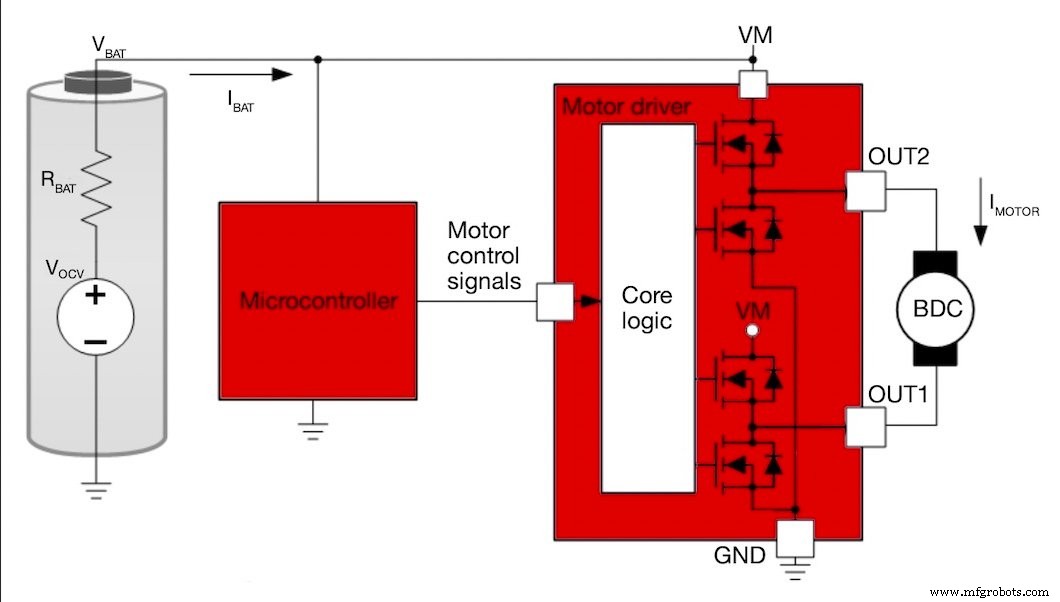
Рисунок 1. Блок-схема аккумуляторной системы с приводом двигателя и двигателем.
Таблица 1 показывает несколько примеров диапазонов напряжения батарей для батарей различного химического состава.
| Химический состав батареи и стек | V BAT полностью заряженного аккумулятора | V BAT разряженной батареи | R BAT | Вместимость |
| 2 AA (щелочные), Duracell OP1500 | 1,7 В / ячейку всего 3,4 В | 0,8 В / ячейка 1,6 В всего | 100–250 мОм / ячейка 200–500 мОм всего | 2400 мАч * |
| 3 AAA (щелочной), Panasonic LR03AD | 1,55 В / ячейка всего 4,65 В | 0,8 В / ячейка 2,4 В всего | 135 мОм / ячейка (в среднем) всего 405 мОм (в среднем) | 2640 мАч |
| 4 AA (щелочные), Energizer E91 | 1,5 В / ячейку 6 В / ячейка | 0,8 В / ячейка всего 3,2 В | 150–300 мОм / ячейка (свежая) Всего 600–1200 мОм (свежее) | 2500 мАч * |
| 1 литий-ионный, Panasonic NCR18650BF | 4,2 В | 2,5 В | 77 мОм * | 3200 мАч |
| 2 литий-полимерный, Farnell SR674361P | 4,2 В / ячейка 8,4 В всего | 2,75 В / ячейка всего 5,5 В | 160 мОм / ячейка всего 320 мОм | 2000 мАч |
* Параметры рассчитываются на основе других параметров из таблицы данных о батарее
Таблица 1. Приблизительные параметры батарей для различного химического состава и стека.
R BAT и V OCV являются ключевыми участниками V BAT изменение срока службы батареи. По мере разряда аккумулятора V OCV уменьшается, а R BAT увеличивается. Поскольку нагрузка потребляет ток от АКБ (I BAT ), V BAT уменьшается из-за падения напряжения на R BAT .
Рисунок 2 показывает взаимосвязь между V OCV , R BAT и я BAT в течение всего срока службы батареи.
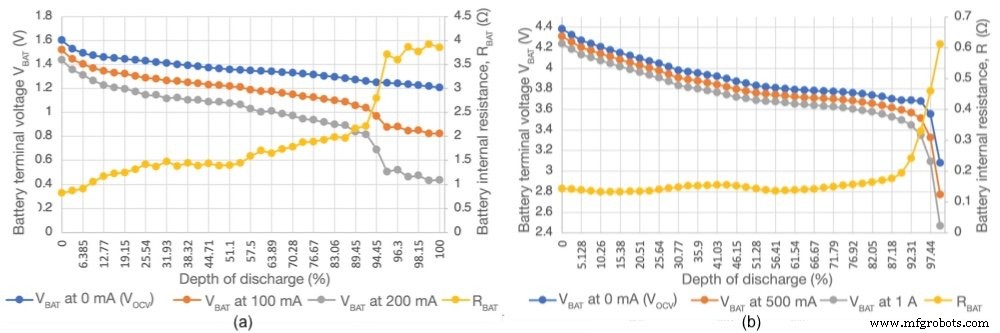
Рисунок 2. Графики VBAT и RBAT для щелочного (а) и литий-ионный (б) батареи для различных токов нагрузки батарей (IBAT) на основе данных из базы данных химической идентификации TI.
Глубина разряда (DoD) представляет собой срок службы батареи в процентах от полной емкости заряда батареи, выраженной в миллиампер-часах (мАч). 100% DoD представляет собой полностью разряженную батарею.
Дизайн для Wide V BAT Диапазон
Поскольку V BAT изменения с DoD и I BAT , номинал шины питания для драйвера двигателя должен соответствовать диапазону возможных напряжений аккумуляторной батареи. Например, многие драйверы двигателей, разработанные для систем с напряжением 24 В, имеют минимальную шину питания 4,5 В. При последовательно подключенных четырех щелочных батареях драйвер двигателя с минимальным номиналом питания 4,5 В может отключиться, используя блокировку пониженного напряжения, прежде чем батареи полностью разрядятся. слив.
DRV8210 и DRV8212 от Texas Instruments (TI) являются примерами драйверов двигателей, разработанных для приложений с батарейным питанием с номинальным напряжением питания от 1,65 В до 11 В. Это соответствует максимальному напряжению для двухэлементной литиевой аккумуляторной батареи (8,4 В) или почти разряженная батарея из двух щелочных батарей (1,65 В).
Разработка для режима ожидания с низким энергопотреблением
Системы с батарейным питанием проводят большую часть своего срока службы в режиме ожидания. Например, потребители могут управлять жалюзи с электроприводом только два раза в день или блокировать и разблокировать электронный замок до 20 раз в день. Клапан на счетчике газа или воды может срабатывать только один раз в год. Ток в режиме ожидания всей системы должен быть низким, чтобы обеспечить длительный срок службы батарей в этих системах.
Добавление переключателей нагрузки на шины питания периферийных устройств в системе - это один из способов снизить ток в режиме ожидания. Другой способ - использовать устройства с низким током в режиме ожидания, оптимизированные для аккумуляторных батарей. DRV8210 и DRV8212 имеют токи сна <84,5 нА, что помогает снизить потребление тока системой в режиме ожидания. Другие способы уменьшить ток в режиме ожидания - это исключить резистивные делители и установить логические выводы устройства с понижающими резисторами на 0 В, когда они не работают.
Управление большими токами для снижения энергопотребления и увеличения срока службы
Большие токи от двигателей создают две проблемы в аккумуляторных системах:они непродуктивно расходуют энергию и могут привести к преждевременному переходу системы в состояние блокировки низкого заряда батареи из-за падения напряжения на R BAT . Есть две основные причины больших токов двигателя:пусковой ток при запуске двигателя и ток остановки. Рисунок 3 показывает пример этих токов.
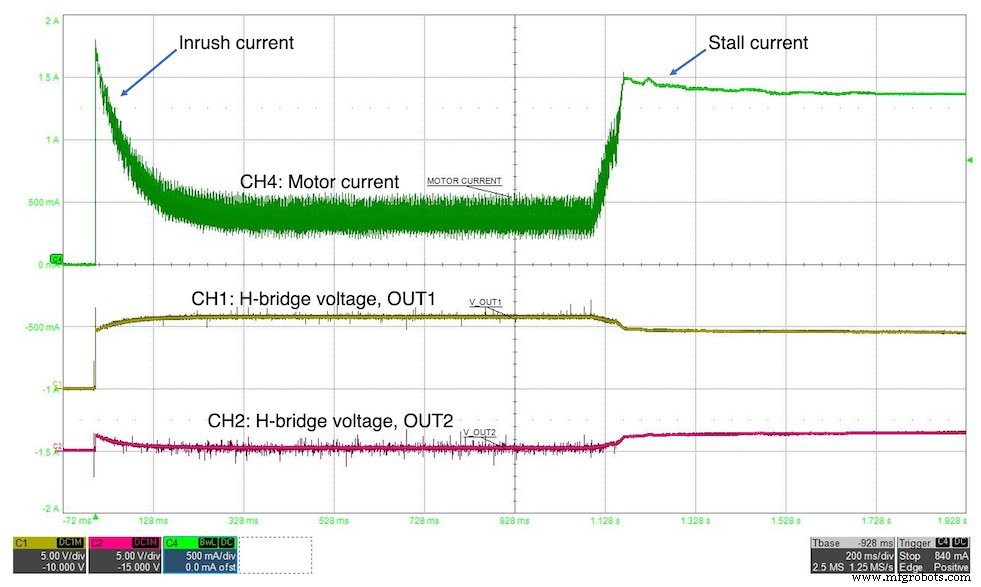
Рисунок 3. Пусковые и тормозные токи.
Реализация программы плавного пуска двигателя путем линейного увеличения рабочего цикла с широтно-импульсной модуляцией может уменьшить большой пусковой ток во время запуска двигателя. Рисунок 4 показаны примеры реализации жесткого и мягкого запуска для разряженного стека из четырех батареек AAA.
На рис. 4 (а) , пусковой ток двигателя вызывает падение напряжения аккумулятора во время жесткого запуска из-за падения напряжения на R BAT . Если эта система сбрасывается или переходит в состояние блокировки при пониженном напряжении около 3,5 В, двигатель не сможет двигаться дальше первоначального запуска.
Рисунок 4 (б) показывает, как использование плавного пуска приводит к более низкому падению напряжения на шине питания, что может помочь немного увеличить срок службы системы с разряженной батареей.
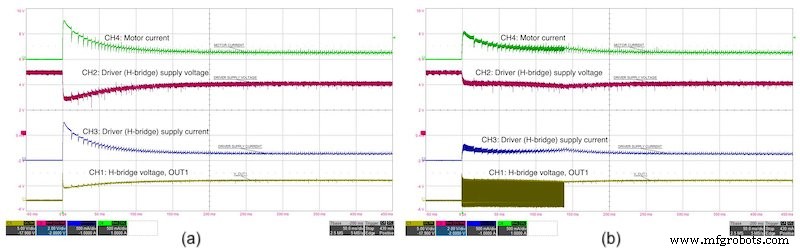
Рисунок 4. Жесткий- (а) и мягкий старт (б) пусковой ток на четырех разряженных батареях AAA последовательно с использованием DRV8210. Показанная здесь процедура плавного пуска увеличивает рабочий цикл от 0% до 100% во время запуска двигателя.
Чтобы помочь контролировать токи остановки, добавление резистора для измерения тока может помочь микроконтроллеру обнаружить остановку и отключить драйвер двигателя перед тем, как потреблять большие токи остановки в течение длительного периода времени. Условия остановки могут возникать из-за непреднамеренной механической блокировки или механической нагрузки, достигающей конечного упора (например, полностью задействованный засов в интеллектуальном замке).
Рисунок 5 показывает пример реализации системы с использованием DRV8212.
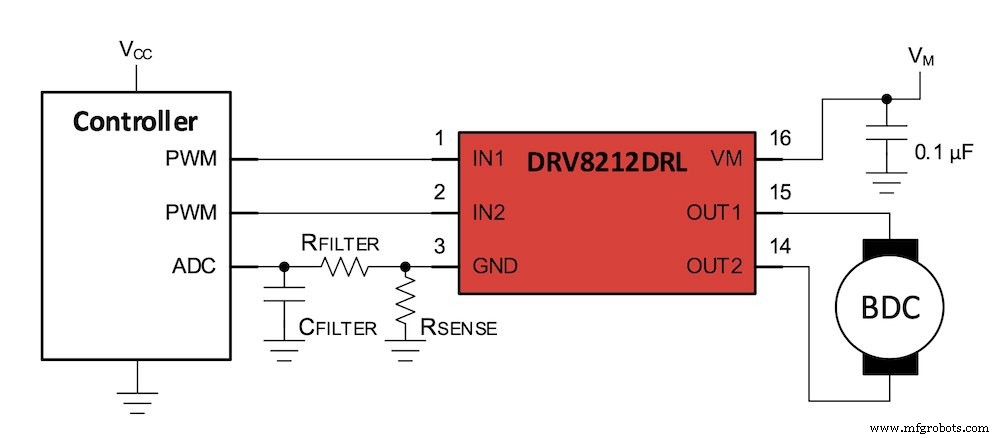
Рисунок 5. Пример блок-схемы реализации обнаружения останова с помощью DRV8212.
Аналого-цифровой преобразователь микроконтроллера измеряет напряжение измерительного резистора и сравнивает это напряжение с пороговым значением, сохраненным во встроенном программном обеспечении. Если измерение тока превышает пороговое значение на определенное время, микроконтроллер отключает драйвер двигателя для экономии энергии. Важно настроить продолжительность времени обнаружения опрокидывания, чтобы пусковой ток случайно не вызвал обнаружение опрокидывания.
Рисунок 6 показывает профиль тока двигателя в состоянии остановки с реализованным обнаружением остановки, тогда как Рисунок 3 показывает форму кривой тока двигателя без обнаружения опрокидывания.
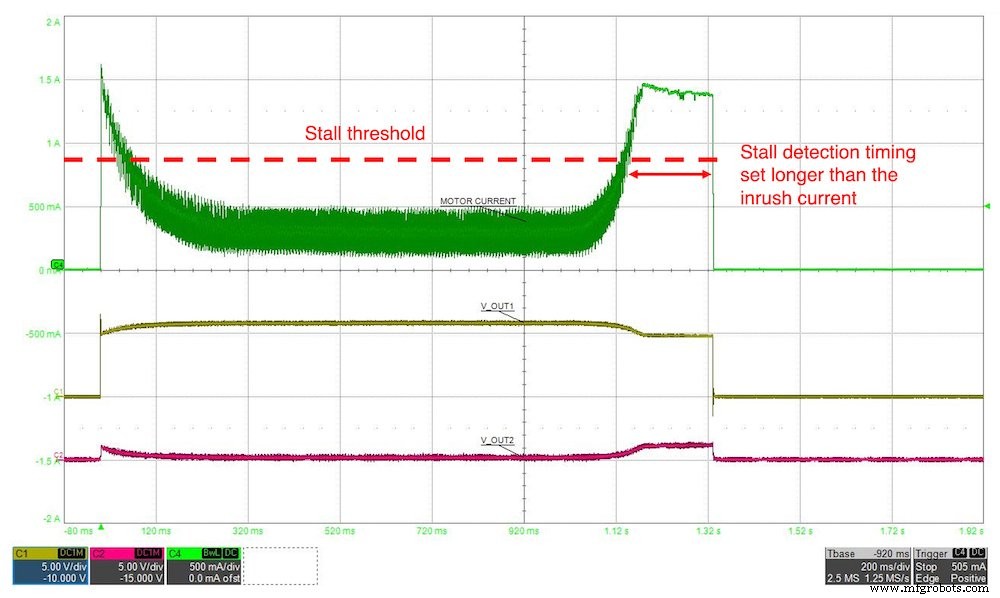
Рисунок 6. Профили тока двигателя с обнаружением опрокидывания.
Производители аккумуляторов измеряют емкость аккумулятора в мАч, поэтому ограничение как величины пускового тока, так и продолжительности тока покоя помогает продлить срок службы аккумулятора.
Заключение
Разработка систем с батарейным питанием, в которых используются двигатели, может оказаться сложной задачей из-за ограниченного срока службы батареи, колебаний напряжения батареи и больших токов двигателя. Использование драйвера двигателя, рассчитанного на диапазон напряжения батареи, упрощает конструкторские работы за счет устранения дополнительных повышающих преобразователей и обеспечения минимального рабочего напряжения батареи.
Сведение к минимуму общего тока системы в режиме ожидания и использование драйвера двигателя с режимом сна с низким энергопотреблением снижает потери энергии от батареи. Методы плавного пуска и обнаружения останова также могут помочь увеличить срок службы аккумуляторных батарей за счет уменьшения величины и продолжительности больших токов двигателя в системе.
Используя эти методы, разработчики систем могут продлить срок службы систем с батарейным питанием, таких как интеллектуальные санитарные изделия, моторизованные жалюзи, электронные интеллектуальные замки и другие.
Отраслевые статьи - это форма контента, позволяющая отраслевым партнерам делиться полезными новостями, сообщениями и технологиями с читателями All About Circuits, что не подходит для редакционного контента. Все отраслевые статьи подлежат строгим редакционным правилам с целью предлагать читателям полезные новости, технические знания или истории. Точки зрения и мнения, выраженные в отраслевых статьях, принадлежат партнеру, а не обязательно All About Circuits или ее авторам.
Интернет вещей
- Исследование сотового Интернета вещей:стоимость, батарея и данные
- Интеллектуальное производство и Интернет вещей являются движущей силой следующей промышленной революции
- Технология LoRa способствует внедрению Интернета вещей, меняя жизни
- Сильное руководство способствует внедрению Интернета вещей
- Шесть шагов для защиты встроенных систем в IoT
- Там, где старое встречается с IoT, интеграция SaaS
- Что такое безопасность Интернета вещей?
- Партнерство направлено на бесконечное время автономной работы устройств IoT
- Промышленный Интернет вещей — это не панацея, которую нам обещали… Пока
- Применение промышленных систем мониторинга качества воздуха с использованием Интернета вещей