


Учебное пособие по серводвигателям для начинающих — Electronicslovers.com
Серводвигатели также широко используются в робототехнике. Как и в случае с ПРОМЫШЛЕННОСТЬЮ, в настоящее время сервопривод является сердцем проектов РОБОТОТЕХНИКИ, таких как роботизированная рука, радиоуправляемые автомобили, радарная тарелка, конвейерные ленты, позиционирование антенны, автофокусировка камеры, процесс печати и т. д.
Во многих хобби-проектах широко используются серводвигатели. Я надеюсь, что эта статья предоставит вам краткую информацию о том, что такое сервопривод, основной принцип работы серводвигателя, различные разновидности сервоприводов, основное сравнение серводвигателя и обычного двигателя постоянного тока.

Определение серводвигателя:
“ Это устройство, которое обеспечивает движение в ответ на команду и регулирует движение в ответ на отрицательную обратную связь. «
Главной особенностью сервопривода является точное управление положением его вала. По сути, это система с замкнутым контуром (т. е. с отрицательной обратной связью).
Замкнутая система сервопривода состоит из четырех основных частей:
- двигатель постоянного тока.
- Контур управления.
- Шестерни.
- Датчик обратной связи по положению.
Основной частью серводвигателя является небольшой двигатель постоянного тока. Эти двигатели постоянного тока имеют высокую скорость (т. е. высокую скорость вращения) и очень низкий крутящий момент (т. е. крутящее усилие, ответственное за выполнение работы). В основном, небольшие двигатели постоянного тока имеют очень высокую скорость, но не имеют намного более высокого крутящего момента (т. Е. Небольшая сила и большее расстояние). Но конструкция зубчатых колес внутри сервопривода преобразует эту высокую скорость и низкий крутящий момент двигателя постоянного тока в более медленную скорость и более высокий крутящий момент (т. Е. Малое расстояние, большая сила).
Многие двигатели постоянного тока быстрее развивают скорость около 5000 об/мин, но шестерни снижают это очень высокое число оборотов примерно до 60 об/мин и высокий крутящий момент. У недорогих сервоприводов шестерни сделаны из пластика, чтобы уменьшить вес и снизить стоимость, в то время как сервоприводы, предназначенные для более тяжелой работы (т. Е. Очень высокий крутящий момент), имеют шестерни из металла, например, сервоприводы, используемые в промышленности. .
Когда питание подается на сервопривод впервые через входную линию, двигатель постоянного тока вращается с очень высокими оборотами и очень малым крутящим моментом, но из-за шестерен вал сервопривода замедляется.
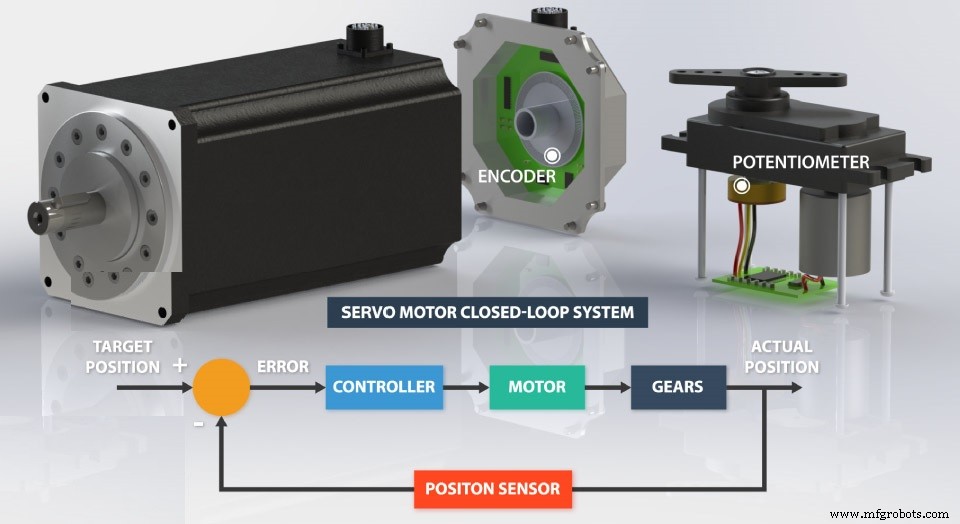 Поскольку датчик обратной связи по положению подключен по схеме отрицательной обратной связи, чтобы точно контролировать положение сервопривода, желаемое положение. В промышленных сервоприводах датчик обратной связи по положению представляет собой высокоточный энкодер, но в любительских сервоприводах датчик положения представляет собой потенциометр. Датчик положения (т. е. потенциометр) на конечной передаче подключен к цепи, которая содержит детектор ошибок (т. е. этот детектор ошибок в основном представляет собой компаратор, который сравнивает два сигнала, один из которых поступает со входной линии, также называемой целевой позицией, а другой — с выходного сигнала. через потенциометр, также называемый фактическим положением) и микросхему контроллера, встроенную в плату.
Поскольку датчик обратной связи по положению подключен по схеме отрицательной обратной связи, чтобы точно контролировать положение сервопривода, желаемое положение. В промышленных сервоприводах датчик обратной связи по положению представляет собой высокоточный энкодер, но в любительских сервоприводах датчик положения представляет собой потенциометр. Датчик положения (т. е. потенциометр) на конечной передаче подключен к цепи, которая содержит детектор ошибок (т. е. этот детектор ошибок в основном представляет собой компаратор, который сравнивает два сигнала, один из которых поступает со входной линии, также называемой целевой позицией, а другой — с выходного сигнала. через потенциометр, также называемый фактическим положением) и микросхему контроллера, встроенную в плату.
За счет вращения шестерен вращается ручка потенциометра, в результате чего вырабатываются напряжения, которые подключены к детектору ошибок. Теперь ошибка возникает из-за сравнения двух сигналов компаратором, который подключен к микросхеме контроллера (т.е. этот контроллер представляет собой встроенный в микросхему H-мост). После сравнения выдается ошибка, которая позволяет контроллеру принять решение о вращении вала в любом направлении для достижения целевого положения. 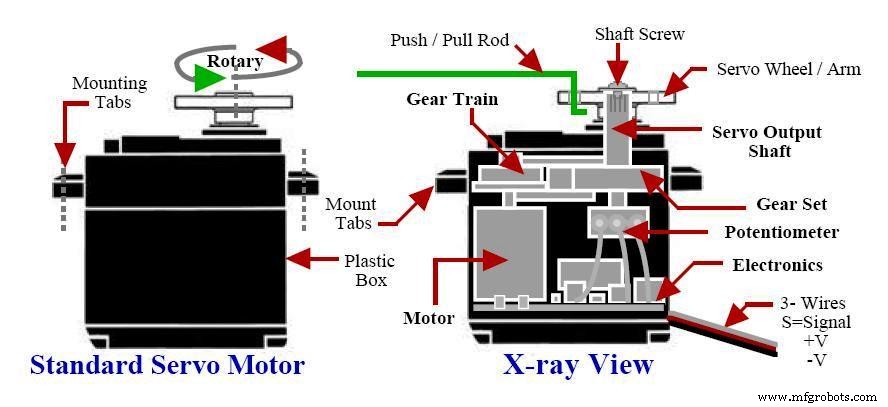
Типы СЕРВО:
Сервоприводы доступны в различных вариантах.
- ПОЗИЦИОНАЛЬНЫЙ ВРАЩАЮЩИЙСЯ СЕРВО:
Выходной вал будет вращаться только на 180 градусов. Дополнительные упоры расположены для ограничения дальнейшего вращения вала за пределами его диапазона (например, для РОБОТИЧЕСКИХ рук, рулей направления и т. д.)
- ПОСТОЯННОЕ ВРАЩЕНИЕ СЕРВО:
Он похож на сервопривод позиционного вращения, но может непрерывно вращаться на 360 градусов. Команды, отправленные сервоприводу, заставят его вращаться либо по часовой стрелке, либо против часовой стрелки с различной скоростью (например, антенна RADAR и т. д.).
- ЛИНЕЙНЫЙ СЕРВО:
Движение этого сервопривода осуществляется вперед и назад, а не по кругу (например, для станков с ЧПУ, 3D-принтеров и т. д.).
БАЗОВОЕ СРАВНЕНИЕ СЕРВОПРОВОДА И ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА:
Серводвигатели могут вращаться на 180 градусов вперед и назад, а двигатели постоянного тока могут вращаться на 360 градусов, пока подается питание. В настоящее время сервопривод также доступен в режиме непрерывного вращения, который может вращаться на 360 градусов, но из-за конструкции редуктора скорость сервопривода меньше по сравнению с двигателем постоянного тока. Двигатели постоянного тока — лучший выбор для свободно работающих роботов, тогда как, когда нам нужна точность (например, РУКОЯТКА РОБОТА, стеклоочистители, рули лодки и т. д.), лучшим выбором будет сервопривод.
Скорость двигателя постоянного тока регулируется методом ШИМ (широтно-импульсной модуляции) (т. е., изменяя рабочий цикл, мы можем контролировать скорость двигателя постоянного тока). Например, рабочий цикл больше 50 % означает, что скорость выше, а рабочий цикл меньше 50 % означает, что скорость ниже.
Принимая во внимание, что метод ШИМ в серводвигателе определяет положение его вала, а не скорость. Как только команда будет отправлена на сервопривод, он точно установит положение вала в желаемое положение. Таким образом, это автоматическое регулируемое поведение его вала делает сервопривод идеальным выбором для применения в РОБОТОТЕХНИКЕ.
Промышленные технологии
- Renesas расширяет возможности микроконтроллера для сервоуправления в промышленных роботах
- Сборка роботов Raspberry Pi:лучшее руководство для начинающих
- Простой робот Pi
- Язык программирования C PDF:учебник по основам для начинающих
- Эксперты по ремонту серводвигателей Fanuc
- Советы по ремонту серводвигателя и устранению неисправностей
- Для какого лазерного резака подходит серводвигатель?
- Кабели двигателя для приводов с регулируемой скоростью
- Обзор для начинающих:что такое металлообработка?
- Красота планетарной коробки передач для серводвигателя