


10 полезных способов настроить интерфейс RoboDK
У каждого пользователя робота разные предпочтения в программировании. Вот 10 отличных способов настроить интерфейс RoboDK под себя.
Вы когда-нибудь пытались приготовить себе завтрак на чужой кухне?
Это кошмар, не так ли!?
Вы не знаете, где какие столовые приборы, у тостера запутанный набор кнопок, а в холодильнике ориентироваться сложнее, чем в горах Мордора.
Это именно то, что может быть похоже на то, когда вы пытаетесь использовать другое программное обеспечение для программирования, чем вы обычно используете. Интерфейс просто выглядит неправильно, и может потребоваться некоторое время, чтобы привыкнуть к нему.
Но с RoboDK вам не нужно идти на компромисс. Интерфейс чрезвычайно настраиваемый. Есть варианты изменить впечатляющий набор различных аспектов в соответствии с вашими потребностями.
Вот 10 очень полезных способов настроить интерфейс RoboDK в соответствии с вашими предпочтениями.
1. Перейти в темный режим
Много лет назад, когда я учился в университете, один из моих коллег рассказал мне о преимуществах перехода в «темный режим» при программировании.
В большинстве программных пакетов используется белый фон с черным текстом. Темный режим инвертирует все цвета, чтобы они были противоположными, то есть яркий текст на заднем фоне. Многие люди говорят, что темный режим снижает нагрузку на глаза (и были некоторые свидетельства того, что он уменьшал мерцание в старых ЭЛТ-мониторах).
Существуют противоречивые теории о том, действительно ли темный режим лучше для ваших глаз в наши дни с современными экранами — гораздо лучше регулярно давать глазам отдых при программировании, — но мы можем сказать точно одно:некоторым людям нравится темный режим.
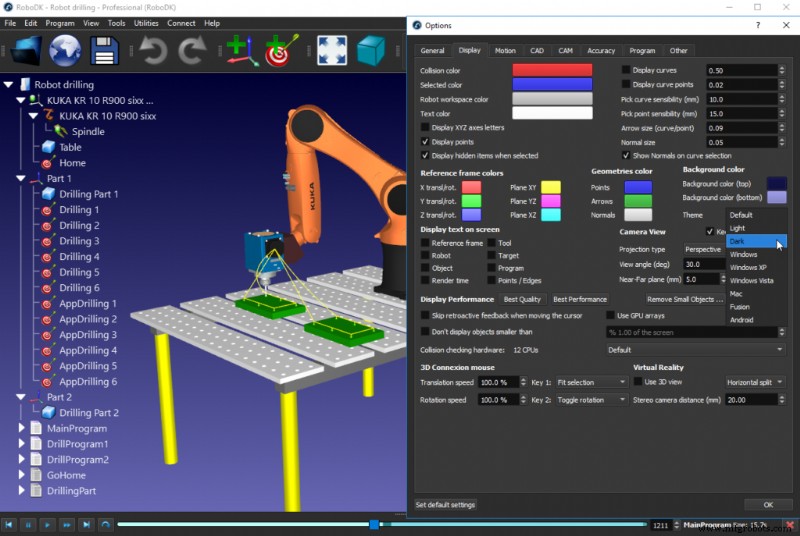
Если вы являетесь поклонником темного режима, RoboDK теперь будет активировать его автоматически, когда вы настроите свою ОС на темный режим. Вы также можете настроить это в параметрах отображения (выберите Инструменты> окно «Параметры»> вкладка «Отображение»). ).
Для OLED-дисплеев (но не ЖК-дисплеев) темный режим также может снизить энергопотребление экрана, что очень удобно, если вы используете RoboDK с питанием от аккумулятора.
2. Выбрать все цвета
Даже если вы не используете темный режим, вы можете изменить почти все цвета в RoboDK по своему усмотрению.
Цвета, которые вы можете изменить, включают:цвет столкновения, цвет текста, цвет точек, цвет фона, цвета опорной рамки и цвет выбранного элемента.
Все это можно изменить с помощью Инструменты> Окно параметров> вкладка "Отображение". .
3. Подберите свой любимый режим мыши
Как пользователь различных программ 3D-графики, я знаю, как это раздражает, когда вы переключаетесь на новую программу, а режим мыши другой. Внезапно верх становится низом, а низ становится верхом, функция колесика мыши меняется, а функции кнопок меняются местами.
RoboDK позволяет изменить режим мыши на любой другой через меню "Инструменты"> окно "Параметры"> вкладка "Общие". .
4. Автоматическое сопоставление вашего пакета CAD/CAM
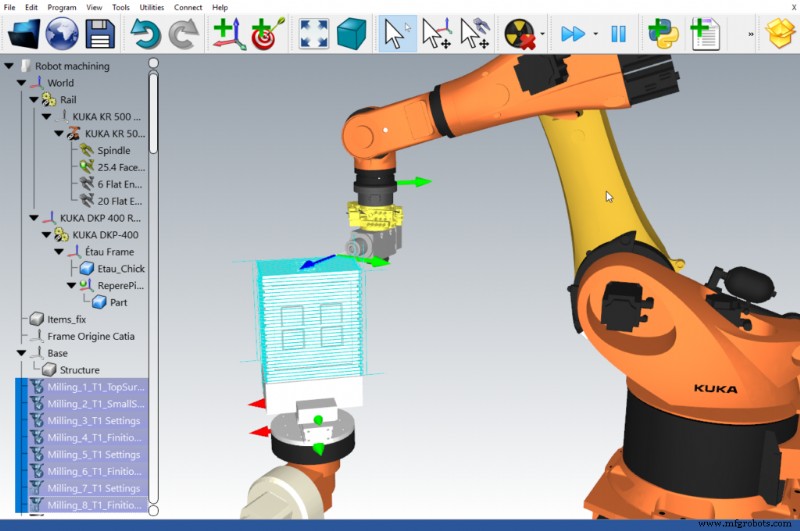
Если вы интегрировали свой любимый пакет CAD/CAM в RoboDK с помощью одного из наших плагинов, вы можете заставить RoboDK автоматически соответствовать визуальному стилю и режиму мыши для этой программы.
Например, если вы используете подключаемый модуль SolidWorks, вы можете установить «тему SolidWorks» через меню подключаемого модуля.
5. Изменить язык
Всегда легче ориентироваться в новой программе, если меню написано на вашем родном языке.
В RoboDK вы можете легко изменить язык через меню Инструменты> Язык.
На момент написания он содержит поддержку 16 наиболее распространенных языков. Не все языки переведены полностью, но основные функции представлены.
6. Переключить перспективу
Программы, использующие 3D-графику, страдают от интересной проблемы. Иногда вы хотите видеть объекты, как в реальном мире (с эффектом реалистичной перспективы). В других случаях вам нужно, чтобы вид более точно отражал размеры, даже если модель выглядит менее реалистично.
Вы можете переключаться между двумя представлениями (перспективным и ортогональным) через меню "Инструменты"> окно "Параметры"> вкладку "Отображение".
7. Переключить числовой формат
Все страны мира можно разделить на две группы:те, кто использует точку (.) для разделения десятичных чисел, и те, кто использует запятую (,).
Например:
- В Японии числа записываются в следующей форме: 1 234 567,89. — Эта форма используется примерно в 41 % стран мира.
- В Швеции числа записываются в такой форме:1 234 567,89. — Эту форму используют около 55% стран мира.
- Наконец, в Канаде числа записываются в обеих формах в зависимости от контекста. — Так обстоит дело примерно в 4% стран мира.
Вы можете изменить языковой стандарт номера RoboDK через меню "Инструменты"> окно "Параметры"> вкладку "Общие".
8. Установить размер и стиль дерева
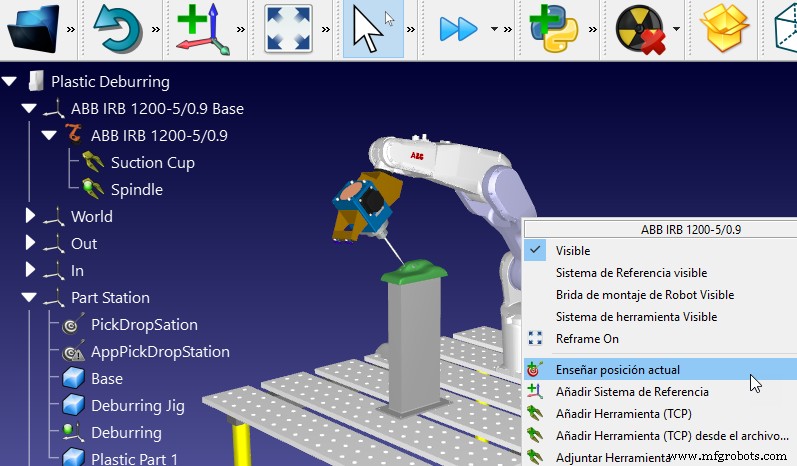
Дерево программы видно в левой части окна RoboDK. Он содержит все объекты и программные инструкции для текущего моделирования.
Иногда вам может понадобиться уменьшить масштаб дерева программы, чтобы получить более полное представление обо всех его элементах. В других случаях вам может потребоваться снова увеличить масштаб.
Вы можете изменить размер дерева программы, удерживая нажатой клавишу Ctrl ключ и вращение колеса мыши.
Вы также можете изменить фон дерева с прозрачного на закрепленный и наоборот, выбрав меню «Вид»> «Показать дерево внутри окна».
9. Оптимизация для скорости или производительности
RoboDK неплохо работает на слабых компьютерах. Однако вы можете изменить некоторые параметры отображения, чтобы уменьшить вычислительную нагрузку.
Существует 3 параметра, влияющих на производительность дисплея, которые можно найти в меню "Инструменты"> окно "Параметры"> вкладка "Экран". . Они позволяют настроить отображение на лучшее качество или лучшую производительность. Или вы можете использовать Simplify Object, чтобы уменьшить количество вершин в 3D-модели.
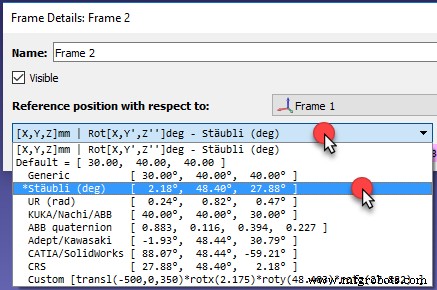
10. Выберите режим угла Эйлера
Углы Эйлера — это метод, используемый в робототехнике для представления местоположения и ориентации в пространстве. К сожалению, каждый производитель роботов и каждый пакет CAD/CAM используют несколько иное соглашение для углов Эйлера для представления положения системы координат (также известной как поза) относительно другой системы координат.
RoboDK поддерживает соглашения об углах Эйлера всех основных производителей роботов. Вы можете изменить соглашение о каждом используемом с помощью настроек каждой системы координат или настроек по умолчанию в меню "Инструменты"> окно "Параметры"> вкладка "Общие".
Чтобы получить полное представление об углах Эйлера, ознакомьтесь с нашей статьей Углы Эйлера для роботов:основное пособие.
Какими бы ни были ваши предпочтения, у RoboDK есть вариант для вас!
Как бы вы хотели настроить RoboDK? Сообщите нам в комментариях ниже или присоединитесь к обсуждению в LinkedIn, Twitter, Facebook, Instagram или на форуме RoboDK.
Промышленный робот