


Сколько осей нужно вашему роботизированному позиционеру?
Вы решили, что вам нужен роботизированный позиционер... но сколько осей вам нужно?
Существует так много моделей позиционеров в самых разных стилях. У некоторых есть 1 простая ось, а у других их много!
Что еще больше сбивает с толку, так это диапазон конфигураций, которые могут иметь позиционеры. Оси могут быть установлены вертикально, горизонтально и под любым промежуточным углом.
Выбор позиционера со слишком большим или слишком малым числом осей может означать напрасную трату бюджета; Но сколько слишком много!?
Если вы подумываете о роботизированном позиционере, вы, вероятно, уже рассмотрели несколько разных моделей. Вы, наверное, видели одноосные поворотные столы, двухосевые позиционеры и многоосевые колеса обозрения. Вы, вероятно, пробовали различные бренды, стили и ценовые диапазоны.
К настоящему времени, если вы честны, вы, вероятно, начинаете немного уставать от позиционеров.
Проблема с позиционерами в том, что это не просто случай, когда можно просто сказать:«Я куплю вот это» и на этом остановиться. Выбранный вами позиционер повлияет на простоту интеграции и программирования вашей роботизированной ячейки. Вы же не хотите выбрать не тот вариант и потратить больше времени на развертывание и программирование робота, чем необходимо.
Например, если вы хотите получить 5-осевой позиционер с 6-осевым роботом, вам нужно контролировать 11 осей! Если необходимо иметь столько осей, прекрасно. Но, если в этом нет необходимости, вы можете пожалеть о своей покупке.
Почему "Сколько осей?" сбивает с толку вопрос
Вопрос о том, сколько осей нужно вашему механизму, вполне закономерен. Однако на этот вопрос сложно ответить удовлетворительно.
Когда мы говорим только о промышленных роботах, обычно говорят, что нужны 6-осевые роботы. Это не всегда так, но в большинстве случаев так. Причина этого в том, что для достижения точек в рабочей области робота из любого положения и ориентации требуется 6 осей.
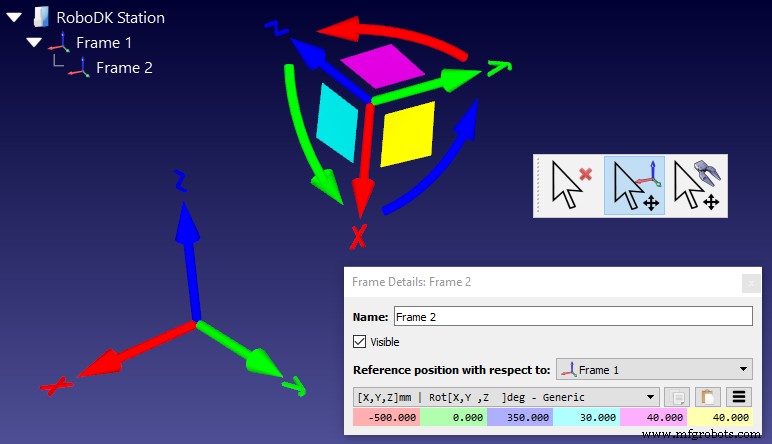
Как мы объяснили в нашем учебнике по углу Эйлера, положение рабочего органа робота контролируется 6 параметрами:3 параметрами поступательного движения (X, Y и Z) и 3 параметрами вращения (Rot[X], Rot[Y] и Rot [Я]).
Если у вашего робота менее 6 осей, вы будете ограничивать гибкость робота. Это имеет смысл для некоторых роботов — например. роботы-укладчики, которым нужно только приближаться к объектам сверху. Однако в целом 6-осевые промышленные роботы являются наиболее полезными для широкого круга задач.
Однако за пределами 6 осей ваш механизм становится «лишним».
Например, 7-осевые роботы могут достигать тех же точек в своем рабочем пространстве, что и робот с 6 степенями свободы. Однако управление резервным механизмом усложняется. В результате вы не захотите добавлять дополнительные ГРИП, если они не нужны.
Добавление позиционера означает увеличение степени свободы робота. Это может привести или не привести к избыточной системе.
Нужна ли вам дополнительная глубина резкости, зависит от конкретных потребностей вашей задачи.
7 шагов для определения количества осей, необходимого для вашего приложения
Чтобы определить, сколько осей вам нужно, нужно более внимательно изучить требования вашего приложения.
Вот процесс, который вы можете использовать, чтобы определить некоторых потенциальных позиционеров, которые могут работать на вас. Это позволяет вам увеличить несколько потенциальных моделей и правильно их оценить. Если ни один из этих вариантов не подходит, вы можете снова уменьшить масштаб и использовать полученную информацию, чтобы выбрать лучший позиционер.
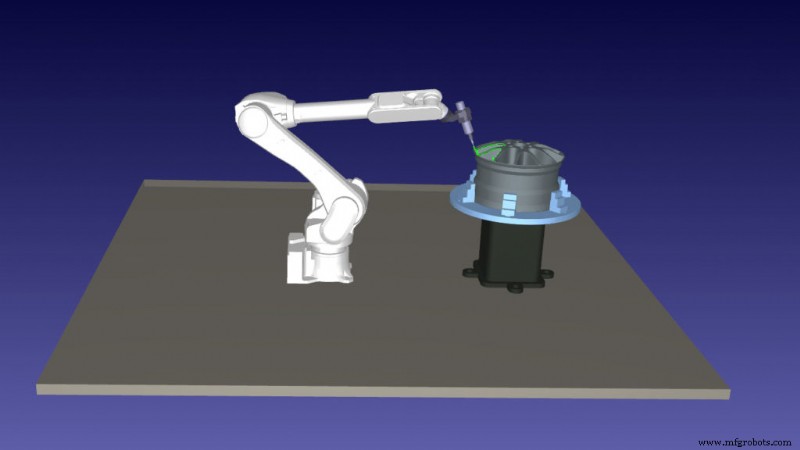
- Рассмотрите требования вашей задачи, уделяя особое внимание необходимому рабочему пространству. Хороший способ сделать это — создать приложение в симуляторе робота.
- Обратите внимание, какие аспекты задачи невозможны при использовании одного робота. Какие части рабочего пространства недоступны? Какие движения невозможны?
- Используя эту информацию, сделайте обоснованное предположение об одном или двух типах позиционера, которые могут удовлетворить ваши потребности. Не забудьте принять во внимание полезную нагрузку, необходимую для удержания ваших заготовок.
- Найдите на рынке несколько позиционеров, соответствующих вашим критериям, и протестируйте их в моделировании. Для каждого позиционера, который вы пробуете, не забудьте сохранить настройки как новый проект, так как вы вернетесь к одному из проектов позже.
- Если одна из моделей работает идеально, отлично! Тем не менее, проверьте несколько вариантов, чтобы увидеть, какие свойства действительно необходимы. Помните, что вы не хотите получить больше глубины резкости, чем вам нужно.
- Если ни одна из моделей не подходит для вашего приложения, используйте собранную информацию для уточнения своих требований.
- Вернитесь на рынок и найдите одну или две модели, отвечающие этим новым требованиям. Перед тем, как сделать свой выбор, протестируйте еще раз в своей симуляции.
Использование такого процесса устраняет некоторые догадки при определении правильного количества осей. С каждым тестом в моделировании вы узнаете немного больше о том, что вам действительно нужно от позиционера для выполнения вашей задачи.
Сделайте выбор и работайте с ним
Как только вы определились с моделью, которая подходит для вашей задачи, вы можете двигаться дальше и более тщательно разработать приложение в симуляторе.

Откройте сохраненный проект с выбранным вами позиционером и доработайте его до полноценного приложения. Это позволит протестировать все аспекты задачи и подготовить приложение к легкой интеграции.
После того, как вы приобрели свой позиционер, вам не нужно беспокоиться о том, могли ли дополнительные оси помочь в выполнении задачи. Роботы очень гибкие, и обычно есть несколько способов выполнить одни и те же действия с одним роботом.
Если вы столкнетесь с какими-либо проблемами при развертывании робота, вы почти наверняка сможете найти решение, используя имеющееся у вас оборудование. В этом ценность принятия решений о покупке с использованием симулятора в качестве испытательного стенда.
Какие типы позиционеров вы рассматриваете? Сообщите нам в комментариях ниже или присоединитесь к обсуждению в LinkedIn, Twitter, Facebook, Instagram или на форуме RoboDK.
Промышленный робот
- Как робот достигает полной автономии?
- Насколько точной должна быть ваша система отслеживания активов?
- Сколько скрытых слоев и скрытых узлов нужно нейронной сети?
- Технический документ:как определить потенциал своего робота
- Как успешно интегрировать робототехнику в свое предприятие
- Сколько стоит автоматизация роботов?
- Центр виртуальных решений:как моделирование роботов помогает интеграции роботов?
- Как роботизированная машина обеспечивает рентабельность инвестиций с течением времени?
- Как я узнаю, что пора покупать робота?
- Сколько л.с. требуется гидравлическому насосу?