


Бот, читающий человек
Компоненты и расходные материалы
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Приложения и онлайн-сервисы
 |
|
Об этом проекте
Привет, Гайзз ...
Я верю, что во время этой пандемии все дома и в безопасности.
Я создал новый проект под названием Human Follow Bot.
посмотрите видео целиком, чтобы сделать этот проект дома.
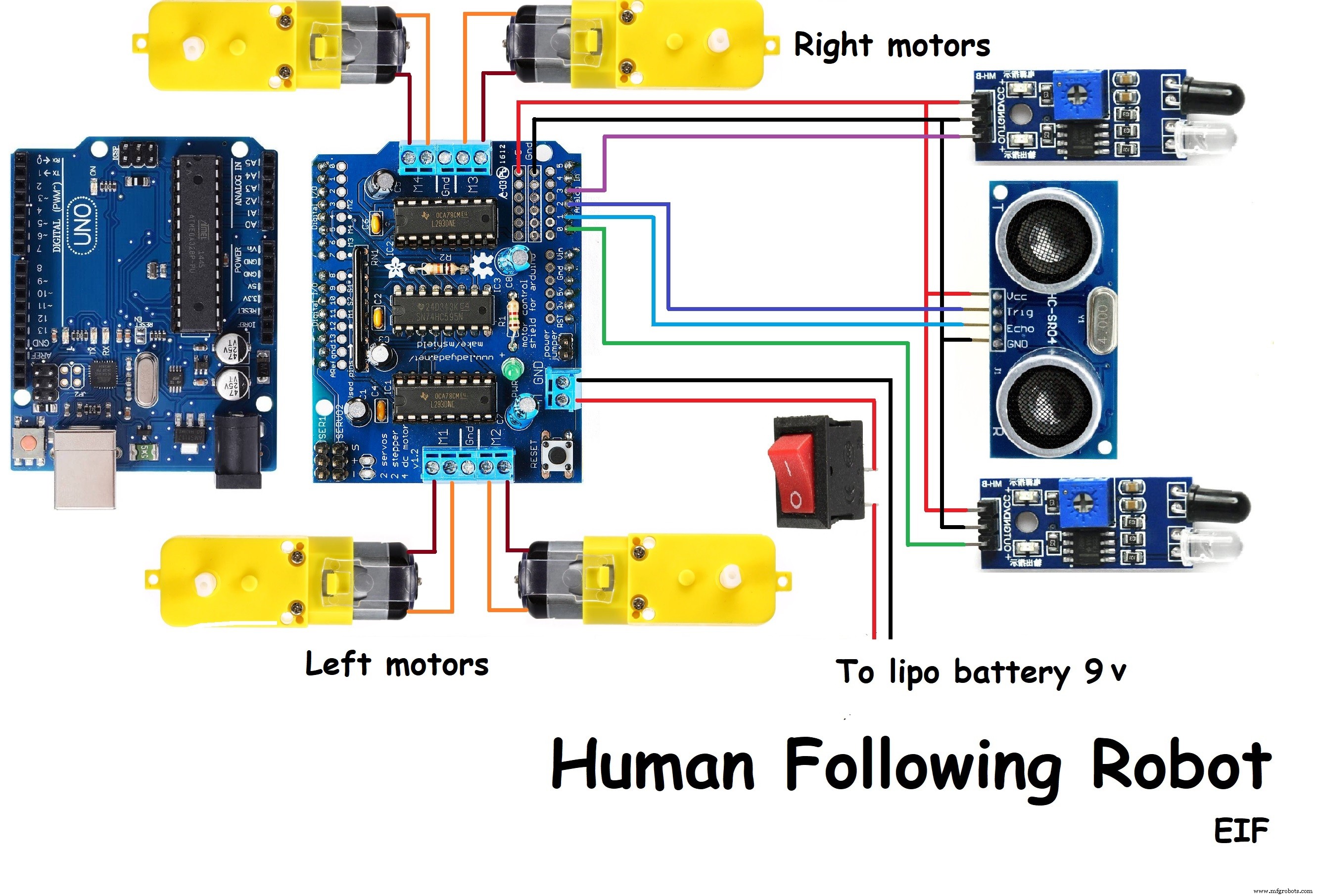
В нем используются 2 ИК-датчика и ультразвуковой датчик. ИК-датчики используются для отслеживания человека или объекта, а ультразвуковой датчик используется для перемещения робота назад.
Если вам нравится этот проект, уважайте его.
Дайте мне предложения, чтобы я мог улучшить его, или любые отзывы, которые вы хотите оставить на моем канале YouTube.
ссылка:https://studio.youtube.com/channel/UCaXI2PcsTlH5g0et67kdD6g
Также вы можете дать мне предложения по «Что я сделал в следующем проекте?»
Stepstomakethisproject:
1. Соберите компоненты, такие как Arduino, мотор-редукторы постоянного тока с колесами, 2 ИК-датчика, ультразвуковой датчик, серводвигатель, картон, щит водителя двигателя l293d, аккумулятор 9 В, переключатель, перемычки и т. Д.
2. Возьмите картон и поместите на него все 4 мотора с колесами, чтобы получилась машина.
3. Разместите ИК-датчики на автомобиле.
4. Наклеить серводвигатель на машину.
5. Поместите ультразвуковой датчик в коробку и добавьте к нему ручку, после чего подключите его к серводвигателю.
6. Подключите моторный щит Arduino и l293d к автомобилю.
7. Выполните подключения, как показано на принципиальной схеме.
8. Загрузите код и подключите переключатель с аккумулятором к щитку драйвера двигателя l293d.
Отрегулируйте чувствительность ИК-датчиков.
Ваш проект готов ... !!!
Посетите мой канал на YouTube один раз и увидите больше интересных проектов.
"Электроника - это развлечение"
Если вам нравится мой канал, подпишитесь на него, пожалуйста.
ссылка:https://studio.youtube.com/channel/UCaXI2PcsTlH5g0et67kdD6g
Код
- Код
Код Arduino
// www.YouTube.com/Electronics is Fun //#include#include #define LEFT A0 # define echopin A1 // echo pin # define trigpin A2 // Trigger pin #define RIGHT A3AF_DCMotor Motor1 (1, MOTOR12_1KHZ); AF_DCMotor Motor2 (2, MOTOR12_1KHZ); AF_DCMotor Motor3 (3, MOTOR34_1KHZ); AF_DCMotor Motor4 (4, MOTOR34_1KHZ); Servo myservo; int pos =0; long time; void setup () {Serial.begin (9600); myservo.attach (10); for (pos =90; pos <=180; pos + =1) {myservo.write (pos); delay (15);} for (pos =180; pos> =0; pos- =1) {myservo.write (pos); delay (15);} for (pos =0; pos <=90; pos + =1) {myservo.write (pos); delay (15);} pinMode (RIGHT, INPUT); pinMode (LEFT, INPUT); pinMode (trigpin, OUTPUT); pinMode (echopin, INPUT);} void loop () {unsigned int distance =read_cm (); int Right_Value =digitalRead (RIGHT); int Left_Value =digitalRead (LEFT); Serial.print ("R ="); Serial.print (Right_Value); Serial.print ("L =" ); Serial.print (Left_Value); Serial.print ("D ="); Serial.println (расстояние); if ((Right_Value ==1) &&(distance> =10 &&distance <=30) &&(Left_Value ==1)) {forword ();} else if ((Right_Value ==0) &&(Left_Value ==1) ) {turnRight ();} else if ((Right_Value ==1) &&(Left_Value ==0)) {turnLeft ();} else if ((Right_Value ==1) &&(Left_Value ==1)) {stop ( );} else if (distance> 5 &&distance <10) {stop ();} else if (distance <5) {backword ();} delay (50);} long read_cm () {digitalWrite (trigpin, LOW); delayMicroseconds (2); digitalWrite (триггер, ВЫСОКИЙ); delayMicroseconds (10); time =pulseIn (echopin, HIGH); return time / 29/2;} void forword () {// включаем движение вперед Motor1.setSpeed (120); Motor1.run (FORWARD); Motor2.setSpeed (120); Motor2.run (FORWARD); Motor3.setSpeed (120); Motor3.run (FORWARD); Motor4.setSpeed (120); Motor4.run (FORWARD);} void backword () {// в другую сторону Motor1.setSpeed (120); Motor1.run (BACKWARD); Motor2.setSpeed (120); Motor2.run (НАЗАД); Motor3.setSpeed (120); Motor3.run (НАЗАД); Motor4.setSpeed (120); Motor4.run (НАЗАД); } void turnRight () {// другой rightMotor1.setSpeed (200); Motor1.run (ВПЕРЕД); Motor2.setSpeed (200); Motor2.run (ВПЕРЕД); Motor3.setSpeed (100); Motor3.run (НАЗАД) ); Motor4.setSpeed (100); Motor4.run (BACKWARD);} void turnLeft () {// включаем движение leftMotor1.setSpeed (100); Motor1.run (BACKWARD); Motor2.setSpeed (100); Motor2 .run (НАЗАД); Motor3.setSpeed (200); Motor3.run (ВПЕРЕД); Motor4.setSpeed (200); Motor4.run (ВПЕРЕД);} void stop () {// stopMotor1.setSpeed (0); Motor1.run (RELEASE); Motor2.setSpeed (0); Motor2.run (RELEASE); Motor3.setSpeed (0); Motor3.run (RELEASE); Motor4.setSpeed (0); Motor4.run (RELEASE); }
Схема
Производственный процесс
- Двигатель сопротивления
- Прототип Raspoulette
- Простой робот Pi
- Атака НЛО!
- Робототехническая система для обнаружения человека с использованием Arduino Uno
- 3D RGB Arduclock
- Библиотека биполярных шаговых двигателей
- Гитарный медиатор и педаль Stomp!
- Что такое линейный двигатель?
- Что такое серводвигатель?