


Валби, двуногий ходячий
Компоненты и расходные материалы
 |
| × | 1 | |||
| × | 10 | ||||
| × | 1 |
Необходимые инструменты и машины
 |
|
Приложения и онлайн-сервисы
 |
|
Об этом проекте
Разве не было бы замечательно, если бы мы могли сделать двуногого робота с несколькими сервоприводами? Внутренний выродок так думал, и вот результат…
Это Walbi, WALink BIped, робот, который мы создали для проекта машинного обучения, который так и не сдвинулся с мертвой точки (как и Walbi, но это потому, что он обеими ногами твердо стоит на земле).
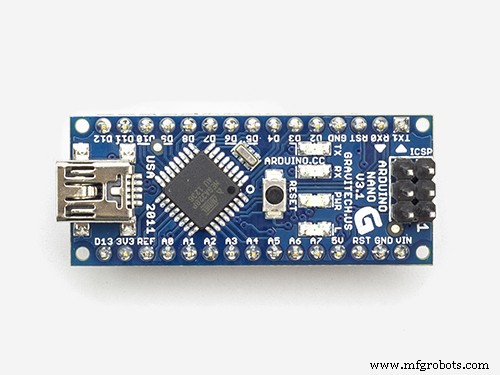
Walbi использует Arduino Nano для «мозга», сервоприводы LX-16A для «мышц» и пластиковые детали, напечатанные на 3D-принтере, для «костей». Сервоприводы LewanSoul LX-16A - это сервоприводы-мечты для небольших (иш) роботизированных проектов, поскольку они легкие, могут перемещаться более 19 кг / см и соединены одним кабелем, идущим от сервопривода к сервоприводу, что делает подключение робота детским. играть.
Уолби - гуманоид в масштабе 2:1, его ноги имеют высоту 55 см (21,7 дюйма) от пятки до талии и вес 1,1 кг (2,4 фунта). Белые части его корпуса были напечатаны на 3D-принтере, но с таким же успехом могли быть изготовлены из легкого и прочного дерева.
Программировать Walbi очень просто. Вы можете скачать ниже две программы, необходимые для захвата и воспроизведения движения, и с их помощью вы можете заставить Уолби ходить, ползать, карабкаться, прыгать или танцевать! Вам нужно только переместить его ноги в желаемую позу, записать эту позу, преобразовать его в другую позу, записать и так далее, а затем, когда вы записали полную последовательность, вы можете откинуться назад и посмотреть, как он умело выполняет движется, чему вы его научили.
Может быть, ты научишь свой танцевать риверданс 😀
Создание Walbi
Walbi был напечатан на 3D-принтере из PLA-пластика на принтере FlashForge Creator Pro. Вы можете загрузить файлы STL с Thingiverse или использовать альтернативный метод для создания ступней, «костей» ног и талии с использованием дерева или металла. Сервоприводы крепятся к этим частям, к сервоприводам и друг к другу.
Вам потребуются металлические опоры четырех различных типов, доступных для крепления сервоприводов к напечатанным деталям и друг к другу (дополнительная информация и фотографии доступны в блоге Release The Inner Gook).
Электропроводка
Для управления сервоприводами LX-16A вам понадобится отладочная плата LewanSoul.
Он будет получать команды от последовательного порта на Arduino Nano. Поскольку мы использовали аппаратный последовательный порт Arduino для связи с компьютером, мы использовали библиотеку SoftwareSerial для создания второго последовательного порта на Nano, чтобы подключиться к отладочной плате.
Количество проводов сведено к минимуму с помощью серийных сервоприводов. Есть кабель от каждого сервопривода к следующему (последовательный кабель, поставляемый с сервоприводами), а сервоприводы на поясном штекере прямо к отладочной плате. Ваш компьютер подключается к USB-порту Arduino, а Arduino подключается к отладочной плате с помощью трех перемычек (TX, RX и GND), подключенных к контактам Arduino, которые вы настраиваете для SoftwareSerial - мы использовали контакты 10 и 1 в коде1. .
Сервоприводы используют скорость передачи 115200 бод (если вы знаете, как ее изменить, сообщите нам, так как она слишком высока). Эта скорость передачи данных высока для SoftwareSerial, поэтому нам пришлось реализовать функции проверки ошибок и повторного запуска. В некоторых случаях требовалось настойчивость, чтобы получить правильные показания.
Мощность
Сервоприводы могут обеспечить 19,5 кг / см при напряжении 7,4 В. Мы использовали напряжение 6 В, а ток в паузе был ниже трех ампер.
Программирование
Вы можете получить код Arduino в репозитории проекта на Github.
Две программы используются для захвата и воспроизведения движения, техники, аналогичной той, что используется в фильмах. Вы начинаете с того, что придаете роботу позу. Поскольку сервоприводы по умолчанию выключены, вы можете вращать сервоприводы вручную. Когда робот находится в желаемой позе, вы используете программу Walbi_record для считывания и отображения всех углов сервопривода. Затем вы вводите эти значения угла в переменную PoseAngles в Walbi_play и используете программу для воспроизведения последовательности записанных поз со скоростью, установленной с помощью переменной timeToMove (в миллисекундах).
Надеемся, вам понравился проект. Не стесняйтесь поделиться своей любовью, оставив комментарий, подписавшись на блог или оставив отзыв любым другим способом. Мы ценим это!
Внутренние самородки компьютерщиков
Вот несколько советов и приемов, извлеченных при создании Walbi:
- Опоры для LX-16A прикрепляются к сервоприводу только в ОДНОМ положении, поэтому их очень легко подключить неправильно, особенно к деталям, напечатанным на 3D-принтере. Нам пришлось пару раз собрать Walbi заново, чтобы исправить ошибки сборки, которые было довольно трудно обнаружить.
- По умолчанию сервоприводы имеют ID 1. Назначьте каждому сервоприводу другой идентификатор перед установкой их на роботе, иначе будет невозможно взаимодействовать с несколькими подключенными последовательными сервоприводами с одним и тем же идентификатором.
- Использование кабельных стяжек действительно улучшает внешний вид.
- Сервоприводы поставляются с винтами, необходимыми для соединения рупоров с сервоприводами и рупоров с опорами. К опорам прилагаются винты, необходимые для их крепления к сервоприводам. Вам нужно будет отдельно приобрести винты для поддержки соединений и поддержки соединения пластиковых деталей. Мы использовали винты и гайки DIN912 M2-6 и M2-10.
- Чтобы улучшить сцепление с дорогой, приклейте силиконовые прокладки к подошвам ног робота.
- Желательно использовать металлические рожки сервоприводов, так как пластиковые рожки, поставляемые с сервоприводами, порвутся, если (когда) ноги столкнутся друг с другом во время испытаний. Если рожки порвутся, робот будет провисать, и воспроизведение движения потеряет точность (что в противном случае на удивление хорошо).
Код
Программы Arduino для управления движением и воспроизведения
https://github.com/ptavaressilva/WalbiИзготовленные на заказ детали и корпуса
STL для 3D-печатных деталей
Первоначально напечатано в файле Flash Forge Creator ProCAD на сайте thingiverse.comПроизводственный процесс