


Счетчик RPM на основе Arduino с новым и более быстрым алгоритмом
Компоненты и расходные материалы
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 3 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 |
Необходимые инструменты и машины
 |
| |||
 |
|
Приложения и онлайн-сервисы
 |
|
Об этом проекте
Этот проект разработан поцарапать как попытка измерить точное число оборотов в минуту (количество оборотов за Минуты) различных двигателей с использованием одного ИК-сигнала датчик, плата Arduino и обязательно ключевой ингредиент - лазерная указка (обязательно красная).
В этом проекте используется тот факт, что ИК-датчик также считывает небольшое количество ИК-излучения, испускаемого красным лазером. Однако, когда используется синий / зеленый лазер, это ИК-излучение становится намного меньше, и аналоговое считывающее напряжение падает до прибл. 0.
Когда лопасть вентилятора, прикрепленная к двигателю, попадает на путь лазерного луча, она блокирует путь, и показание падает до 0. Лопасть вентилятора продолжает вращаться, и ее положение продолжает меняться при постоянной подаче энергии. Происходит постоянная смена пути. Когда путь снова становится свободным, луч лазерной указки снова попадает на датчик.
НОВЫЙ КОД, ОСНОВАННЫЙ НА АЛГОРИТМЕ ОДНОЙ СЪЕМКИ, ДЛЯ БЫСТРЫХ И БОЛЬШЕ ИЗМЕРЕНИЙ АДАПТИВНЫХ ИЗМЕРЕНИЙ:-
Код для этого проекта, который я разработал, использует недавно разработанный алгоритм для этого проекта. Алгоритм действительно уникален и рассчитан на выполнение измерений менее чем за 40 миллисекунд и получение точных результатов. Одна очень важная особенность этой программы заключается в том, что она использует метод, который я называю Обнаружение одиночного выстрела для Arduino. Он вычисляет частоту вращения двигателя каждый раз, когда лопасть вентилятора создает препятствие на пути лазерного луча. Это связано с тем, что препятствие на пути лазерного луча отмечает 1 / n полный оборот для n лопастей в вентиляторе. Итак, программа очень чувствительный в даже минутные изменения скорости вращения ( до двух десятичных знаков) в каждые 1 / н th революция из поклонник лезвие снова где нет есть число из лезвия из вентилятор. Следовательно, этот уникальный алгоритм обнаружения одиночного выстрела обеспечивает чрезвычайно точный значение из Число оборотов в минуту и более высокая чувствительность к изменениям в измерениях .
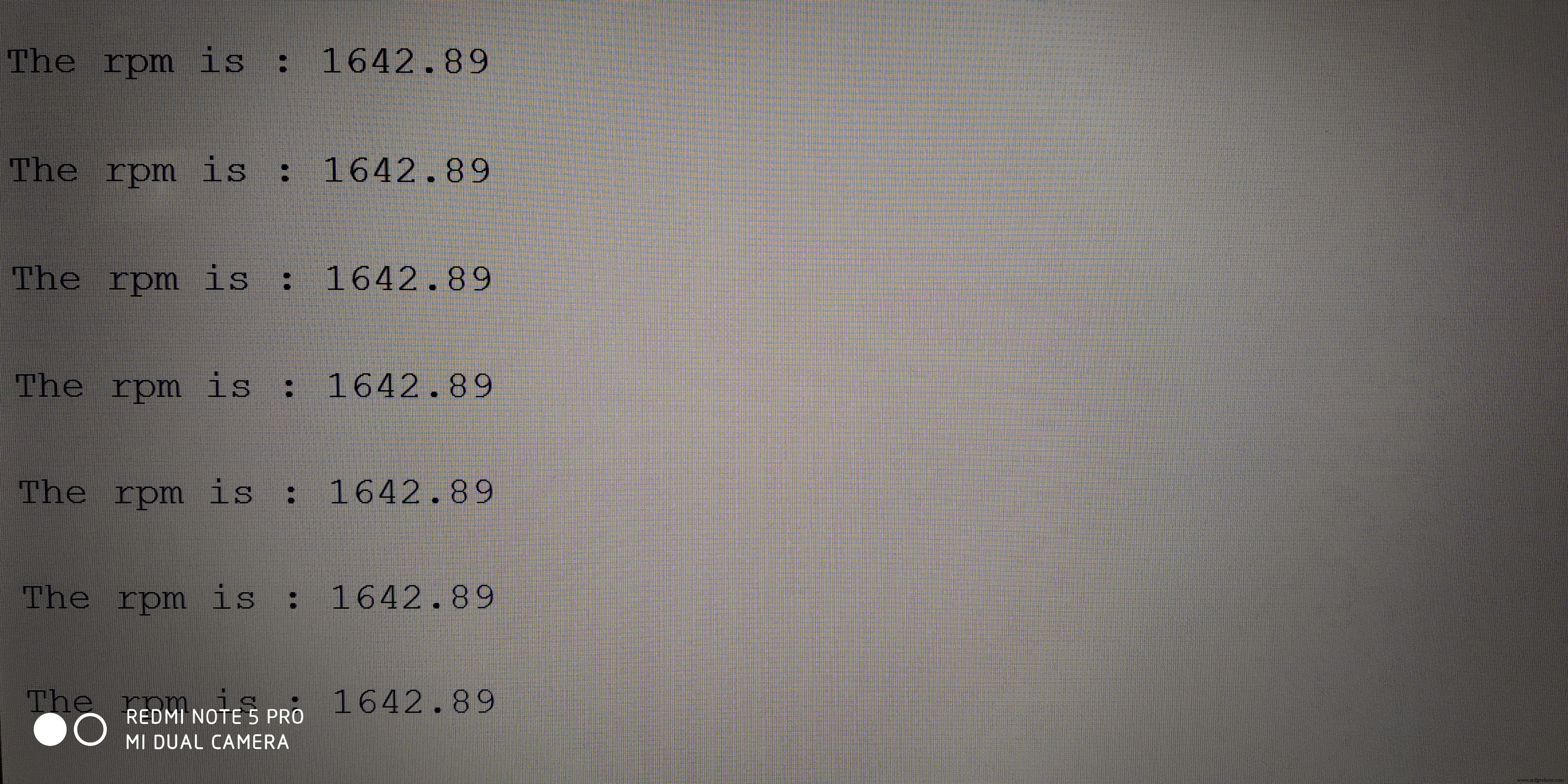
В выше отображается изображение из вывод образец от серийный монитор в а тест запустить, оценка из вывод проверка можно ясно быть видели который есть о 2 раз а секунда RPM значения являются рассчитано до два места из десятичные дроби каждый время .
Каждый, кто его просматривает, должен хотя бы раз попробовать этот проект и поделиться своими ценными отзывами. Расскажите о своих экспериментах и их результатах, связанных с этим алгоритмом. Предложения по новым проектам приветствуются в разделе комментариев. Если вам нравится проект, уважайте его.
Подпишитесь на мой профиль, нажав на эту ссылку (https://create.arduino.cc/projecthub/YASH36) @ YASH36 для некоторых новых обновлений проекта.
А пока оставайтесь в безопасности и наслаждайтесь Arduino !!
Код
- RPM_counter_101
RPM_counter_101 Arduino
Это код счетчика оборотов. // код YaSh.int sen =A0; const float wid =0.012; // отрегулируйте ширину лопасти вентилятора в соответствии с вашими потребностями. const float rad =0.045; // настраиваем радиус точки обнаружения в лопасти вентилятора.const float konst =6.2832; // 2 * pi.float time_1; float time_2; float vel; float diff; float tnet; float rpm; void setup () {Serial.begin (9600); pinMode (сен, ВХОД); Serial.print ("\ n, пожалуйста, запустите двигатель как минимум за 3 секунды до этого. \ N"); задержка (3000);} void loop () {if (analogRead (sen) <950) {time_1 =millis (); задержка (30); } если (analogRead (sen)> 950) {время_2 =миллис (); diff =(время_2-время_1); vel =wid / diff; // скорость вращения tnet =(konst * rad) / vel; // время =(2 * пи * радиус) / скорость. об / мин =(60000) / тнет; // время в миллисекундах в минуты, а затем в шаг преобразования оборотов в минуту. } Serial.print ("\ n Скорость вращения:"); Serial.println (об / мин);} Схема
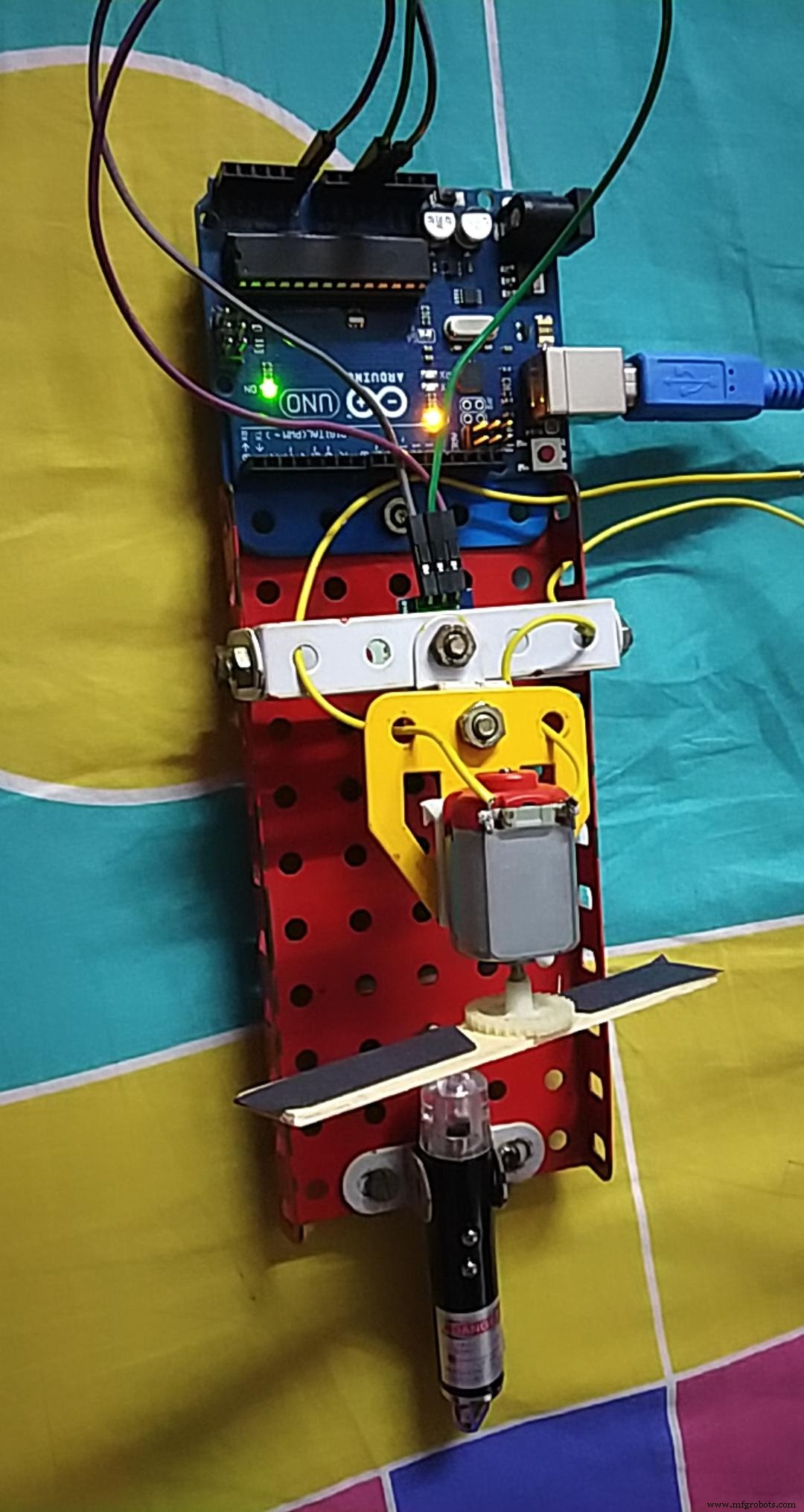
это изображение для размещения базы и других компонентов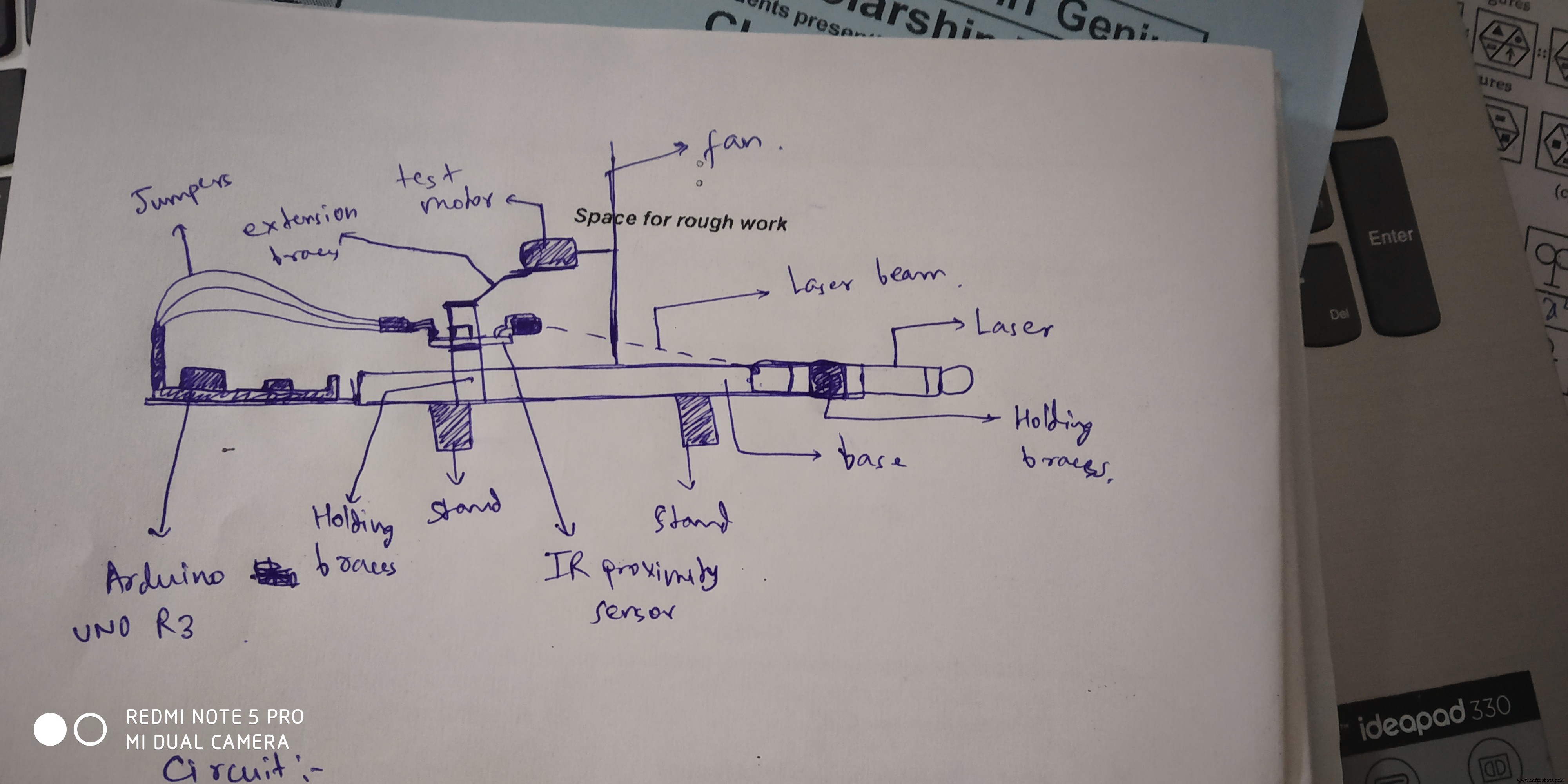 схема подключения датчика к плате Arduino
схема подключения датчика к плате Arduino 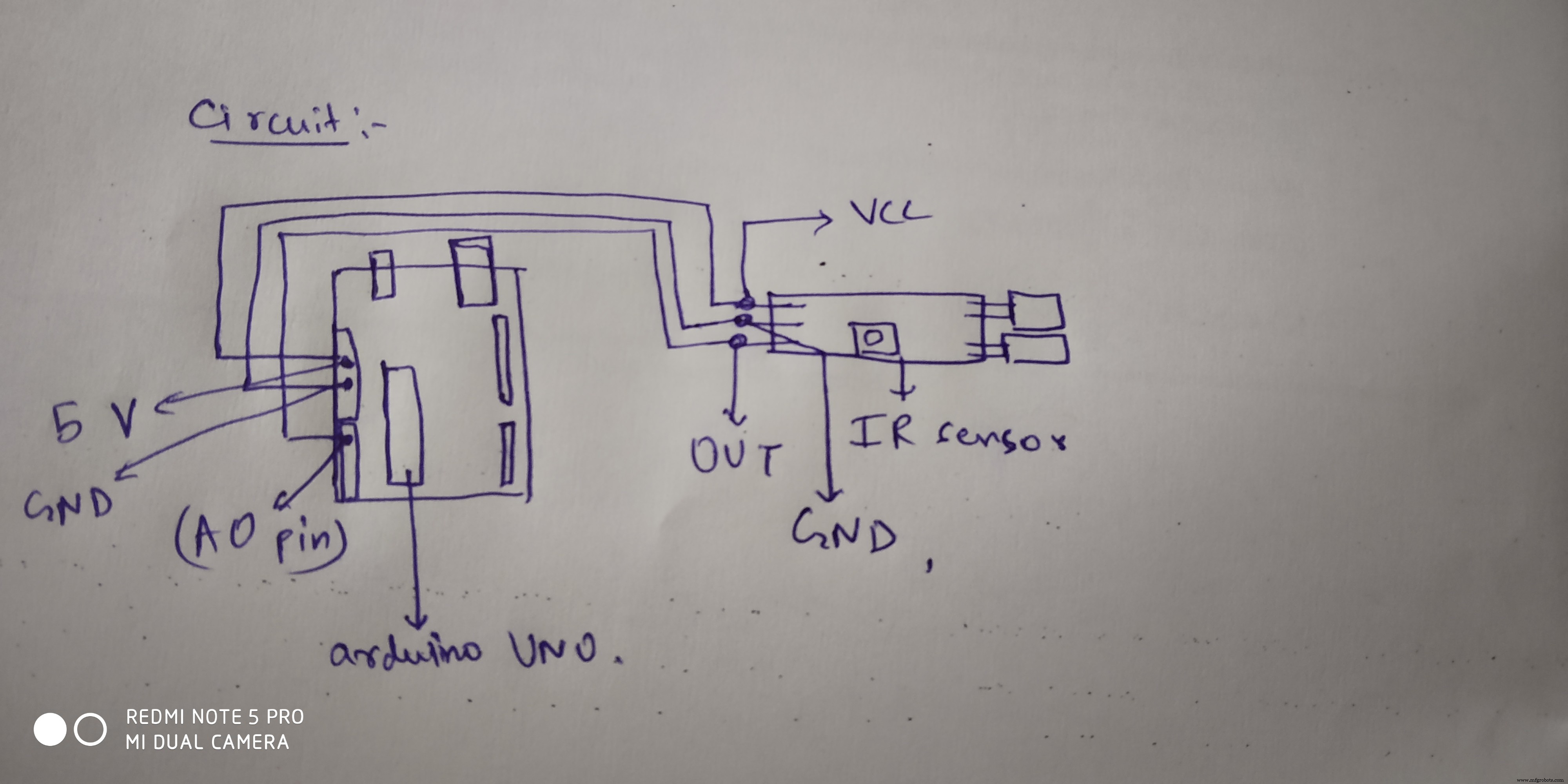
Производственный процесс
- Аэропоника с Raspberry Pi и датчиком влажности
- Датчик Portenta и термопары (с MAX6675)
- Игра с гироскопом Arduino с MPU-6050
- Датчик DHT11 со светодиодами и пьезо-динамиком
- Мониторинг CO2 с помощью датчика K30
- Unopad - MIDI-контроллер Arduino с Ableton
- Регистратор данных температуры и влажности
- IOT - Smart Jar с использованием ESP8266, Arduino и ультразвукового датчика
- Простой датчик препятствий с Arduino
- Клеточные автоматы на основе Arduino и OLED