


Разница между WCS и ориентацией инструмента в Fusion 360
Нам часто задают вопрос о Fusion 360:«В чем разница между созданием новой рабочей системы координат и определением ориентации инструмента для перемещения по позиционной оси?». Я разделю этот блог на две половины. В первой части мы рассмотрим рабочие системы координат или WCS для поклонников Fusion 360.
Система рабочих координат
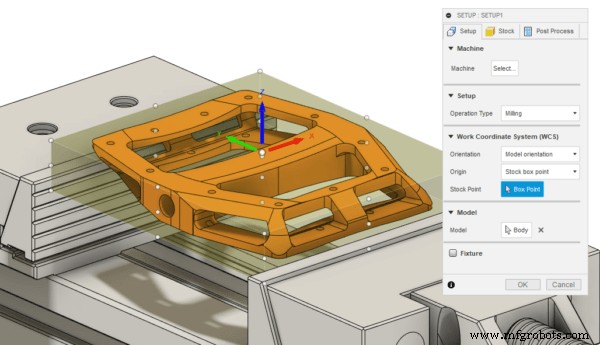
Рабочая система координат — это то, что вы должны определить в своей настройке. Это ОБЯЗАТЕЛЬНО совпадать с точкой отсчета на станке, например, G54, G55 и т. д.
Если рабочая система координат и ваш G54 на вашем станке не совпадают, когда вы выводите свои траектории на станок, станок будет ссылаться на ваши стратегии в другой системе координат. Это означает, что ваши траектории будут смещены на расстояние, разделяющее ваш G54 и ваш WCS. Многие люди склонны ориентироваться либо на центр кадра, либо на угол. Это сделает этот процесс более простым и интуитивно понятным.
Ориентация инструмента
Давайте теперь посмотрим на функциональность ориентации инструмента. Как вы, возможно, знаете, это можно найти во многих траекториях инструмента в Fusion 360. Первое, о чем следует знать, это то, что эта функция будет работать, только если на вашем станке есть 5-осевая функция. Звучит банально, но на всякий случай стоило упомянуть!
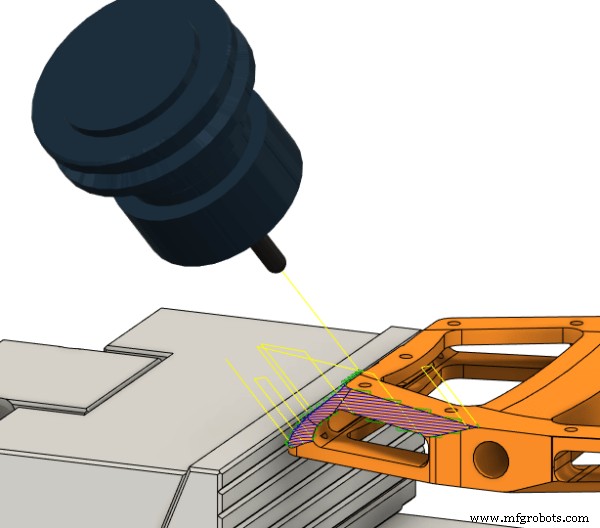
После включения ориентации инструмента вы можете сориентировать свой инструмент, чтобы вы могли обрабатывать свой компонент или элемент под углом, который отличается от ориентации по трем осям.
Параметры ориентации инструмента
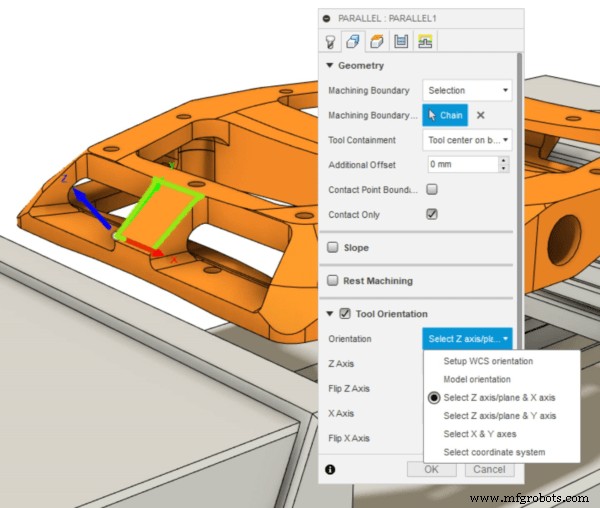
Эта функция позволяет выбирать ориентацию несколькими способами.
- Настройка WCS:
Ваш инструмент выровняется по оси рабочей системы координат, связанной с активной настройкой. - Ориентация модели:
Ваш инструмент выровняется по оси рабочей системы координат, связанной с активной моделью. - Выберите ось/плоскость Z и ось X:
Это позволяет вам самостоятельно выбирать оси Z и X, используя геометрию модели. - Выберите ось/плоскость Z и ось Y:
Это позволяет вам самостоятельно выбирать оси Z и Y, используя геометрию модели. - Выберите оси X и Y:
Это позволяет вам самостоятельно выбирать оси X и Y, используя геометрию модели. - Выберите систему координат:
Это позволяет привести инструмент в соответствие с пользовательской системой координат в модели. Этот параметр удобен, если ваша деталь не имеет точек или плоскостей, которые легко указать.
У каждого есть свои преимущества. Однако мне нравится гибкость выбора оси Z, X или Y, так как я могу использовать нарисованный каркас из эскиза или геометрию модели, например края моей детали, для выравнивания осей.
Заключение
Гибкость, предлагаемая этой функциональностью, является большим преимуществом. Возможность легко выбирать ориентацию на основе траектории инструмента может сэкономить вам много времени, поскольку вам не нужно будет вручную ориентировать компонент на станке.
Я надеюсь, что этот пост помог вам прояснить разницу между функциональностью системы рабочих координат и ориентации инструмента. Лучший способ запомнить, что это такое, заключается в следующем:рабочая система координат не меняется для данной настройки, в то время как вы можете использовать функцию ориентации инструмента всякий раз, когда вам нужен другой угол для обработки поверхности или элемента.
Вы новичок в Fusion 360? Если вы хотите попробовать его, вы можете загрузить бесплатную пробную версию по этой ссылке .
Промышленные технологии
- Python 2 против Python 3:в чем разница между Python 2.x и Python 3.x?
- Разница между генераторами переменного и постоянного тока
- В чем разница между углеродистой и нержавеющей сталью?
- В чем разница между черными и цветными металлами?
- Разница между передней поверхностью и боковой поверхностью режущего инструмента
- Разница между передним углом и задним углом режущего инструмента
- В чем разница между Индустрией 4.0 и Индустрией 5.0?
- Разница между двигателями постоянного и переменного тока
- В чем разница между изготовлением металла и сваркой металла?
- Разница между давлением и расходом