


Исследователи разработали кончики пальцев робота для захвата и отпускания объектов в сухих и влажных условиях.
Группа исследователей из Канадзавского университета разработала систему управления роботом — кончиками пальцев — для захвата и отпускания предметов в сухую и влажную погоду.
Исследователи говорят, что в ходе исследования удалось подтвердить, что «захват объекта кончиками пальцев с мягкой поверхностью и высоким трением можно контролировать, применяя подходящую смазку».
Однако они добавили, что необходимо провести больше экспериментов в различных условиях, чтобы применить текущую технологию управления к производственной среде.
Тем не менее, ожидается, что это исследование станет шагом вперед для реализации автоматизации работы, например, по захвату и освобождению объектов в узком пространстве.
Промышленные роботы в настоящее время широко используются и незаменимы в автомобилестроении и других областях. Обычные руки робота подходят для захвата твердых предметов фиксированной формы, в то время как захватывать сложные предметы или осторожно сжимать мягкие предметы непросто.
Также необходимо в различных условиях реагировать на физические характеристики объектов, такие как характеристики поверхности:сухая, влажная и т. д.
Кончик пальца руки робота с мягкой поверхностью деформируется и может довольно легко захватывать предмет сложной формы, так как площадь контакта может увеличиваться за счет деформации поверхности в ответ на форму предмета.
Кончики пальцев с мягкой поверхностью очень эффективны при захвате мягких предметов; даже тофу можно схватить.
Однако, как правило, поверхностное трение мягкого материала велико, что затрудняет высвобождение. Также трудно перемещать объекты в нужное положение, особенно в случаях, когда рабочее пространство узкое.
Исследовательская группа под руководством профессора Тэцуё Ватанабэ из Канадзавского университета проводит исследования по технологии управления захватом объектов кончиками пальцев рук роботов.
В настоящем исследовании группа стремилась разработать систему контроля трения.
Группа использовала мягкие кончики пальцев руки робота для захвата предметов; высвобождение осуществлялось путем нанесения (впрыскивания) смазки.
В этом исследовании в качестве смазки использовался абсолютный этанол (>99,5%), поскольку этанол химически безопасен и легко высыхает, а его поверхностное натяжение низкое.
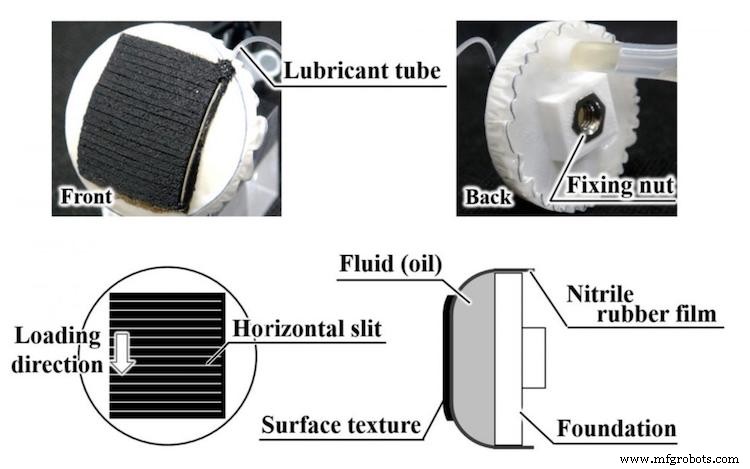
Как видно на рис. 1, к боковым сторонам основания кончика пальца была приклеена пленка из нитрилового каучука, чтобы создать пространство для заполнения маслом для цепной пилы, чтобы получился «жидкий кончик пальца».
Затем на резиновую пленку была нанесена силиконовая «текстура»; материал «текстуры» — силиконовый герметик с прорезями, расстояние между которыми 1,5 мм, перпендикулярно направлению нагрузки.
Прорези были введены для большого трения в условиях смачивания водой и для растекания смазки.
Этим подвижным кончиком пальца были захвачены предметы из различных материалов, используемые для изготовления кухонной утвари, и было подтверждено, что после нанесения смазки трение действительно уменьшилось.
Трение уменьшалось как в сухих, так и во влажных условиях, тогда как в масляных условиях такого смазывающего эффекта не наблюдалось.
Затем было выполнено моделирование задачи упаковки коробки. Бумажная коробка была схвачена кончиками двух подвижных пальцев с обеих сторон.
«Текстура», описанная выше, была прикреплена к каждому жидкому кончику пальца. Стабильный захват подтверждали, помещая груз на бумажную коробку.
После снятия груза в оба кончика пальцев была введена смазка, что вызвало соскальзывание бумажной коробки вниз за довольно короткое время (менее 2,5 с), так что задача упаковки бумажной коробки была выполнена.
Как показано здесь, «текстура» с высоким трением была связана с кончиком пальца жидкости, а введение смазки (в данном случае абсолютного этанола) уменьшило трение.
Таким образом, освобождение и помещение объекта в нужное положение осуществлялось за счет управления трением без движения кончиков пальцев.
Система управления автоматикой
- Проектирование коммутатора для рыболовного траулера
- 3D-печать специальных захватов топливных форсунок для робота Pick and Place
- Essentium и Lehvoss сотрудничают в разработке материалов для аддитивного производства
- DSM и Nedcam для разработки новых приложений для 3D-печати большого размера
- Sepro запускает приложения для улучшения программного обеспечения роботов
- Автоматизация для IML и форм для штабелирования
- «Художественный» робот в NPE
- 3 преимущества моделирования роботов для производителей и других пользователей роботов
- Новости робототехники и автоматизации хороши для ABB, говорит генеральный директор
- Fanuc и Plus One Robotics разрабатывают решения по автоматизации для электронной коммерции