


Демодуляция LVDT:выпрямительный тип против синхронной демодуляции
Узнайте, как сравниваются два метода демодуляции:синхронная демодуляция и демодуляция выпрямительного типа. Здесь мы обсуждаем преимущества и недостатки каждого метода и соответствующие области применения.
В предыдущей статье мы обсудили работу и проблемы демодулятора диодного выпрямителя. В этой статье мы сначала рассмотрим ограничения демодуляторов выпрямительного типа в целом. Затем мы увидим, что синхронный демодулятор может решить некоторые из этих проблем. Наконец, мы рассмотрим недостатки синхронной демодуляции в приложениях LVDT.
Ограничения демодуляторов выпрямительного типа
Хотя прецизионный выпрямитель может решить проблемы простого диодного выпрямителя, демодуляторы выпрямительного типа в целом имеют несколько недостатков. С демодулятором выпрямительного типа нам нужен доступ к центральному отводу вторичной обмотки LVDT, чтобы выпрямить напряжение на каждой из вторичных обмоток. Следовательно, этот тип демодуляции применим только к 5-проводным LVDT (рисунок 1 (b)).
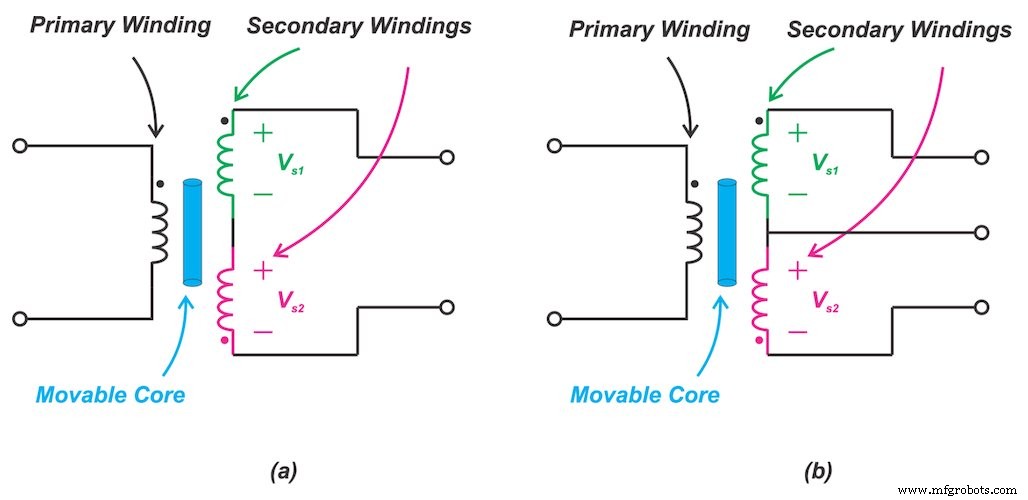
Рис. 1. (а) 4-х проводный и (б) 5-проводные LVDT.
Существуют и другие методы демодуляции, которые не требуют доступа к центральному отводу и могут определять положение сердечника путем обработки разности напряжений между двумя вторичными обмотками. Эти демодуляторы позволяют нам использовать 4-проводной LVDT, как показано на рисунке 1 (а).
Действительно ли важно иметь минимальное количество электрических подключений?
Во многих случаях схемы кондиционирования расположены на большом расстоянии от датчика. Хорошим примером является проведение измерений в суровых условиях радиоактивных приложений, где схемы кондиционирования следует размещать в безопасных зонах, даже на расстоянии до нескольких сотен метров от LVDT. В этих случаях может быть сложно передать два вторичных напряжения на большое расстояние через 5-проводную конфигурацию. Поскольку модуль кондиционирования расположен вдали от LVDT, необходимо иметь хорошо сбалансированную проводку с низкой распределенной емкостью. Это означает значительное увеличение стоимости электромонтажа.
Еще одним недостатком демодулятора выпрямительного типа является его ограниченное подавление шума. Рассмотрим датчик LVDT со смещением сердечника в соответствии с синусоидальной формой волны при 250 Гц. Красная кривая на рисунке 2 показывает демодулированный выходной сигнал этого LVDT, полученный с использованием типичного диодного выпрямителя.
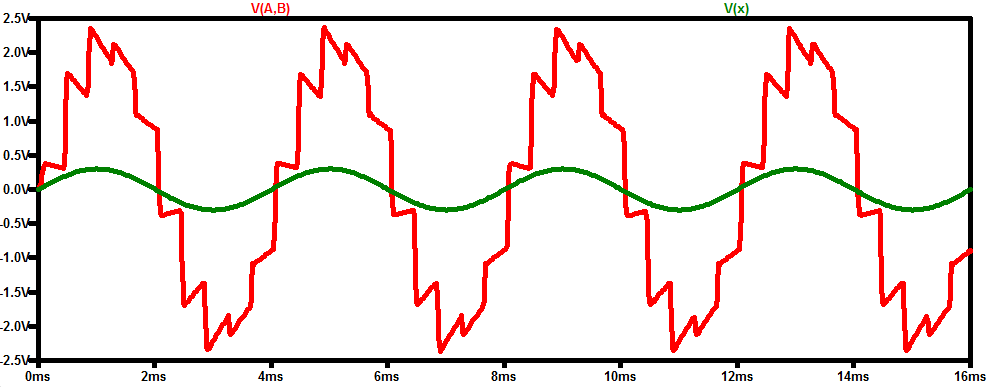
Рисунок 2.
На этом рисунке зеленая кривая показывает смещение сердечника x. Как видите, выходной сигнал выглядит как усиленная версия x, за исключением того, что он имеет некоторые резкие изменения, соответствующие некоторым высокочастотным компонентам.
Чтобы избавиться от этих нежелательных высокочастотных компонентов, мы можем использовать фильтр нижних частот с частотой среза, немного превышающей механическую полосу пропускания системы (250 Гц). Следовательно, даже с идеальным фильтром нижних частот все частотные составляющие до 250 Гц будут проходить через фильтр без ослабления. Следовательно, любой шумовой компонент ниже 250 Гц, который поступает на выход датчика, также будет появляться на выходе демодулятора.
Низкие шумовые характеристики - главный недостаток демодуляторов выпрямительного типа. Это ограничение становится еще более заметным при использовании длинных кабелей. Шумовые характеристики вместе с требованиями к 5-проводной конфигурации делают эту схему непригодной для прокладки длинных кабелей в удаленные места. Синхронная демодуляция, обсуждаемая ниже, может решить эти две проблемы.
Синхронная демодуляция
Рассмотрим LVDT, показанный на рисунке 3. Предположим, что у нас есть \ [V_ {EXC} =A_p \ cos (2 \ pi \ times f_p \ times t) \].
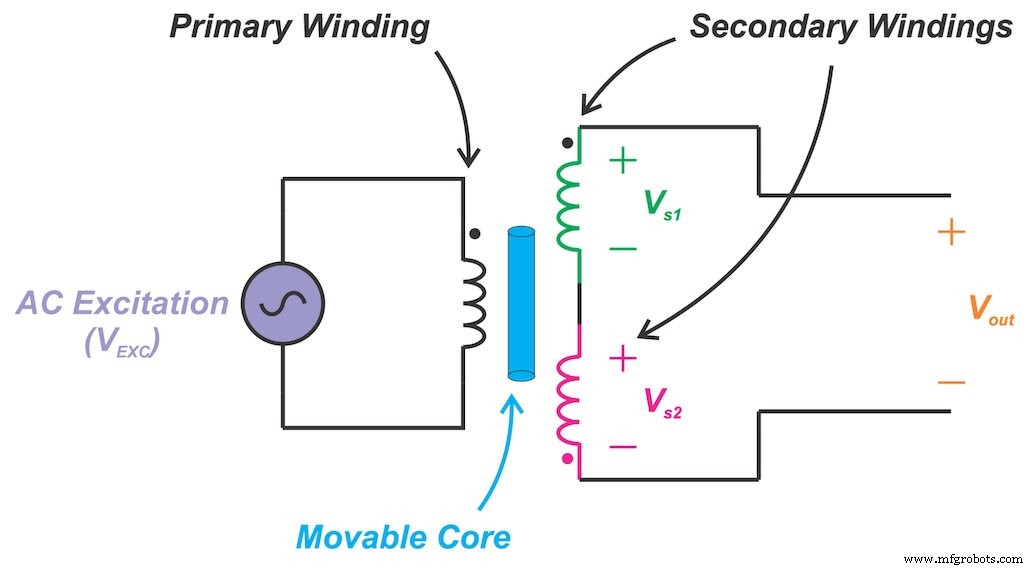
Рисунок 3. Пример LVDT
Дифференциальный выход (\ [V_ {out} \]) представляет собой амплитудно-модулированный сигнал и может быть выражен как:
\ [V_ {out} =A_s \ times x \ times \ cos (2 \ pi \ times f_p \ times t + \ phi) \]
Уравнение 1.
где x - смещение сердечника, а \ [A_s \] - коэффициент масштабирования, который дает общую выходную амплитуду для данного x. Фазовый член \ [\ phi \] - это разность фаз, вызванная LVDT между первичным и вторичным напряжениями. В идеале этот фазовый сдвиг должен быть очень небольшим, особенно в районе определенной частоты, указанной производителем. Однако обычно нам необходимо учитывать этот фазовый сдвиг.
Метод синхронной демодуляции умножает дифференциальный выходной сигнал LVDT на сигнал возбуждения (или сигнал, синхронный с сигналом возбуждения в целом). Это дает:
\ [V_ {demod} =V_ {out} \ times V_ {EXC} =A_s \ times x \ times \ cos (2 \ pi \ times f_p \ times t + \ phi) \ times A_p \ cos (2 \ pi \ times f_p \ times t) \]
Уравнение 2
что упрощается до:
\ [V_ {demod} =\ frac {1} {2} \ times A_s \ times x \ times A_p [\ cos (\ phi) + \ cos (2 \ pi) \ times 2f_p \ times t + \ phi)] \]
Первый член в скобках - это постоянный ток, однако второй член имеет двойную частоту возбуждения. Следовательно, узкий фильтр нижних частот может удалить второй член, и мы имеем:
\ [V_ {filter} =\ frac {1} {2} \ times A_s \ times x \ times A_p \ cos (\ phi) \]
Уравнение 3
Это дает нам постоянное напряжение, пропорциональное смещению сердечника x.
Синхронная демодуляция посредством умножения на прямоугольную волну
Мы можем использовать аналоговый умножитель, чтобы умножить выходной сигнал LVDT на синусоидальную волну возбуждения (уравнение 2); однако аналоговые умножители дороги и имеют ограничения по линейности. Вместо умножения на синусоидальную волну мы можем умножить сигнал на прямоугольную волну, синхронную с входом возбуждения.
Вы можете задаться вопросом, как можно использовать прямоугольную волну вместо синусоидальной? Переключение прямоугольной волны между ± 1 может быть выражено как бесконечная сумма синусоид на нечетных гармониках частоты прямоугольной волны. Следовательно, прямоугольная волна с частотой \ [f_p \] может быть выражена как:
\ [v_ {squarewave} (t) =\ sum_ {n =1, 3, 5} ^ {\ infty} \ frac {4} {n \ pi} \ sin (2 \ пи \ умножить на nf_p \ умножить на t) \]
Когда выходной сигнал LVDT (синусоидальная в \ [f_p \]) умножается на прямоугольную волну, фундаментальная составляющая прямоугольной волны \ [(\ frac {4} {\ pi} \ sin (2 \ pi \ times f_p \ times t)) \] создает составляющую постоянного тока, а также высокочастотную составляющую в \ [2f_p \]. Высокочастотная составляющая будет подавлена фильтром нижних частот, как объяснено в предыдущем разделе, и на выходе появится желаемая составляющая постоянного тока.
Умножение на высшие гармоники прямоугольной волны даст высокочастотные составляющие, кратные \ [f_p \]. Следовательно, составляющая постоянного тока - единственная, которая появляется на выходе фильтра, как и в случае умножения сигнала на синусоидальную. Основное преимущество умножения на прямоугольный сигнал состоит в том, что он может значительно упростить схемную реализацию демодулятора.
Реализация схемы синхронного демодулятора
Синхронный демодулятор на основе прямоугольных импульсов показан на рисунке 4.
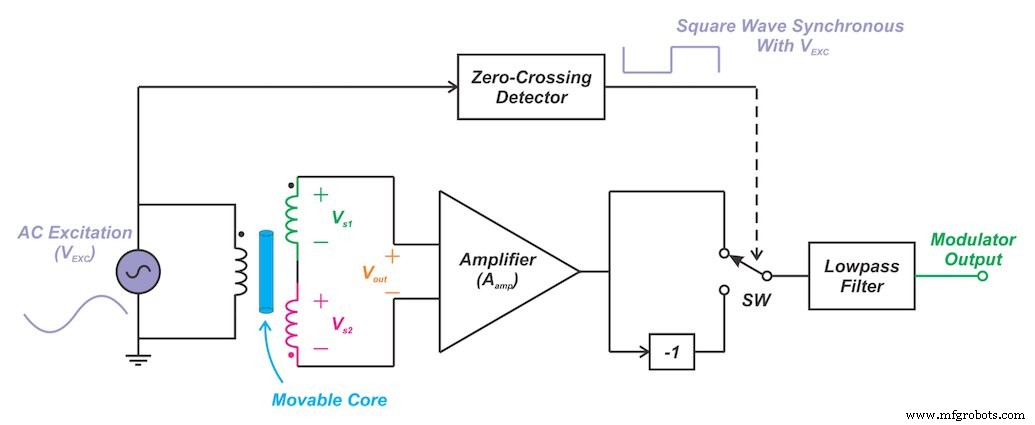
Рисунок 4. Синхронный демодулятор на основе прямоугольных импульсов
В этом случае усиленная версия выхода LVDT умножается на прямоугольную волну, а не на синусоидальную форму возбуждения. Прямоугольная волна синхронна с входом возбуждения и получается с помощью «Детектора перехода через ноль», как показано на приведенной выше блок-схеме.
Чтобы выполнить умножение на прямоугольную волну, коэффициент усиления сигнальной цепи периодически изменяется в пределах \ [± A_ {amp} \] (\ [A_ {amp} \] - коэффициент усиления усилителя). Обратите внимание, что нижний путь включает усиление -1. Это достигается за счет использования прямоугольной волны для управления переключателем SW, который изменяет путь сигнала между верхним и нижним путем. Это фактически эквивалентно умножению выходной мощности усилителя на прямоугольную волну.
Наконец, фильтр нижних частот используется для сохранения постоянной составляющей выходного сигнала и подавления высокочастотных составляющих.
Плюсы синхронных демодуляторов LVDT
Основное преимущество синхронной демодуляции - ее шумовые характеристики. Как обсуждалось выше, частота синхронной демодуляции сдвигает выход LVDT на постоянный ток и использует фильтр нижних частот, чтобы сохранить эту составляющую постоянного тока. Фильтр нижних частот подавляет все компоненты шума за пределами его полосы пропускания.
Поскольку наш полезный сигнал находится на постоянном токе, мы можем использовать узкий фильтр нижних частот. Это ограничит полосу пропускания системы и позволит демодулятору значительно подавить большую часть шума, который попадает на выход LVDT. Более того, при синхронной демодуляции мы можем использовать 4-проводной LVDT.
Минусы синхронных демодуляторов LVDT
Хотя синхронная демодуляция может обеспечить более высокую помехоустойчивость по сравнению с демодуляторами выпрямительного типа, ее выход зависит от амплитуды напряжения возбуждения (\ [A_p \] в уравнении 3). Следовательно, при синхронной демодуляции стабильность амплитуды входного сигнала возбуждения имеет решающее значение.
Другая проблема заключается в том, что выходной сигнал демодулятора зависит от фазового сдвига передаточной функции LVDT (\ [\ cos (\ phi) \] в уравнении 3). В идеале этот фазовый сдвиг должен быть очень маленьким; однако он непостоянен и может изменяться в зависимости от рабочей точки. В практических схемах демодулятора обычно используется схема фазовой компенсации для регулировки фазы создаваемой прямоугольной волны. Компенсационная сеть может увеличить сложность демодулятора.
Однако эта повышенная сложность делает схему пригодной для относительно более длинных кабелей по сравнению с демодуляторами выпрямительного типа. Это связано с тем, что член фазового сдвига \ [\ phi \] может использоваться для учета задержки, вызванной проводкой. Следовательно, схему фазовой компенсации также можно использовать для компенсации задержки кабеля и обеспечения пригодности схемы для более длинных проводов.
Другие методы демодуляции
Синхронная демодуляция обеспечивает более высокую помехоустойчивость и требует всего четырех электрических соединений; однако у него есть свои ограничения, такие как зависимость от амплитуды входного возбуждения, а также проблема фазового сдвига. Для решения этих проблем существует несколько других методов демодуляции. Эти методы обычно используют концепции логометрических измерений и основанные на DSP методы, чтобы обойти ограничения синхронных демодуляторов.
Более подробное обсуждение синхронной демодуляции применительно к другим типам датчиков см. В следующих статьях:
- Введение в синхронную демодуляцию
- Синхронная демодуляция с использованием аналоговых умножителей и умножителей на основе переключателей
- Аналоговая и цифровая реализация синхронного демодулятора
Чтобы увидеть полный список моих статей, посетите эту страницу.
Интернет вещей
- Open DDS против программного обеспечения RTI DDS
- Внутри автономных транспортных средств завтрашнего дня:от проверки концепции до реальности
- Аппаратная безопасность DDS - SGX, часть 3:усиленные службы DDS
- Аппаратная безопасность DDS - SGX:Часть 2 (Micro + Security + SCONE)
- Аппаратная безопасность DDS - SGX:Часть 1 (Обзор)
- MQTT и DDS:межмашинное взаимодействие в IoT
- Что такое IIoT? Учебник по промышленному Интернету вещей
- Тестирование программного обеспечения в РТИ
- Плагин Telegraf для Connext DDS:создание системы мониторинга временных рядов с помощью DDS и InfluxDB
- Токарные станки с ЧПУ оснащены технологией синхронного шпинделя