


Сравнение протоколов связи в RTLS:угол прихода и диапазон фаз
По мере того, как индустрия Интернета вещей (IoT) продолжает процветать, многие компании начали разрабатывать системы определения местоположения в реальном времени (RTLS) для коммерческого использования. Есть несколько протоколов, которые можно использовать в RTLS для определения местоположения помеченного актива. Некоторые из новых используемых технологий - это определение диапазона фаз и угла прихода (AoA). В этой статье мы рассмотрим обе технологии, а также их преимущества и недостатки в рамках RTLS.
Что такое технология фазового ранжирования?
Phase Ranging определяет местоположение метки актива путем измерения сдвига фазы в оба конца сигналов, отправляемых от метки к маяку, на нескольких разных частотах. Эта информация о фазе затем используется для определения расстояния туда и обратно. Поскольку маломощные радиомодули BLE могут измерять фазу с высокой точностью, этот метод позволяет использовать технологию определения дальности с гораздо меньшими затратами, чем системы, основанные на времени (например, UWB).
После того, как тег измерил дальность действия по крайней мере до четырех маяков (в идеале> 6), он может трилатерировать свое местоположение. Все это происходит за несколько сотен миллисекунд.
Что такое технология угла прибытия (AoA)?
Подобно фазовому ранжированию, AoA использует измерения фазы для определения местоположения, однако на этом сходство заканчивается. Вместо того, чтобы измерять диапазон от метки до маяка, AoA оценивает линию пеленга от метки до локатора (устройства, которое принимает сигналы метки). Локатор делает это, используя антенную решетку и переключаясь между элементами во время приема сигнала. Сравнивая фазовые сдвиги между этими элементами, можно вычислить угол входящего сигнала. Когда сигнал от метки принимается несколькими локаторами, местоположение метки можно определить, оценив, где пересекаются «лучи» от каждого локатора.
Изучение различий
Теперь, когда у вас есть общее представление о фазовом ранжировании и AoA, давайте рассмотрим ключевые функции, преимущества и недостатки этих протоколов связи RTLS.
-
Разрешение
В системе AoA разрешение зависит от расстояния до локатора. Это можно представить в виде спиц на колесе; чем дальше вы удаляетесь от ступицы, тем больше расстояние между спицами. Точно так же, чем дальше от локатора находится метка AoA, тем грубее становится разрешение местоположения. Это накладывает ограничения на размещение локатора, например их нельзя монтировать на слишком высоких потолках. В отличие от этого, разрешающая способность системы определения фазового диапазона зависит исключительно от ширины полосы сигнала и не зависит от дальности, поэтому маяки просто необходимо разместить так, чтобы обеспечить адекватное покрытие и обеспечить хорошую геометрию дальности для тегов.
-
Стоимость
Для измерения углов локатору AoA требуется относительно большая настраиваемая многоэлементная антенная решетка. Из-за такой аппаратной сложности AoA обычно дороже, чем системы фазового ранжирования. В маяках для измерения фазового диапазона могут использоваться базовые всенаправленные антенны (микросхемы или встроенные). Сравнительная простота компонентов Phase Ranging снижает накладные расходы для пользователя. -
Установка
Алгоритм, обычно используемый для вычисления AoA, называется MUSIC (MUltiple SIgnal Classification). С вычислительной точки зрения это трудоемкая процедура - реализовать MUSIC на теге актива или локаторе невозможно. Это требует, чтобы каждый локатор отправлял образцы для обработки либо на «граничный процессор», либо в облако. Учитывая количество данных, предпочтительный способ сделать это - через кабельное соединение Ethernet, что увеличивает как стоимость локатора, так и сложность установки. С другой стороны, теги Phase Ranging рассчитывают свое собственное местоположение. Им не нужна обширная транспортная инфраструктура. Благодаря использованию низкоэнергетической глобальной сети (LPWAN) для транзитного соединения кабели не требуются. -
Многопутевость
Любой, кто занимается отслеживанием объектов внутри помещений, знает, что металлические предметы могут отражать сигналы. Большая часть работы, проделанной Link Labs с системами определения фазового диапазона, была направлена на минимизацию влияния отражения. В этом случае AoA нельзя сравнивать. Поскольку ранжирование измеряет время прихода сигнала, оно естественным образом распознает многолучевость. В угловой системе определить многолучевость сложнее. Хотя алгоритм MUSIC может помочь различить многолучевое распространение, он имеет существенный недостаток:алгоритм предполагает, что любые принятые сигналы некоррелированы (другими словами, сигнал не исходит из одного источника). Однако многолучевые отражения сильно коррелированы, поскольку они представляют собой задержанные версии одного и того же сигнала. Это требует использования дополнительной информации, такой как мощность сигнала, для расчета приблизительного расстояния до метки, но измерения дальности на основе силы сигнала заведомо неточны, особенно на больших расстояниях от локатора. -
Точность
Точность, возможно, является наиболее важным показателем RTLS, но также и наиболее тонким. В качестве примера приведем кумулятивную функцию распределения (CDF) точности местоположения склада с использованием системы определения фаз OnSite XLE от Link Lab.
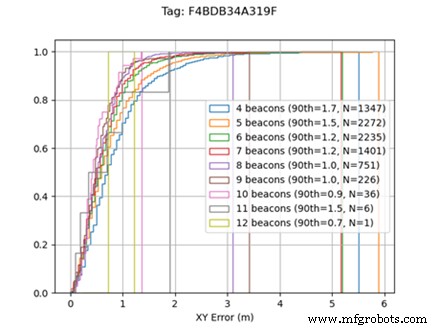
Ось Y представляет процентили, например. 0,5 =50% - ось X представляет параметр - в данном случае точность системы в метрах
Чтобы обеспечить реалистичные ожидания, мы указываем точность 90-го процентиля (то есть точность, которая достигается в 90% случаев; это статистика, указанная в легенде сюжета вместе с количеством маяков, используемых в исправлении) - в этом примере это около 1,2 метра. Однако, если бы мы вместо этого использовали 50-й процентиль в качестве спецификации, мы могли бы сказать, что он имеет точность 40 см. При сравнении характеристик точности системы крайне важно, чтобы лежащая в основе методология была одинаковой, в противном случае сравнение будет некорректным. В конце концов, глядя на график выше, обратите внимание, что в некотором процентном соотношении миллиметр точность была достигнута. Менее скрупулезные поставщики систем могут использовать более низкие процентили, чтобы их система выглядела более точной, чем она есть на самом деле, поэтому всегда спрашивайте, при каких условиях измерялась точность и какие статистические критерии использовались.
Выбор фаз в AirFinder OnSite XLE
Понимание различий между Phase Ranging и AoA жизненно важно при принятии решения о том, какое решение для отслеживания активов внедрить. Тем не менее, определение диапазона фаз обычно считается лучшей технологией в целом. В Link Labs наш AirFinder Onsite Xtreme Low Energy (XLE) использует технологию определения фазового диапазона, чтобы обеспечить пользователям точность без ущерба для срока службы батареи и стоимости метки. Чтобы получить дополнительную информацию о XLE, закажите демо сегодня.
Интернет вещей
- MQTT и DDS:межмашинное взаимодействие в IoT
- Решения IIoT | 6 промышленных коммуникационных решений IoT
- Фаза переменного тока
- Как Bluetooth с низким энергопотреблением приносит пользу RTLS
- Что такое RTLS? [ОБНОВЛЕНИЕ 2021]
- Управление рисками капитальных вложений RTLS
- 5 вещей, которые следует учитывать при выборе медицинского RTLS
- Создание архитектуры RTLS для достижения успеха
- 18 реальных примеров использования RTLS в транспортных узлах
- Делаем блокчейн и DLT менее требовательными к ресурсам