


Как работают бесщеточный двигатель и ESC
<основной класс="главный сайт" id="главный">
В этом уроке мы узнаем, как работают бесколлекторный двигатель и ESC. Эта статья является первой частью следующего видео, где мы изучим принцип работы бесколлекторного двигателя постоянного тока и ESC (электронного регулятора скорости), а во второй части узнаем, как управлять бесщеточным двигателем постоянного тока с помощью Arduino.
Вы можете посмотреть следующее видео или прочитать письменное руководство ниже.
Как это работает
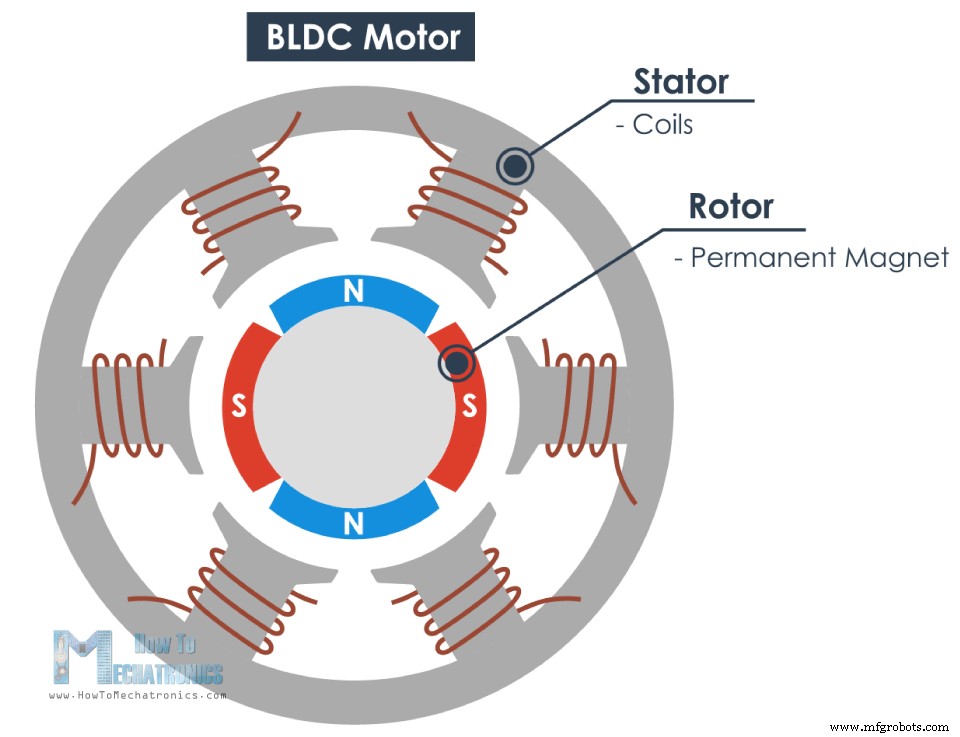
BLDC двигатель состоит из двух основных частей, статора и ротора. Для этой иллюстрации ротор представляет собой постоянный магнит с двумя полюсами, а статор состоит из катушек, расположенных, как показано на рисунке ниже.
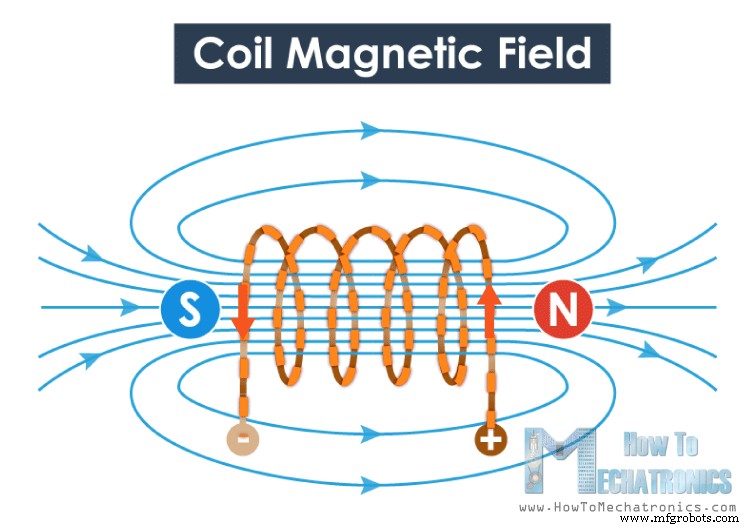
Все мы знаем, что если подать ток через катушку, он создаст магнитное поле, а линии или полюса магнитного поля зависят от направления тока.
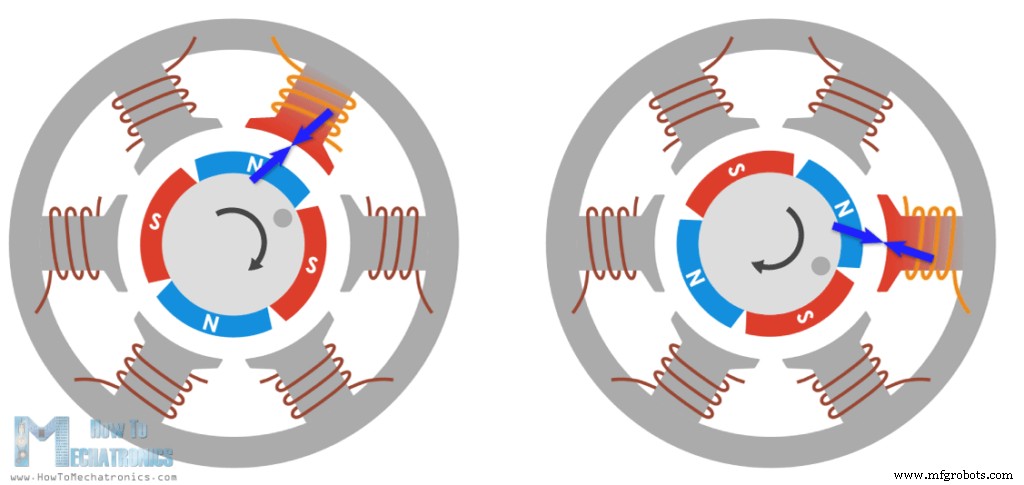
Поэтому, если мы применим соответствующий ток, катушка будет генерировать магнитное поле, которое будет притягивать постоянный магнит ротора. Теперь, если мы активируем каждую катушку одну за другой, ротор будет продолжать вращаться из-за силового взаимодействия между перманентом и электромагнитом.
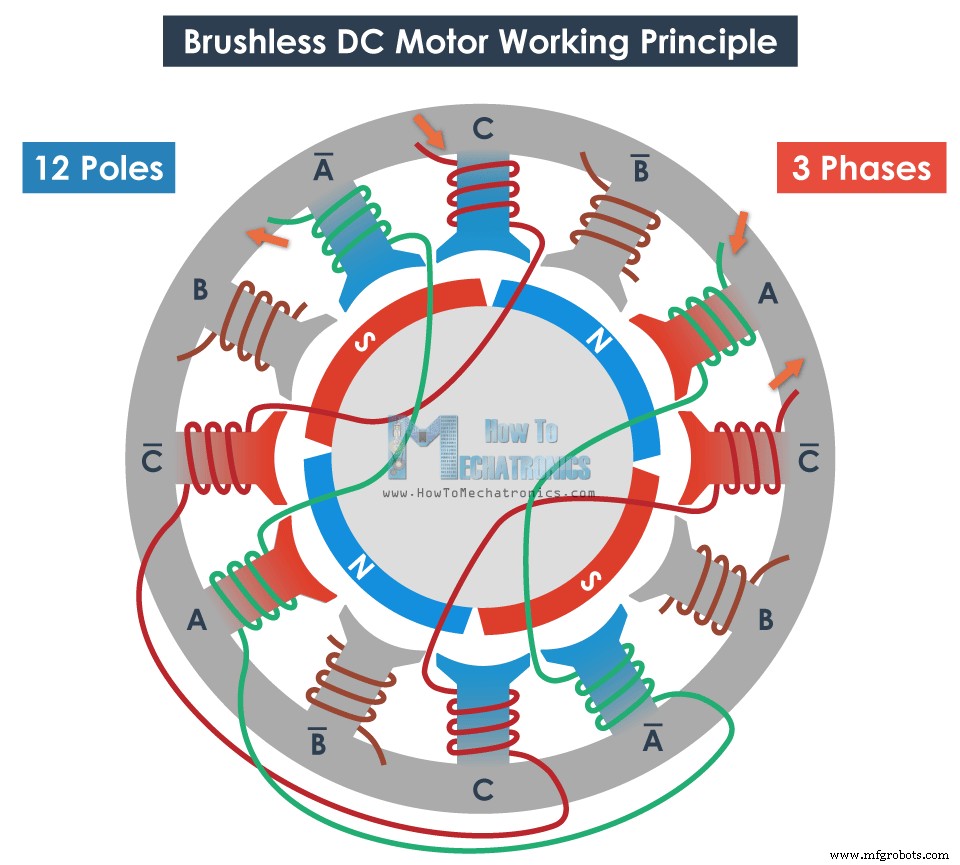
Чтобы повысить эффективность двигателя, мы можем намотать две противоположные катушки как одну катушку таким образом, чтобы полюса были противоположны полюсам ротора, таким образом, мы получим двойную силу притяжения.
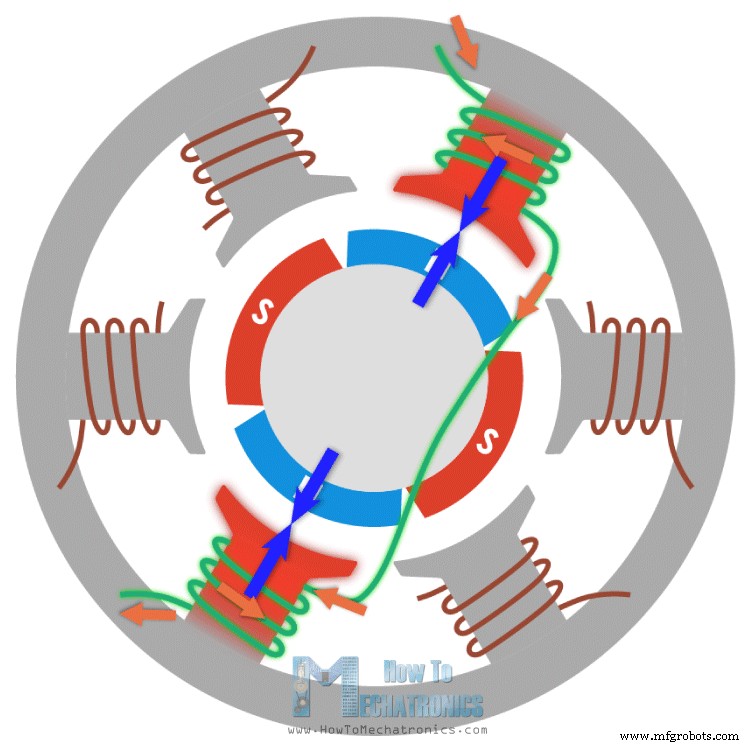
С этой конфигурацией мы можем создать шесть полюсов на статоре всего с тремя катушками или фазой. Мы можем еще больше повысить эффективность, подав питание на две катушки одновременно. Таким образом, одна катушка будет притягивать, а другая — отталкивать ротор.
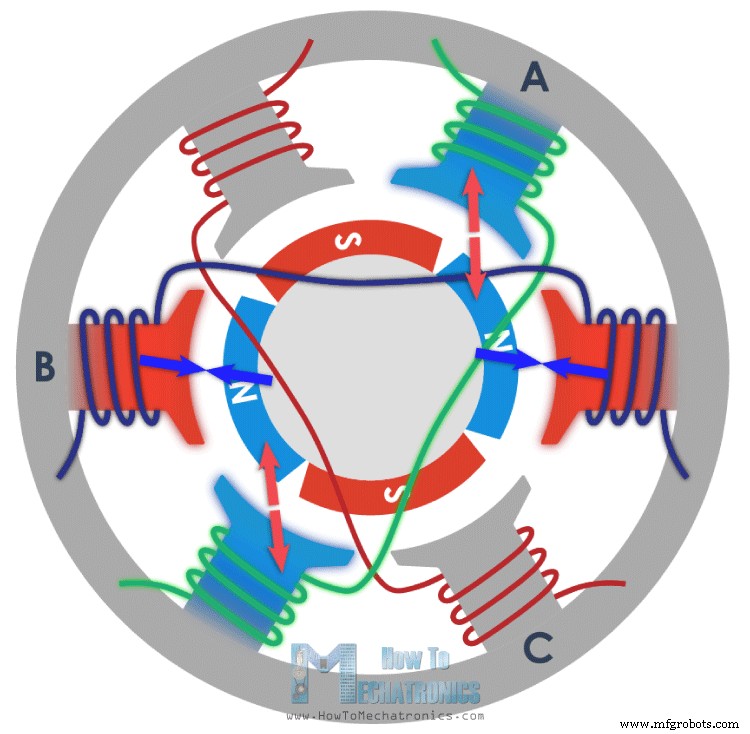
Чтобы ротор совершил полный цикл на 360 градусов, требуется шесть шагов или интервалов.
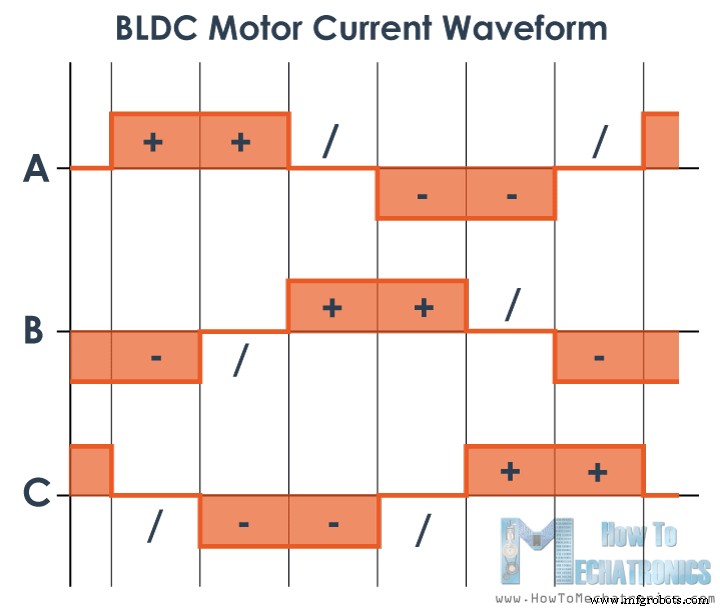
Если мы посмотрим на форму волны тока, то заметим, что в каждом интервале есть одна фаза с положительным током, одна фаза с отрицательным током, а третья фаза отключена. Это наводит на мысль, что мы можем соединить свободные конечные точки каждой из трех фаз вместе и, таким образом, мы можем разделить ток между ними или использовать один ток для питания двух фаз одновременно.
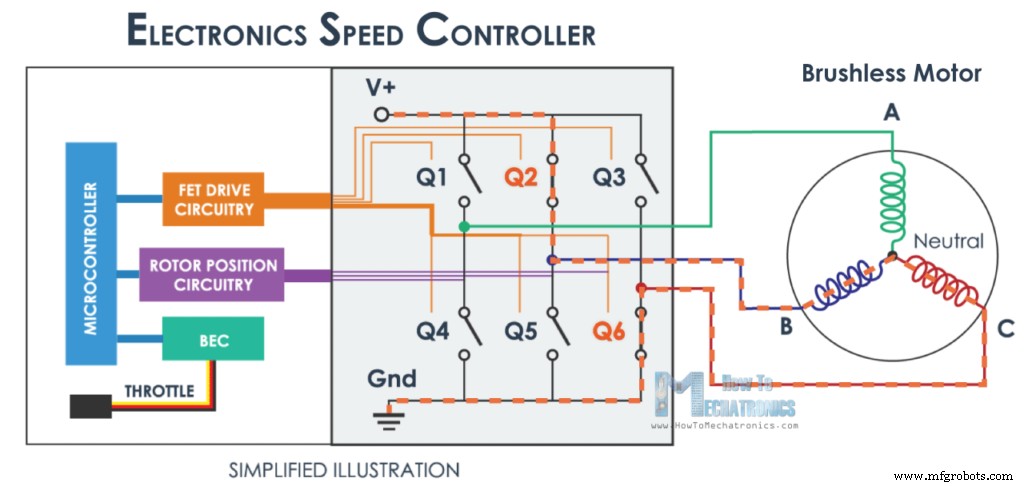
Вот пример. Если мы подтянем фазу A High или подключим ее к положительному напряжению постоянного тока с помощью какого-либо переключателя, например MOSFET, а с другой стороны соединим фазу B с землей, то ток будет течь от VCC через фазу А, нейтральную точку и фазу В, на землю. Таким образом, с помощью всего лишь одного потока мы создали четыре разных полюса, которые заставляют ротор двигаться.
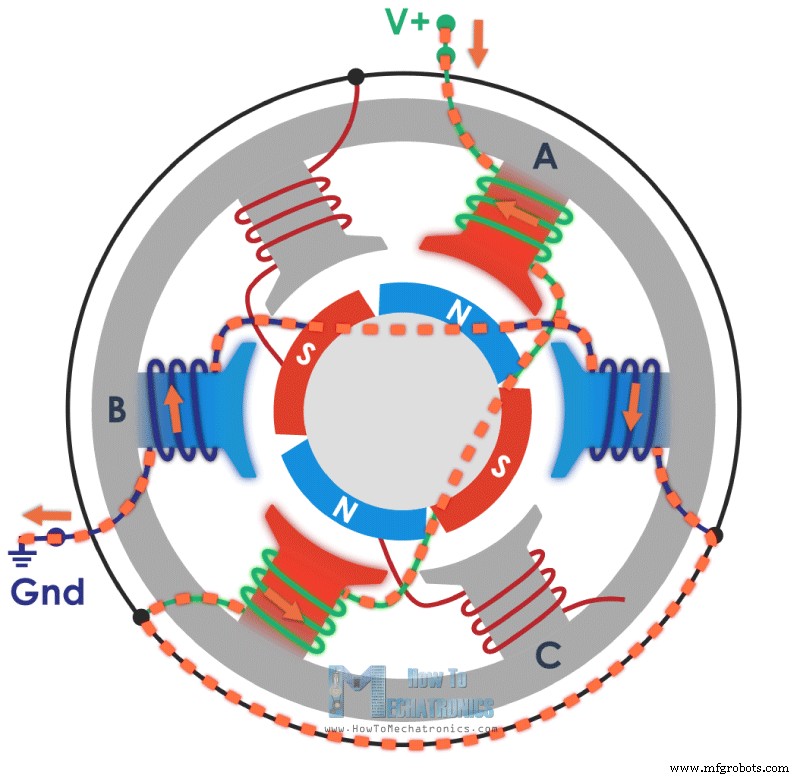
В этой конфигурации у нас фактически есть соединение фаз двигателя звездой, где нейтральная точка соединена внутри, а остальные три конца фаз выходят из двигателя, поэтому из бесщеточного двигателя выходят три провода.
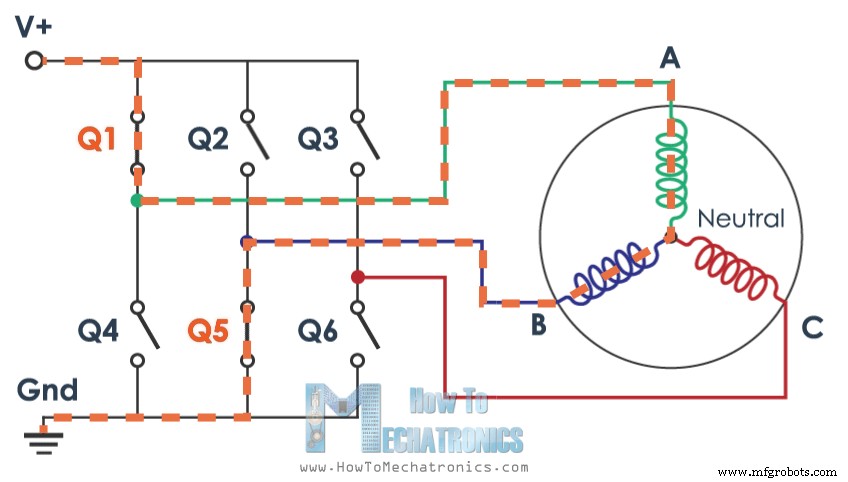
Итак, для того, чтобы ротор прошел полный цикл, нам просто нужно активировать правильные два МОП-транзистора в каждом из 6 интервалов, и для этого на самом деле все ESC.
Как работает ESC (электронный регулятор скорости)
ESC или электронный регулятор скорости управляет движением или скоростью бесщеточного двигателя, активируя соответствующие полевые МОП-транзисторы для создания вращающегося магнитного поля, чтобы двигатель вращался. Чем выше частота или чем быстрее ESC проходит через 6 интервалов, тем выше будет скорость двигателя.
Однако здесь возникает важный вопрос:как мы узнаем, когда какую фазу активировать? Ответ заключается в том, что нам нужно знать положение ротора, и есть два распространенных метода, используемых для определения положения ротора.
Первый распространенный метод заключается в использовании датчиков Холла, встроенных в статор, расположенных под углом 120 или 60 градусов друг к другу.
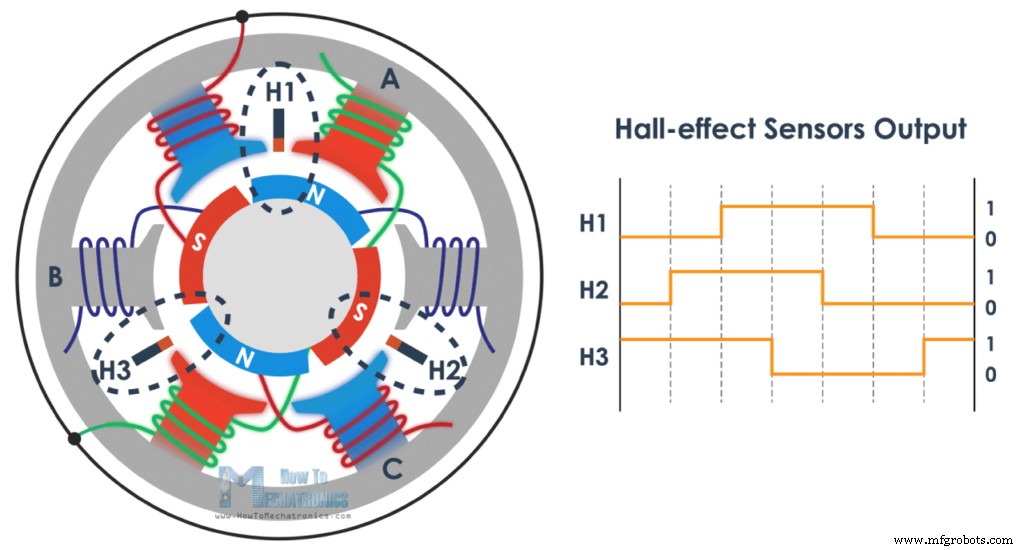
Когда постоянные магниты ротора вращаются, датчики Холла воспринимают магнитное поле и генерируют логический «высокий» для одного магнитного полюса или логический «низкий» для противоположного полюса. В соответствии с этой информацией ESC знает, когда активировать следующую коммутационную последовательность или интервал.
Второй распространенный метод, используемый для определения положения ротора, заключается в измерении обратной электродвижущей силы или обратной ЭДС. Обратная ЭДС возникает в результате прямо противоположного процесса генерации магнитного поля или когда движущееся или изменяющееся магнитное поле проходит через катушку, оно индуцирует ток в катушке.
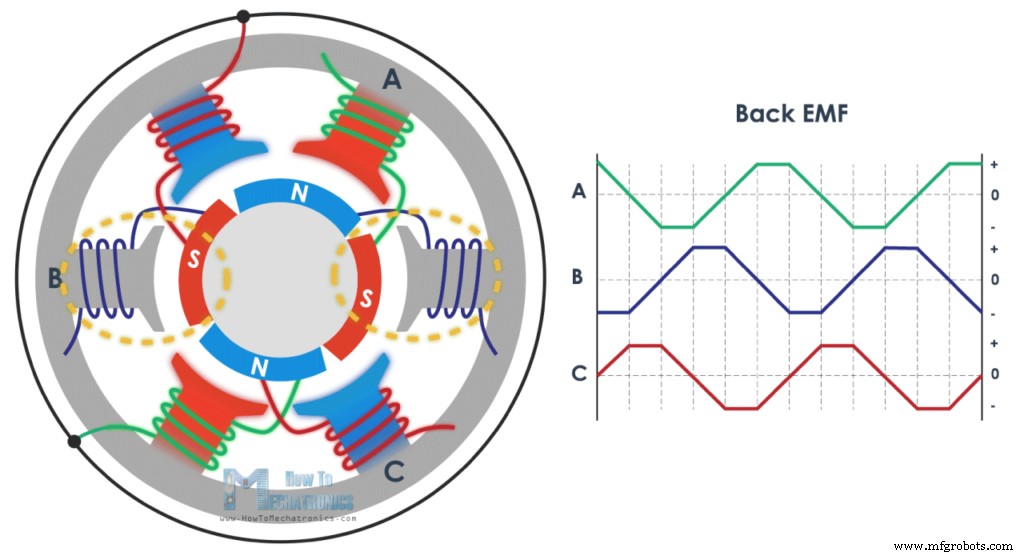
Таким образом, когда движущееся магнитное поле ротора проходит через свободную катушку или ту, которая не активна, оно индуцирует ток в катушке, и в результате в этой катушке возникает падение напряжения. ESC фиксирует эти падения напряжения по мере их возникновения и на их основе прогнозирует или рассчитывает, когда должен произойти следующий интервал.
Таков основной принцип работы бесколлекторных двигателей постоянного тока и ESC, и он останется тем же, даже если мы увеличим количество полюсов как ротора, так и статора. У нас по-прежнему будет трехфазный двигатель, только количество интервалов увеличится, чтобы совершить полный цикл.
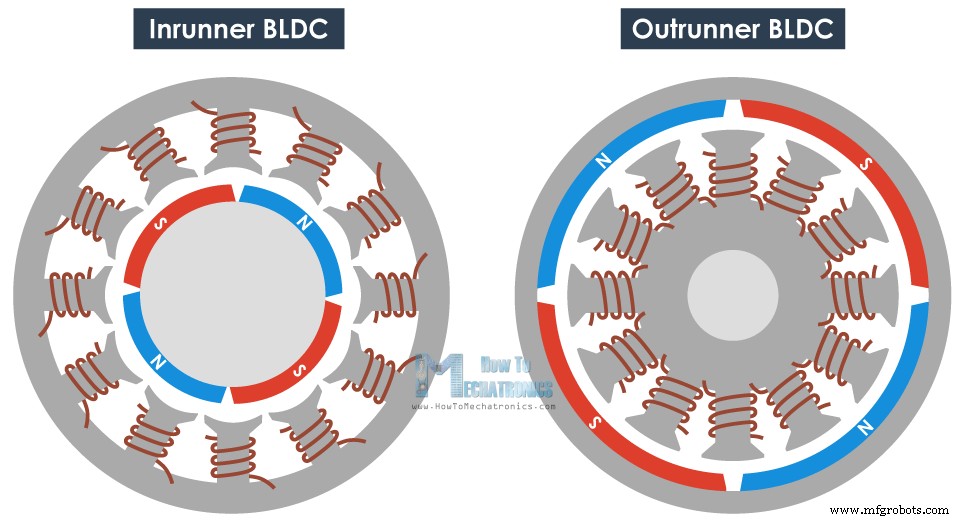
Здесь мы также можем упомянуть, что двигатели BLDC могут быть инраннерами или аутраннерами. Бесщеточный двигатель с внутренним ротором имеет постоянные магниты внутри электромагнитов, и наоборот, двигатель с наружным ротором имеет постоянные магниты снаружи электромагнитов. Опять же, они используют один и тот же принцип работы, и каждый из них имеет свои сильные и слабые стороны.
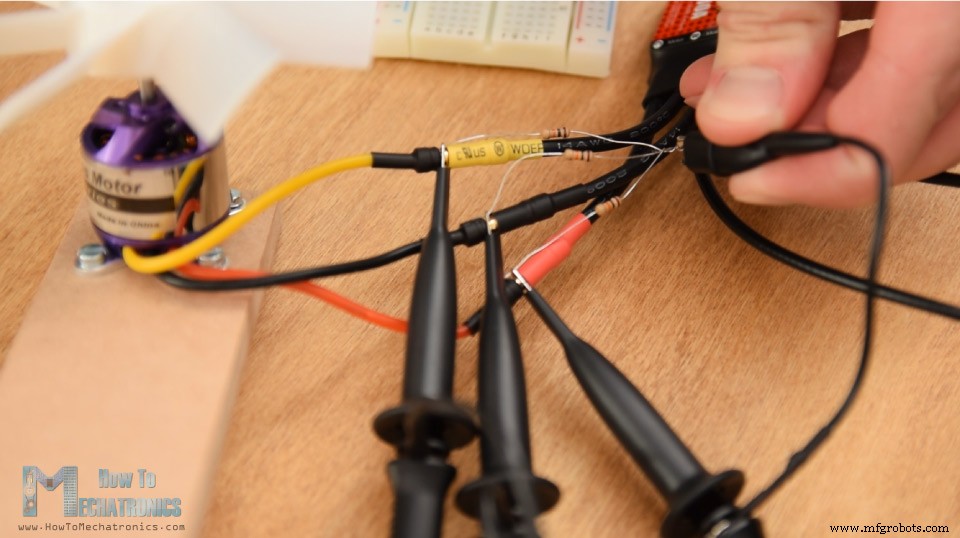
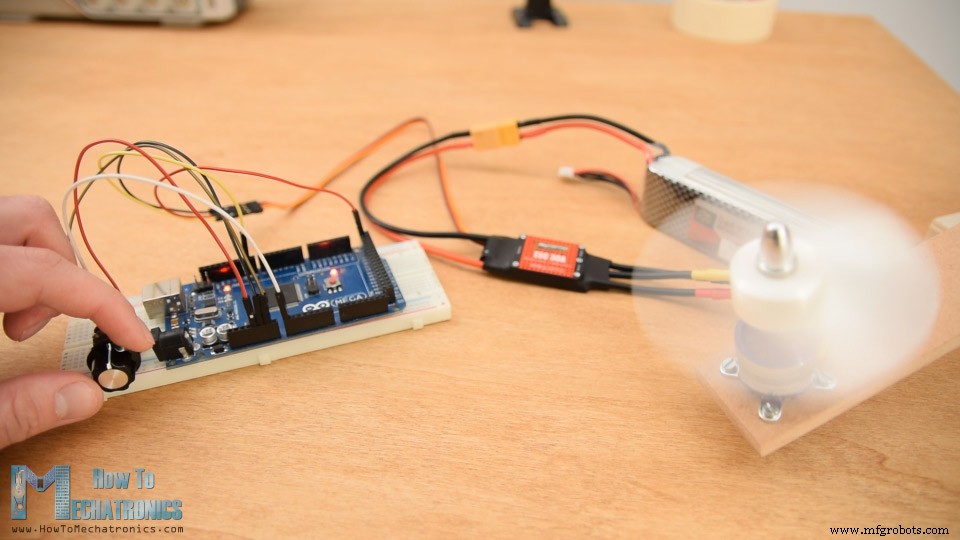
Хорошо, хватит теории, а теперь давайте продемонстрируем и посмотрим в реальной жизни то, что мы объяснили выше. Для этого мы подключим три фазы бесщеточного двигателя к осциллографу. Я подключил 3 резистора в одной точке, чтобы создать виртуальную нейтральную точку, а с другой стороны я подключил их к трем фазам двигателя BLDC.
Первое, что мы можем здесь заметить, это три синусоиды. Эти синусоидальные волны на самом деле являются обратными EFM, генерируемыми в фазах, когда они не активны.
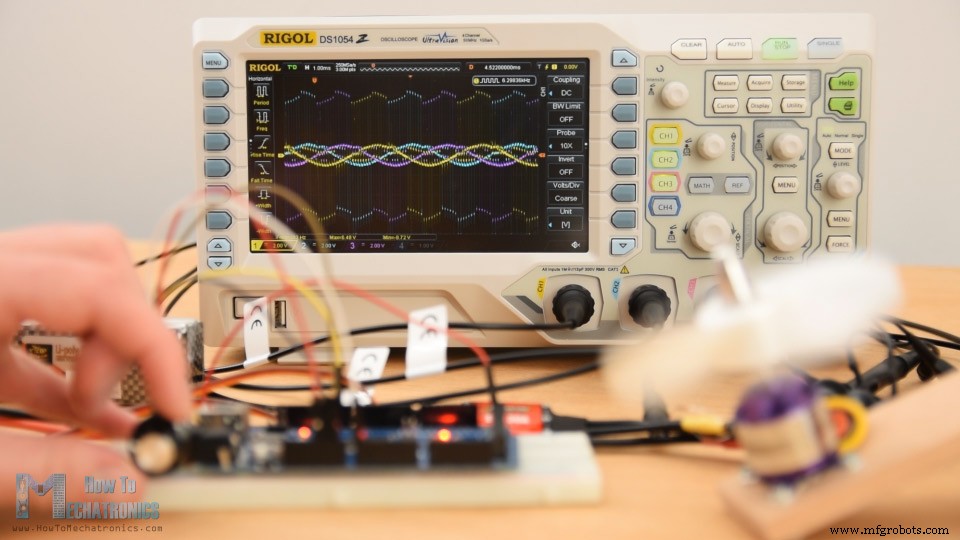
Мы видим, что по мере того, как мы меняем обороты двигателя, частота синусоидальных волн меняется, а также их амплитуда. Чем выше число оборотов, тем выше частота и амплитуда синусоидальных волн противоЭДС. Однако то, что приводит в движение двигатель, на самом деле эти пики, которые являются активными фазами, которые генерируют изменяющееся магнитное поле.
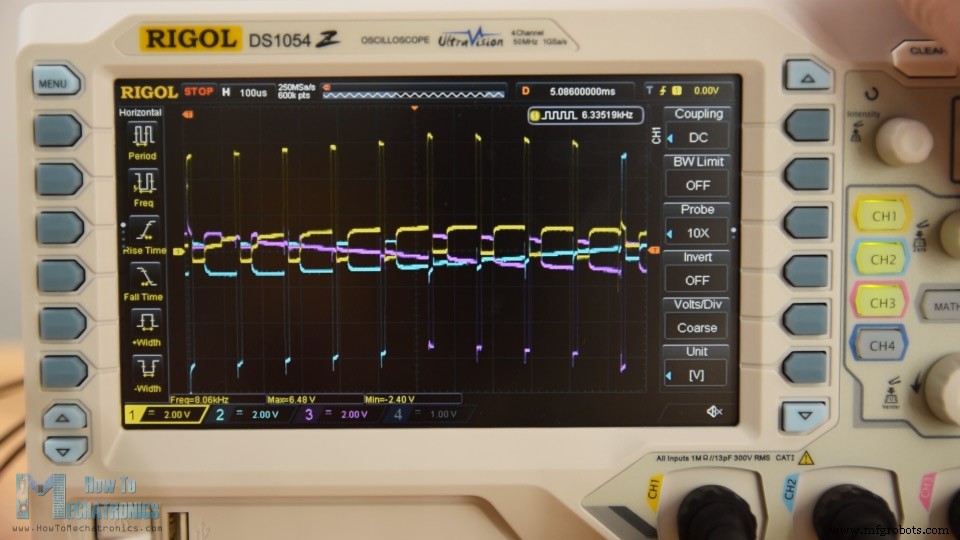
Мы можем заметить, что на каждом интервале есть две активные и одна неактивная фаза. Например, здесь у нас активны фазы A и B, а фаза C неактивна. Затем у нас активны фазы A и C, а фаза B неактивна и так далее.
Здесь я хотел бы поблагодарить Banggood.com за предоставление мне этого осциллографа. Это Rigol DS1054Z, и это один из лучших осциллографов начального уровня в своей ценовой категории. Он имеет четыре входных канала, полосу пропускания 50 МГц, которая может быть изменена до 100 МГц, частоту дискретизации 1 Гвыб/с и относительно большую глубину памяти 24 Мб.

Дисплей 7 дюймов, очень красивый и яркий. Он имеет различные математические функции, фильтры нижних и верхних частот, декодирование SPI и I2C и многое другое. Итак, еще раз большое спасибо Banggood.com и обязательно проверьте этот осциллограф в их магазине.
Тем не менее, это основной принцип работы бесщеточного двигателя. Если вам нужны еще реальные живые примеры и вы научились управлять бесколлекторными двигателями с помощью Arduino, вам следует ознакомиться со второй частью этого руководства.
Надеюсь, вам понравился этот урок и вы узнали что-то новое. Не стесняйтесь задавать любые вопросы в разделе комментариев ниже и не забудьте проверить мою коллекцию проектов Arduino.
Промышленные технологии
- Введение в кулачковые замки и принцип их работы
- Введение в глазные винты и принцип их действия
- Введение в люверсы и принципы их работы
- Что такое трансферное формование и как оно работает?
- Что такое передача и как она работает?
- Как работает щеточный двигатель постоянного тока
- Что такое 3D-печать? - Типы и как это работает
- Что такое дуговая сварка? - Типы и как это работает
- Что такое расточной станок с ЧПУ и как он работает?
- Что такое промышленное сцепление и как оно работает?