


ROS2 + DDS:сыграйте снова
Чтобы воспроизвести записанные данные обратно в ROS2:
rtireplay -cfgFile ros2_replay.xml -cfgName simple_example
Результаты
Теперь я собрал данные ROS2 LiDAR, сгенерированные во время серии сеансов автосимулятора, и все они, как и ожидалось, можно воспроизводить по запросу:
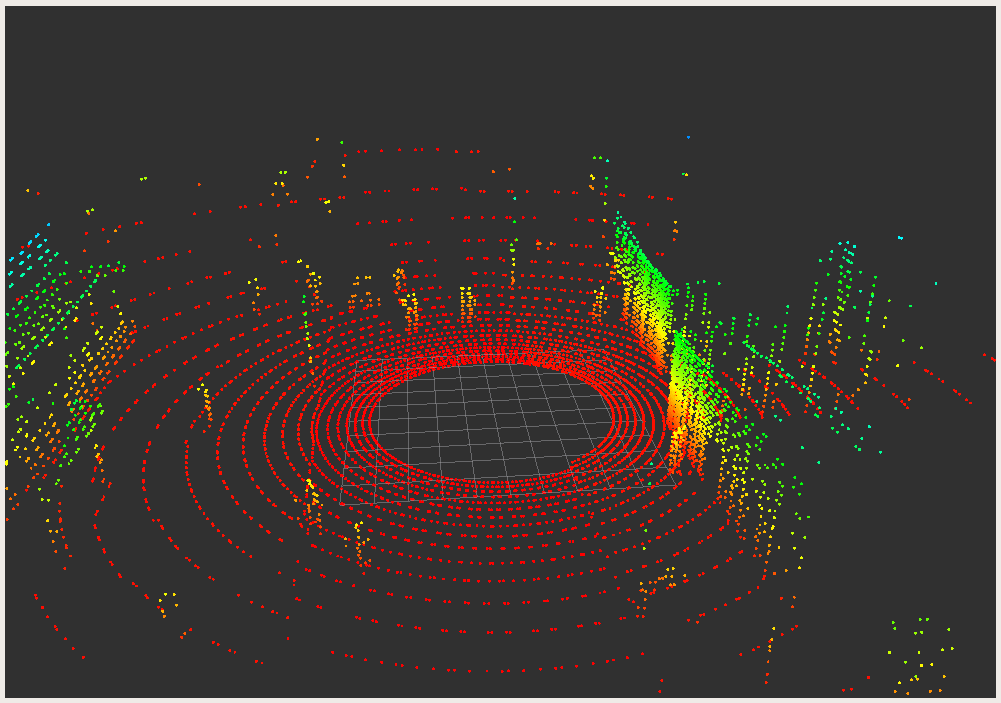
Отлично! Теперь я могу воспроизводить данные LiDAR по запросу без специального автомобильного симулятора (или реального транспортного средства).
Было весело поиграть с в XML-файле воспроизведения для ускорения воспроизведения данных LiDAR. Это было похоже на пассажира в * очень * быстрой машине!
Для получения дополнительной информации о ROS2 и DDS ознакомьтесь с предыдущими сообщениями в блоге RTI:
Полевое руководство по взаимодействию и объединению экосистем
Интернет вещей
- Open DDS против программного обеспечения RTI DDS
- MQTT и DDS:межмашинное взаимодействие в IoT
- Connext DDS и промышленный Интернет вещей:5 главных вещей, которые нужно знать
- Четвертая промышленная революция
- Сохранение совместимости данных в IoT
- Что мне делать с данными ?!
- Демократизация Интернета вещей
- 5 Тенденции в области связи
- 10 лучших платформ IIoT
- Будущее центров обработки данных