


Автоматическая катапульта для бросания корма, мячей и прочего для домашних животных!
Компоненты и расходные материалы
 |
| × | 1 | |||
| × | 3 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 10 | |||
 |
| × | 2 | |||
 |
| × | 1 |
Приложения и онлайн-сервисы
 |
|
Об этом проекте
Здравствуйте и добро пожаловать в мой первый проект!
Наша собака ОБОЖАЕТ свою еду, она буквально съест ее за считанные секунды. Я придумывал способы замедлить это, от шариков с едой внутри до разбрасывания ее на задний двор. Удивительно, но теперь она похожа на пылесос и может очень быстро находить и есть пищу. Итак, вернемся к чертежной доске, и я придумал это устройство, чтобы помочь ей замедлиться и наслаждаться едой :)
КОНЦЕПЦИЯ

Пожалуйста, уделите несколько секунд просмотру двух видео, они многое объясняют.
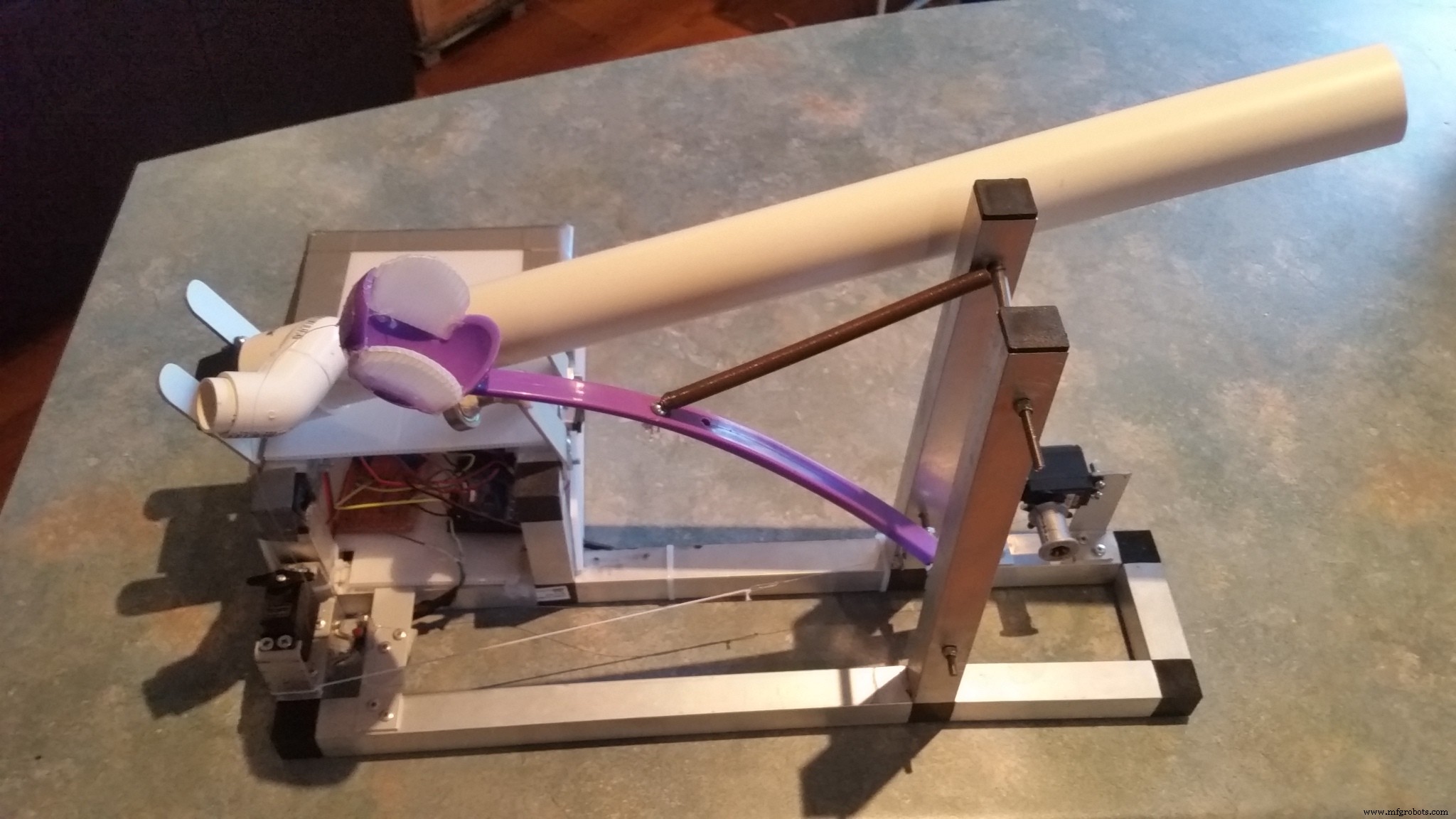
Но, на словах, основная концепция заключается в том, что сервопривод Rotator вращается и опускает рычаг катапульты. Он делает это до тех пор, пока не коснется концевого выключателя. Затем сервопривод спускового механизма переходит в положение удержания, которое удерживает рычаг катапульты. Затем сервопривод Rotator перематывается в исходное положение и готов к следующему броску.
Сервопривод доставки еды вращает трубу и подает еду (или другие предметы) в контейнер / головку рукоятки катапульты. Затем сервопривод спускового механизма поворачивается, позволяя пружине тянуть назад рычаг катапульты и подбрасывать пищу.
При тестировании эта установка катапультировала печенье с кормом для собак на расстояние более 10 метров, при этом еда катилась. Регулировка сервоприводов и замена пружины полностью изменит это.
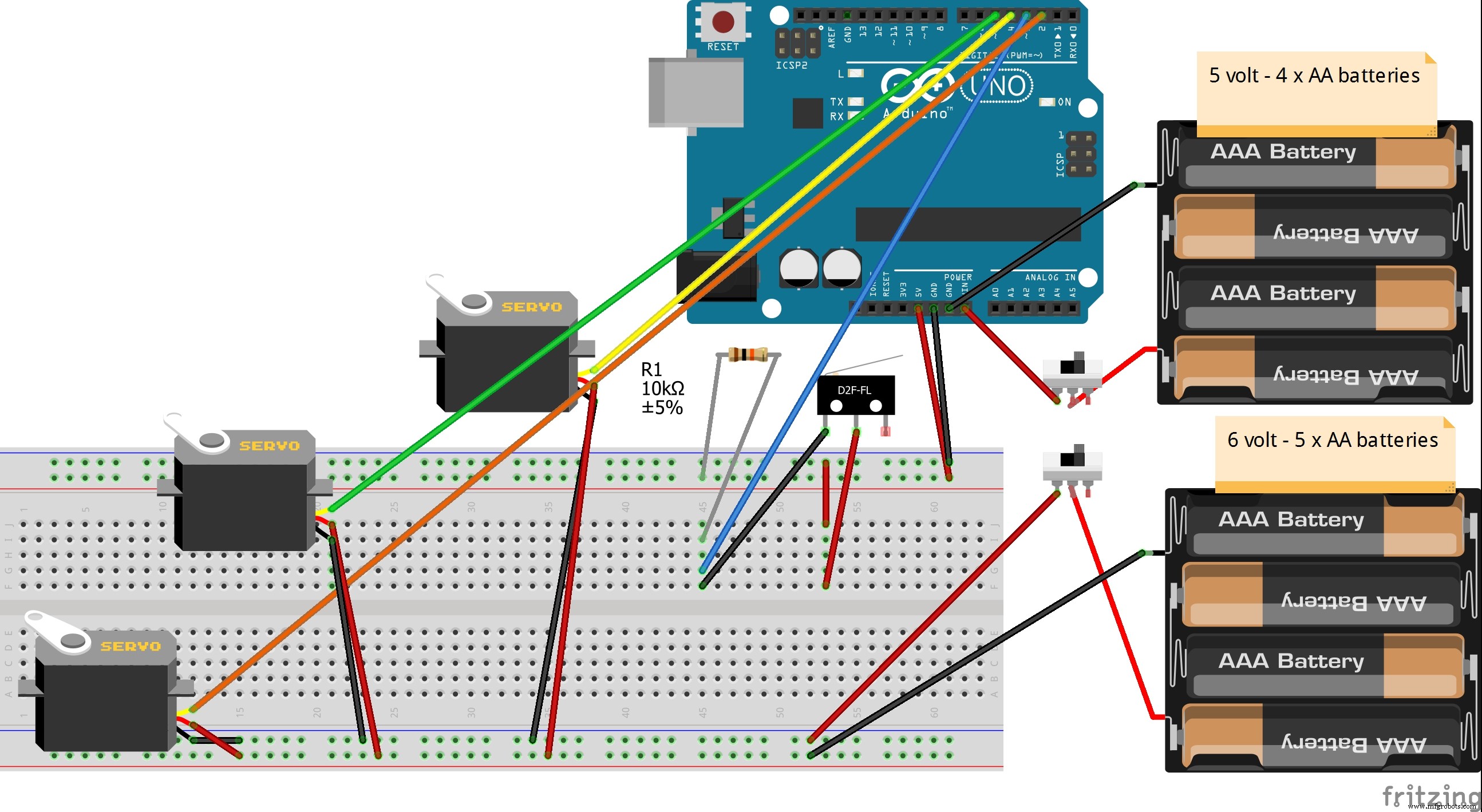
ЭЛЕКТРОНИКА
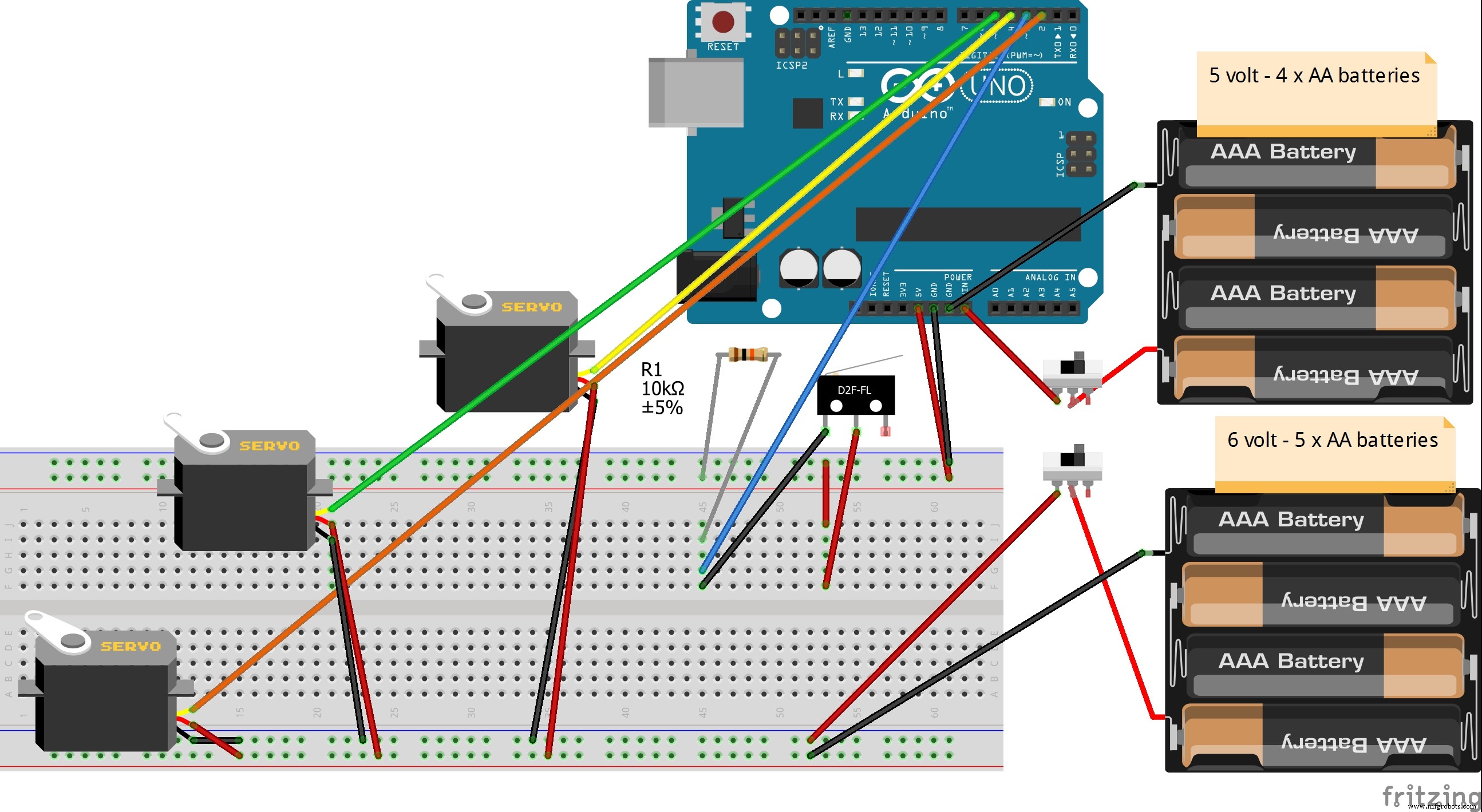
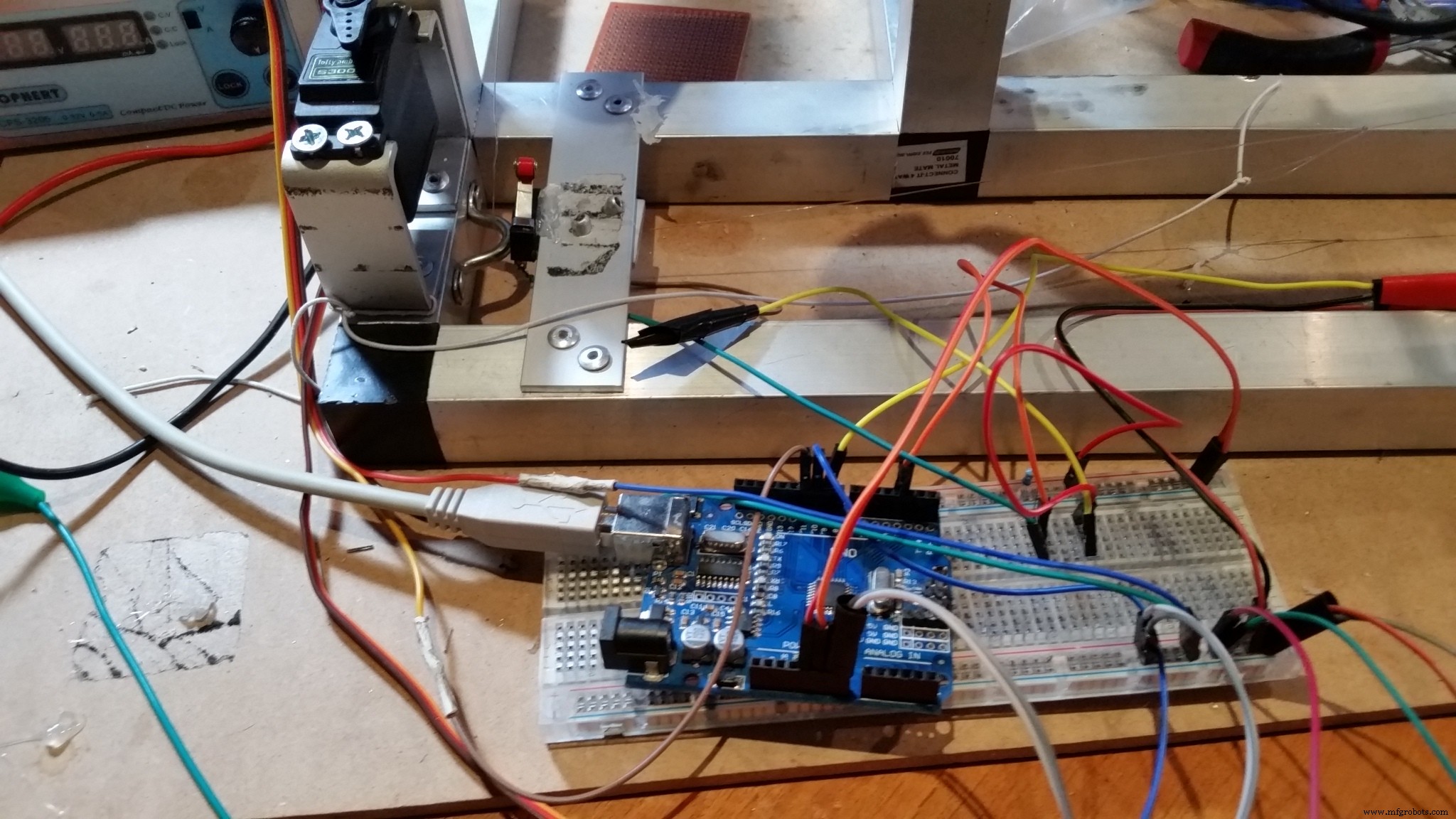
Я постараюсь быть лаконичным в этом проекте не только для простоты, но и потому, что эту катапульту можно сделать 100 различными способами. Его можно масштабировать, создавать различные конструкции и использовать различные материалы. Помимо электроники и сервоприводов, остальное полностью зависит от того, что у вас есть под рукой, или от вашего бюджета.
Я не буду объяснять пошагово, как делать электронику, на эту тему есть масса впечатляющих проектов. Тем более, что я новичок, наверное, ошибался и тебе лучше поучиться у профессионалов;)
МАТЕРИАЛЫ
- Arduino Uno R3 - хотя любая Arduino справится с этой задачей.
- 2 сервопривода 180 градусов
- 1 сервопривод непрерывного вращения.
- Концевой выключатель
- резистор 10 кОм.
- 4 батарейки AA и футляр.
- 1 батарейка для фонаря на 6 В - может быть (и я буду) заменена 5 батареями AA, соединенными вместе.
- 2 переключателя - подойдут любые, даже самые простые
- Соединительные кабели - их много;)
- Макетная плата - для тестирования
МАТЕРИАЛЫ - ПРИ СОЗДАНИИ ПОСТОЯННЫХ
Плата Perf 2 x 2-контактные разъемы - опционально, вы можете жестко подключить батарейные отсеки.
СЕРВИСЫ
Я купил пару дешевых сервомашинок Lofty Ambition S3003 180 градусов на eBay. Вам нужно что-то вроде этого ворчания, не пытайтесь покупать меньшее, так как они не смогут выдержать нагрузку. Но они не обязательно должны быть дорогими от Jaycar (австралийский магазин электроники) или тому подобного. Я использовал сервопривод непрерывного вращения FS5106R. Модель не важна, но вам определенно понадобится сервопривод, чтобы иметь хотя бы эти характеристики.
Если вы сделаете катапульту сильнее или крупнее, убедитесь, что у вас есть соответствующие сервомашинки большего размера.
СТРУКТУРА

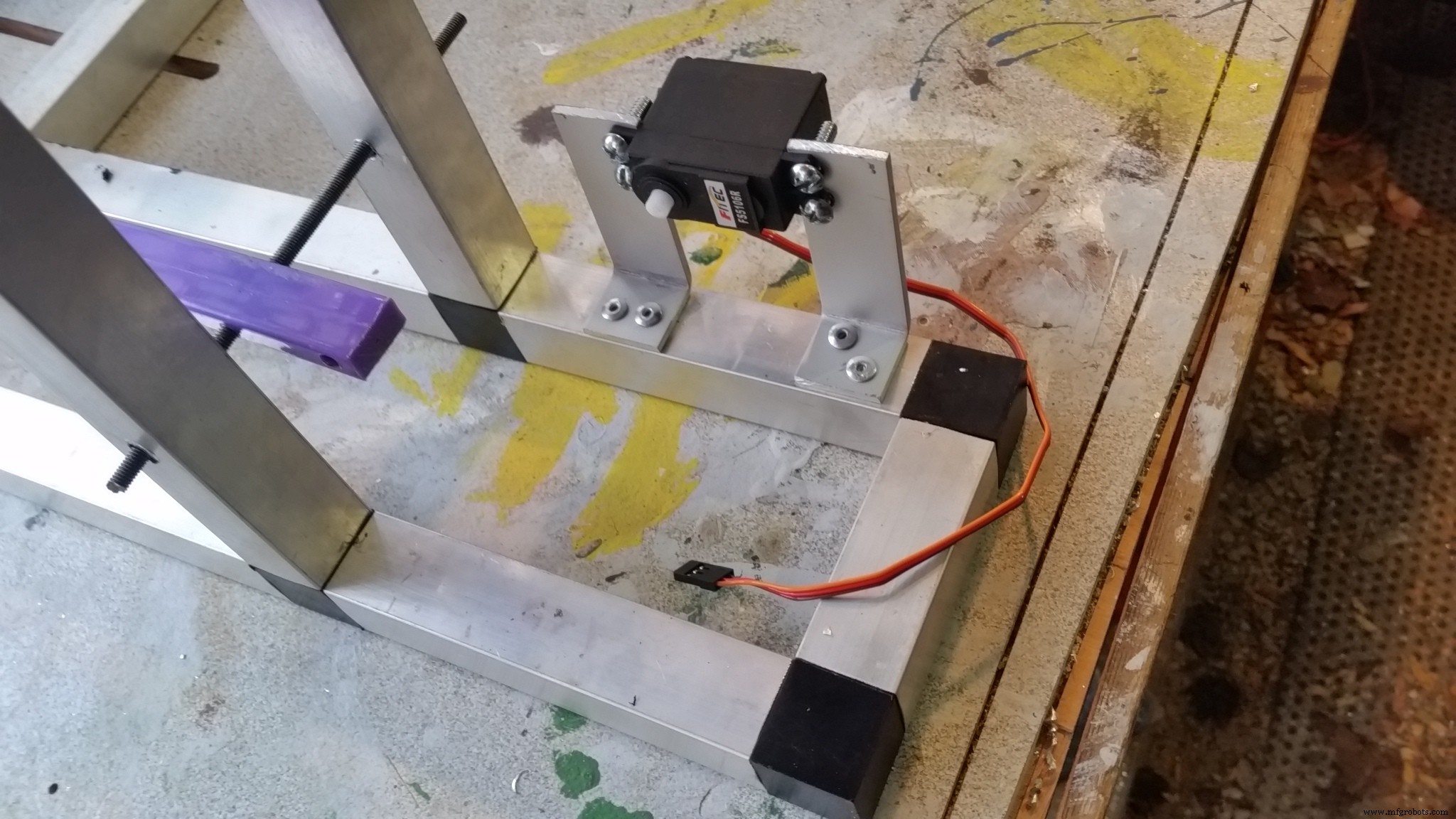


Как было сказано ранее, структура полностью зависит от вас. Сделать его можно из пластика, дерева или металла. Размер тоже на ваше усмотрение. Если вы хотите иметь возможность катапультировать больше еды (или других вещей), сделайте ее меньше или больше. Итак, из-за этих моментов я не буду вдаваться в подробности того, как я создал свою структуру. Я очень рад ответить на все вопросы.
Я БОЛЬШОЙ поклонник повторного использования / переработки / повторного использования и т. Д. Так много из того, что я использовал, было у меня в сарае. Я сделал большую часть своей конструкции из алюминия, который у меня был в связи с другим проектом. Основная конструкция состоит из квадратных алюминиевых трубок 25 мм и пластиковых разъемов «connect-it». Кронштейны для двигателей я сделал из алюминия шириной 25 мм и шириной 3 мм.
Концепция доставки еды была взята из этого проекта:
https://www.hackster.io/circuito-io-team/iot-pet-feeder-10a4f3 от https://www.hackster.io/circuito-io-team - им большое спасибо!
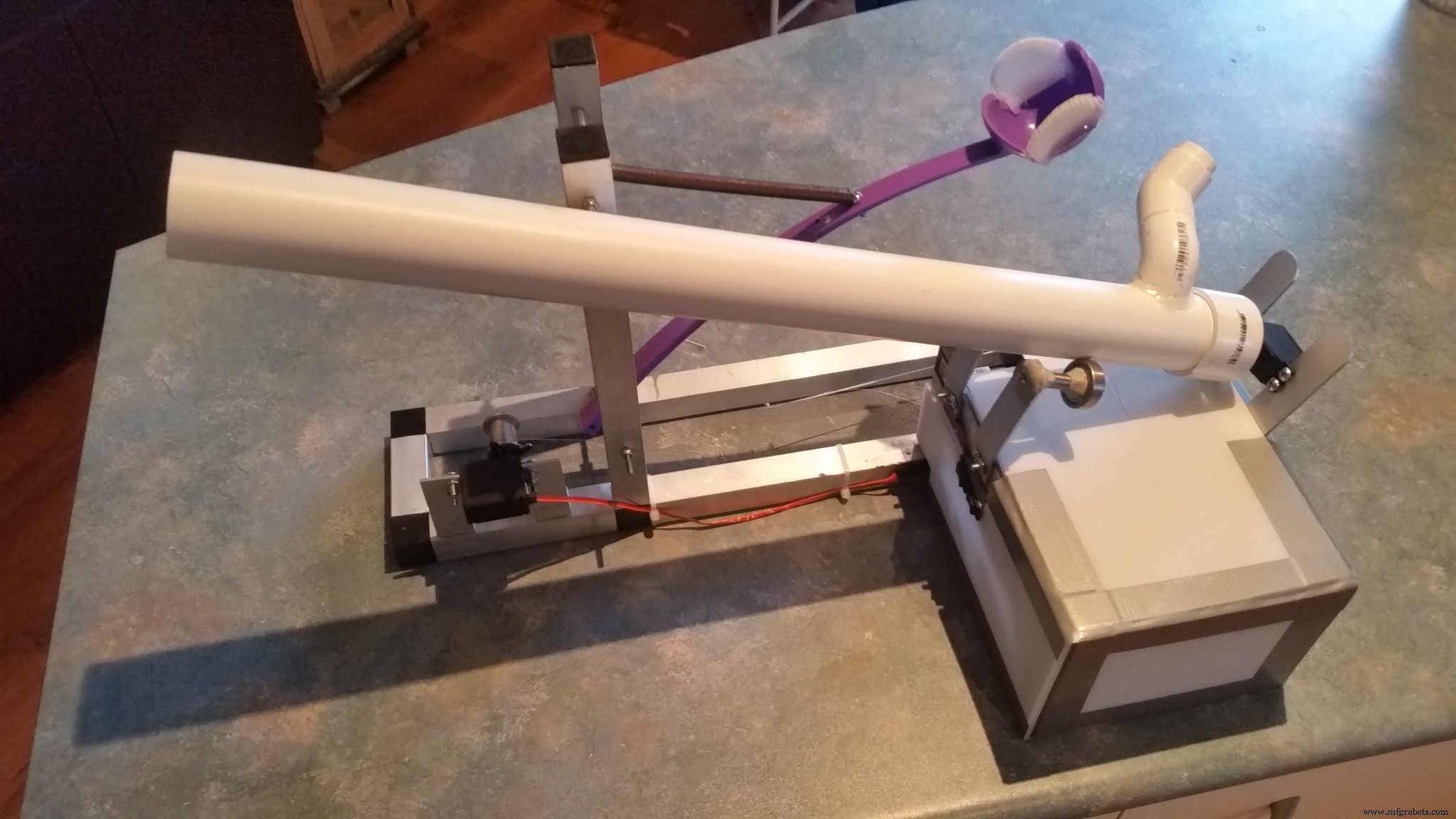
Держатель, который я сделал, сделан из 40-миллиметровой трубы ПВХ, которую я купил в местном хозяйственном магазине. Фактическая рука представляет собой два соединителя под углом 45 градусов меньшего размера, соединенных вместе и приклеенных горячим клеем к большей трубе. Трубка из ПВХ большего размера имеет еще один соединитель под углом 45 градусов, чтобы облегчить добавление в печенье корма для домашних животных (или другие вещи). Все сделано для того, чтобы их можно было разобрать для любых модификаций.
Остальная часть рычага подачи еды была спроектирована так, чтобы допускать легкое круговое движение - чтобы облегчить работу сервопривода. Есть способы получше (если у вас есть инструменты) сделать это, но я постарался. Я сделал несколько кронштейнов, разрезал металлический стержень и использовал продукт под названием «замесить его», чтобы прикрепить стержни к кронштейнам и подшипникам. Как вы можете видеть на видео, труба из ПВХ плавно поворачивается над подшипниками, и они снимают большую часть веса (и необходимого крутящего момента) с сервопривода.
Рукоять катапульты - метатель теннисного мяча из дешевой лавки за 2 доллара.
Катапультирующая сила взята из старой пружины, которую я нашел в своей мастерской - это видно по ржавчине. Размер, тип и сила пружины имеют решающее значение для того, насколько сильна и эффективна катапульта. Вам нужно будет сбалансировать силу сервопривода, силу пружины, гибкость руки катапульты. Достичь этого баланса непросто и действительно зависит от того, что вы ищете. Я выбрал дизайн, который оставляет движение в руке, что создает некоторую непредсказуемость в выборе места назначения еды. Верхняя часть рукоятки катапульты, в которой находится печенье, также способствует непредсказуемости. Больше удовольствия для питомца от поиска корма.
Рычаг катапульты тянется вниз с помощью лески через небольшую металлическую ручку (или кормушку, в зависимости от того, как вы ее используете), вниз под платформу, которая удерживает концевой выключатель (подробнее об этом позже), по всей длине конструкции через другую металлическую ручку (чтобы она не запутывалась), затем прикрепляемую к шпинделю (я использовал пластиковую вещь, которая удерживает вату для шпинделя на Вращателе), которая прикрепляется к непрерывному сервоприводу. Кроме того, я использовал тонкую и слабую резинку, прикрепленную к леске и скобам спускового крючка. Это гарантирует, что когда Rotator разматывается, леска нигде не заедает.
Я использовал этот туннельный сердечник - универсальный пластиковый лист - служебную плату с двойными стенками, чтобы упростить создание корпуса для батарей и электроники.
Структура очень прочная, но при этом довольно легкая. Самая тяжелая его часть - это фонарь, который вскоре будет заменен аккумуляторными батареями AA.
ИЗВЛЕЧЕННЫЕ УРОКИ И БУДУЩИЕ МОДИФИКАЦИИ
Как и во всем, в чем вы не являетесь мастером, на этом пути всегда есть чему поучиться. В этом проекте, ну, скажем так, вам наскучит мой список, прежде чем вы дойдете до конца;)
Одна из самых больших проблем - засорение продуктами питания. Эта рука для доставки еды пришла из проекта, но, к сожалению, я не могу ее найти. Время от времени он не доставляет печенье, но это хорошо, он заставляет питомца гадать! Но в целом работает очень хорошо.
Я построил конструкцию из алюминия, потому что наша собака не ласковая, поэтому ей нужно держаться за нее. К счастью, пока все хорошо.
Я буду улучшать рукоять катапульты, чтобы она выглядела немного сексуальнее. Большинство важных элементов можно разбить, чтобы обеспечить доступ. например доставка еды, корпус для электроники.
В общем, очень интересный проект, и нашей собаке он нравится! Я очень рад предоставить любые ответы или советы по любому поводу.
Большое спасибо Хакстеру и вам за то, что вы прочитали об автоматической катапульте.
Код
- Автоматическая катапульта - код Arduino
Автоматическая катапульта - код Arduino Arduino
/ * * Автоматическая подмена корма для домашних животных, Натан Кинг, июнь 2018 г. * / # includeint FoodDeliveryReleasePosition =115; int FoodDeliveryHoldPosition =0; int TriggerReleasePosition =90; int TriggerHoldPosition =0; int limit_switch =3; int switch_state =0; Сервопривод доставки еды; // создаем сервообъект для управления доставкой еды armServo trigger; // создаем сервообъект для управления триггеромServo rotater; // создаем сервообъект для управления вращателем void setup () {rotater.attach (2); // присоединяет серво-вращатель trigger.attach (4); // подключает сервопривод триггера fooddelivery.attach (5); // подключает сервопривод доставки еды pinMode (limit_switch, INPUT); Serial.begin (9600);} цикл void () {rotater.write (89); // останавливает движение сервопривода ротатора - необязательно, если у вас хороший сервопривод;) delay (500); // Начальные позиции fooddelivery.write (FoodDeliveryHoldPosition); задержка (1000); trigger.write (TriggerHoldPosition); задержка (1000); trigger.write (TriggerReleasePosition); delay (1000); // цикл концевых выключателей для остановки сервопривода поворотного устройства switch_state =digitalRead (limit_switch); Serial.println (switch_state); в то время как (switch_state ==HIGH) {switch_state =digitalRead (limit_switch); Serial.println («Выключатель выключен»); rotater.write (75); // запускает Rotator по часовой стрелке со скоростью xx (0-255)} Serial.println ("Переключатель включен"); rotater.write (89); // останавливает сервопривод поворотного устройства // Удерживает рычаг катапульты на спусковом крючке и сбрасывает поворотный механизм в исходное положение trigger.write (TriggerHoldPosition); задержка (1000); rotater.write (110); задержка (4500); rotater.write (89); задержка (2000); // Доставка еды в катапульту fooddelivery.write (FoodDeliveryReleasePosition); задержка (500); fooddelivery.write (FoodDeliveryReleasePosition); // ждем, пока упадет еда delay (1000); fooddelivery.write (FoodDeliveryHoldPosition); delay (150); // Добавляем задержку между доставкой еды и срабатыванием триггера rotater.write (89); задержка (1000); // Отпустить катапульту !! trigger.write (TriggerReleasePosition); задержка (3000); // задержка для питомца, чтобы найти еду - отредактируйте это, чтобы изменить скорость доставки еды :)}
Схема
Производственный процесс
- Гигиенический дизайн для пищевой и перерабатывающей промышленности
- Контроллер, советы по выбору регистратора для продуктов питания и напитков
- Суперконцентраты красителей на основе ацеталей для автомобилей и др. на основе носителей с низким уровнем вы…
- B&R представляет высокопроизводительный компьютер для автономных сельскохозяйственных и строительных машин
- Советы по обработке титана на станках с ЧПУ:аэрокосмическая отрасль и не только
- Автоматическая скользящая передняя бабка для швейцарского и серийного точения
- Советы по нанесению смазки для металлов:избегайте чрезмерного смазывания и т. д.
- Инвар:умные складские тенденции на 2021 год и далее
- Автоматические торговые автоматы для продажи продуктов питания – универсальность продукта
- Когда и как выбрать автоматический бустерный насос для дома