


Как технологии изменили производство роботов
Введение. Предупреждение:вы можете почувствовать себя СТАРЫМ
Меня зовут Стив Спано. Моим первым электронным проектом было соединение батареи, двух проводов и лампочки фонарика, когда мне было 4 года. В возрасте от 6 до 16 лет я изучал различные языки программирования (ассемблер, базовый и даже C) на таких компьютерах, как Texas Instruments TI-994A, Commodore C64, Amiga 2000 и IBM 386. Я также создал несколько Heathkit. электронные проекты, такие как комплект радиоприемника «Solid State». Кто из вас хотя бы слышал о Хитките?

Я очень хотел робота Heathkit HERO 1, он был удивительно сложным, с ультразвуковым обнаружением объектов, подвижной рукой и 8-битным центральным процессором. Он даже поставлялся с дистанционной радиоклавиатурой, чтобы вы могли программировать его непосредственно на шестнадцатеричном ассемблере! Могли бы вы представить? Программировать напрямую в шестнадцатеричном формате с помощью клавиатуры и вообще без отладчика? Ужас! Удивительно, но этот маленький робот до сих пор продается на Ebay за 1500 долларов США. Я должен купить один — я всегда хотел его — и это так мило!

В течение многих лет, до Интернета, если вы можете себе представить такое время, я даже запускал службу «BBS» на модеме со скоростью 9600 бод под названием «Inter-Dimension», где мы обменивались сообщениями и программным обеспечением Commodore/Amiga. В то время моей компьютерной мечтой было накопить 2000 долларов (фантастическая сумма денег в 1995 году для 16-летнего подростка), чтобы купить 10-мегабайтный жесткий диск для моей Amiga 2000. Если бы у меня был такой жесткий диск, У меня был бы лучший модем на основе BBS!
Я вырос в Скрэнтоне, штат Пенсильвания (США), окончил школу электротехники (Университет Скрэнтона) и получил степень магистра в области ЭЭ со специализацией в области систем управления в Государственном университете Нью-Йорка. Моей первой работой по ЭЭ после школы было проектирование оборудования для термопринтеров, используемых в кассовых аппаратах и в розничной торговле. Основным проектом на моей первой работе в области EE в 1998 году было помочь обновить продукты компании с их 8-разрядного процессора Intel на новый 32-разрядный процессор с частотой 50 МГц и 16-разрядной шиной памяти. Это был большой проект, в котором участвовали команды разработчиков программного обеспечения, оборудования и машиностроения. Моей второй работой в сфере EE была работа в компании, разрабатывавшей сетевые системы хранения данных. Это было в 2001 году, и большой проект для этой компании состоял в том, чтобы помочь разработать серию систем SAN, поддерживающих совершенно новый интерфейс Fibre Channel 2 Гбит/с. Это было очень быстро, 2 Гбит/с по оптоволокну в 2001 году! Как технологии могут быть лучше, чем это??
Старший проект, 1997 г.
Я узнал о странице ElectronicsLovers в Instagram, и администраторы искали статьи «Senior Project», чтобы выделить их на своей странице. Дата не была указана, поэтому я решил отправить свою курсовую работу в колледже за 1997 год, главным образом в качестве забавного напоминания о том, как изменились технологии.
Когда в 1997 году я заканчивал BSEE в Скрэнтонском университете, нашим выпускным проектом была разработка автономного робота, способного перемещаться по лабиринту. Я сразу подумал о Heathkit HERO1; теперь я мог бы попытаться построить одного в школе и гораздо более продвинутого робота. В конце концов, Heathkit HERO1 был основан всего лишь на 8-разрядном процессоре Motorola 6808 с 4 КБ оперативной памяти (врезка:типичные сегодняшние сетевые карты PCI-Express 1G имеют буфер от 64 КБ до 256 КБ только для пакетных данных).
В архитектуре моего робота использовался гораздо более продвинутый процессор Intel 87x196KC. Это был 16-разрядный ЦП, который обеспечивал 32 КБ внутренней памяти EEPROM для хранения программ, но общий объем оперативной памяти составлял всего 512 байт. Компилятор «C» генерировал очень неоптимизированный код, что делало управление стеком на 512 байт серьезной проблемой, а отладчик JTAG реального времени или какой-либо другой тип отладчика вообще отсутствовал. Однако у ЦП был внутренний последовательный порт/UART, который можно было использовать для записи простых символов, чтобы определить, что делает код. Стандартные вызовы функций «C» для printf/sprintf даже не поддерживались на ЦП, потому что память RAM была слишком мала.
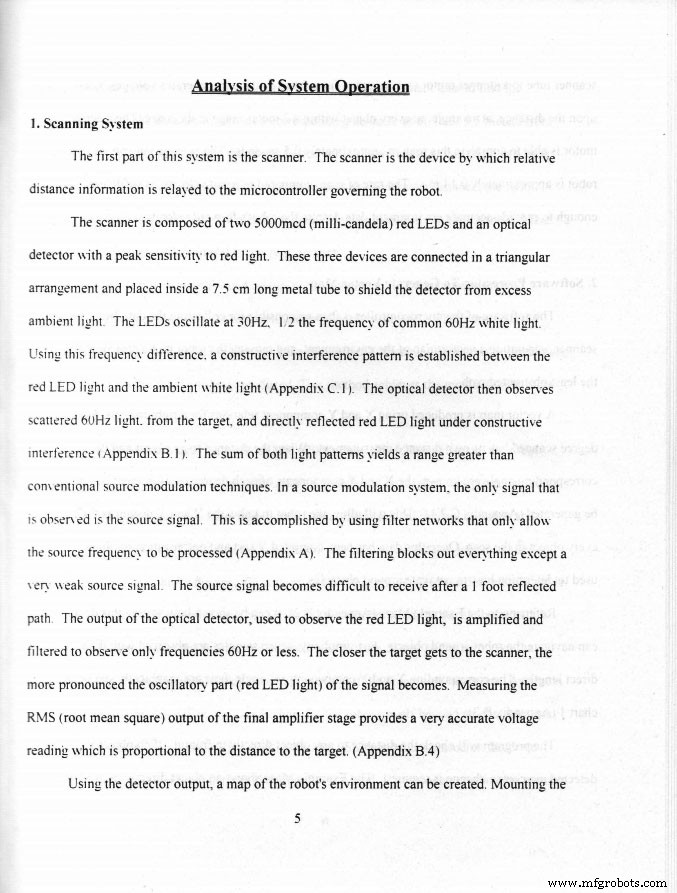
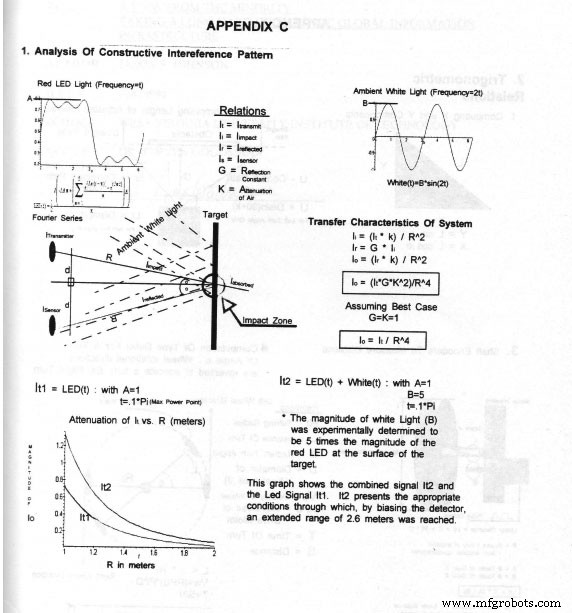
При разработке робота использовались различные схемы, такие как драйверы FET для управления двигателем, чтобы позволить ЦП управлять серией двигателей 12 В постоянного тока, чтобы робот мог перемещаться по комнате. Грубая система «Лидар» была построена с использованием лазерного светодиода, зеркала и детектора. Это позволило отобразить простой «1-битный» вид комнаты перед роботом. Я также использую термин «образ» очень вольно. Простая карта «вкл/выкл» для препятствий создавалась примерно в 32 байтах памяти. Затем код процессора пытался определить, двигался ли робот к пропасти или стене в лабиринте, через который он пытался пройти. Во время соревнований робот смог успешно пройти лабиринт. Я даже написал статью о конструкции робота, и она заняла 2-е место на конкурсе студенческих работ IEEE в 1997 году в Университете Джорджа Вашингтона. Робот сработал, и мне дали диплом инженера-электрика.
Проекты старшеклассников 2018 года
Недавно я работал в Скрэнтонском университете в качестве отраслевого консультанта, чтобы помочь предложить идеи для курсов, основанных на том, что может понадобиться отрасли, и какие навыки/технологии актуальны для решения сегодняшних инженерных задач. Я спросил одного из своих профессоров о проектах роботов и о том, чем сейчас занимаются студенты.Скрэнтонский университет по-прежнему ежегодно проводит конкурс роботов для студентов-инженеров, но теперь это региональный и национальный конкурс. Роботы, которых проектируют студенты, в сотни раз сложнее. Текущие роботы используют процессоры Arm9/Arm11, такие как Raspberry PI. Студенты пишут код «C», который работает в Linux для прямого взаимодействия с камерами USB-HD, что позволяет реально воображать роботов. Сочетая Linux, Raspberry PI и множество проектов с открытым исходным кодом, доступных через GIT и Google, учащиеся получают доступ к алгоритмам обнаружения и распознавания изображений. При разработке современных проектов роботов учащиеся могут загружать алгоритмы с открытым исходным кодом, отлаживать их с помощью удаленных мониторов Ethernet, что позволяет им видеть каждую переменную и выполнять пошаговый код для отладки. Затем учащиеся тратят больше времени на разработку очень умных алгоритмов навигации, чтобы попытаться дать своему роботу преимущество во время соревнований.
Услышав это, я сразу же ответил:«Как несправедливо!». В мое время нам приходилось хранить все изображение в 32 байтах и вручную кодировать диспетчер стека, чтобы наш код мог работать даже на всего лишь 512 байтах оперативной памяти, которую нам предоставили. Конечно, Raspberry PI — это даже не «пик» сегодняшних технологий, но он на световые годы превосходит все, что было доступно в 1997 году. Мало того, что аппаратное обеспечение более сложное, но и среды отладки и разработки позволяют учащимся сосредоточиться на проектировании. вместо того, чтобы бороться с проблемами памяти. Однако некоторые вещи остаются прежними. Робот все еще должен двигаться. Хотя учащиеся имеют доступ к некоторым процессорам более высокого класса, им все равно необходимо подключить порт 3,3 В к процессу для включения/выключения двигателя 12 В постоянного тока. Это возвращает учащихся к проектированию схем для транзисторов и полевых транзисторов, они узнают, как работают эти основные компоненты, и позволяют своим роботам двигаться.
Я улыбнулся и сказал, что основы все еще применимы, и студенты это признают. Сложная электроника по-прежнему опирается на фундаментальную работу одиночных транзисторов; возможно, один снаружи ЦП включает двигатель, или 5 триллионов из них внутри ЦП для обработки изображения и навигационного кода.
http://news.scranton.edu/articles/2017/ 03/FIRST-Robot-Comp-2017.shtml
Что дальше?
Моя третья «работа», которая у меня есть и по сей день, — это управление собственным консалтинговым бизнесом в области электроники и программного обеспечения. Я начал консалтинговый бизнес в 2001 году, и он определенно был полон работы и неожиданной активности. Я непосредственно нанял более дюжины человек, и мы работали над аппаратными и программными проектами, начиная от дизайна блока питания, драйвера принтера, обработки изображений, сетевых устройств, жестких дисков и криптографии. Лично я планирую больше сосредоточиться на своем любимом технологический элемент — Xilinx FPGA.
Современные устройства FPGA, такие как серия Kintex/Atrix, объединяют лучшие стороны разработки аппаратного и программного обеспечения; реконфигурируемое оборудование, реконфигурируемое программное обеспечение и одновременная отладка. Один конкретный проект, над которым я тогда работал, касается масс-спектрометра. В этом конкретном дизайне было много ограничений по скорости и сбору данных. Одна часть исправления заключалась в том, чтобы «просто добавить еще одно ядро процессора». Почти как по волшебству, одноядерное устройство из-за двухъядерного устройства, позволяющего разделить служебные задачи и критичные по времени функции. В 1997 году трудно было представить себе возможность реконфигурации физического устройства, такого как FPGA, с дополнительными процессорными ядрами. Современные устройства FPGA позволяют делать это постоянно.
Я планирую вернуться в Скрэнтонский университет позже в этом году, чтобы поговорить с некоторыми студентами о текущих проектах ПЛИС. Я буду уделять им больше внимания в своей работе; возможно, в будущем я смогу наставлять новых инженеров, когда они приступят к первой работе в своей новой карьере. P.S. «Оценка» — 20 лет. Я должен был просмотреть это снова. Я инженер, а не английский майор.
Приложение A. Выдержки из My Robot Paper или
«Как изменились времена»
Эта статья была написана г-ном Спано, он является частью нашей команды. Пожалуйста, нажмите здесь, если хотите прочитать его биографию.
Промышленные технологии
- Как был открыт ванадий?
- Как защитить облачные технологии?
- Как создать платформу для роботов Arduino + Raspberry Pi
- Как современные технологии изменили методы вырезания пасхальных яиц?
- «Художественный» робот в NPE
- 9 законов технологий, изменивших мир
- Как станки с ЧПУ изменили производство
- Как поставщики логистических услуг должны инвестировать в технологии
- Как фрезерный станок с ЧПУ изменил нашу жизнь?
- Майкл Логгинс