


Индивидуальная серво-развертка
Компоненты и расходные материалы
 |
| × | 1 | |||

| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Об этом проекте
Введение
У Solo отличная среда разработки, но отсутствует ввод-вывод. В настоящее время порт для аксессуаров поддерживает CAN, Mavlink Serial для Pixhawk и USB для Sololink (imx6). Используя Arduino и Firmata, можно добавить настраиваемые датчики, управляющие сервоприводы, мигающие светодиоды или любую другую функцию Arduino.
Из этого туториала Вы узнаете, как использовать Arduino с Solo для управления сервоприводом.
Программное обеспечение:
- Одиночное обновление 1.2.0 или новее
- IDE Arduino
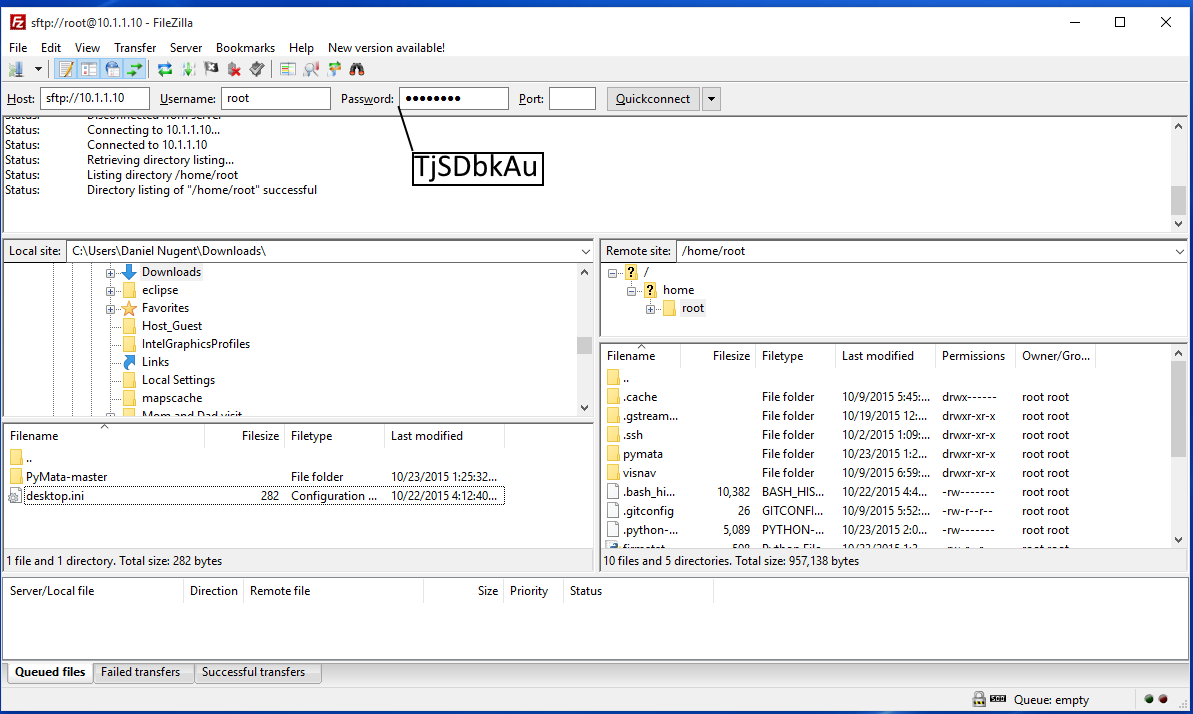
- Filezilla
- Putty или любой другой клиент SSH
Шаг 1. Загрузите хост Firmata в Arduino Uno
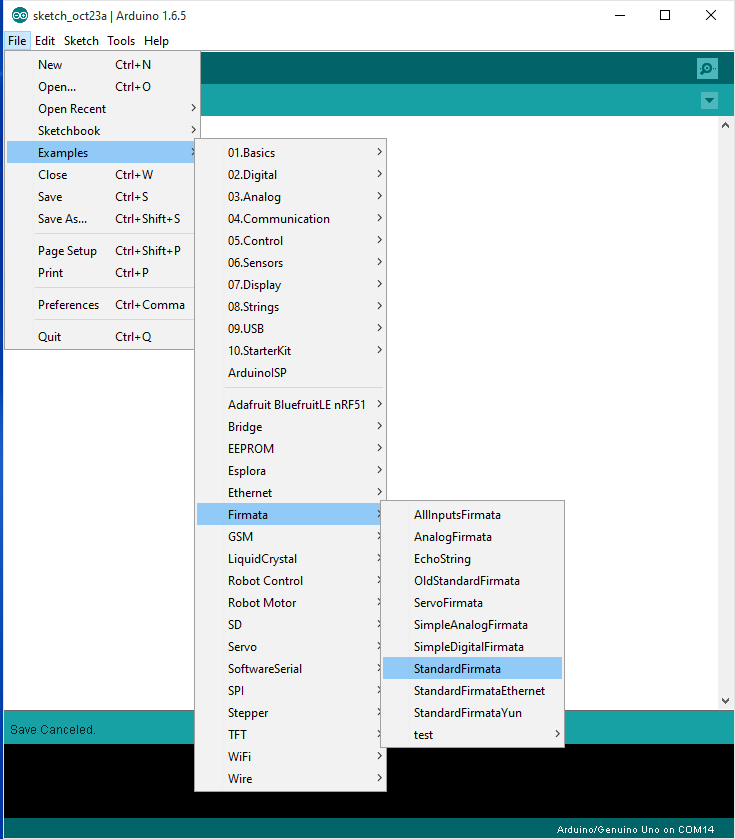
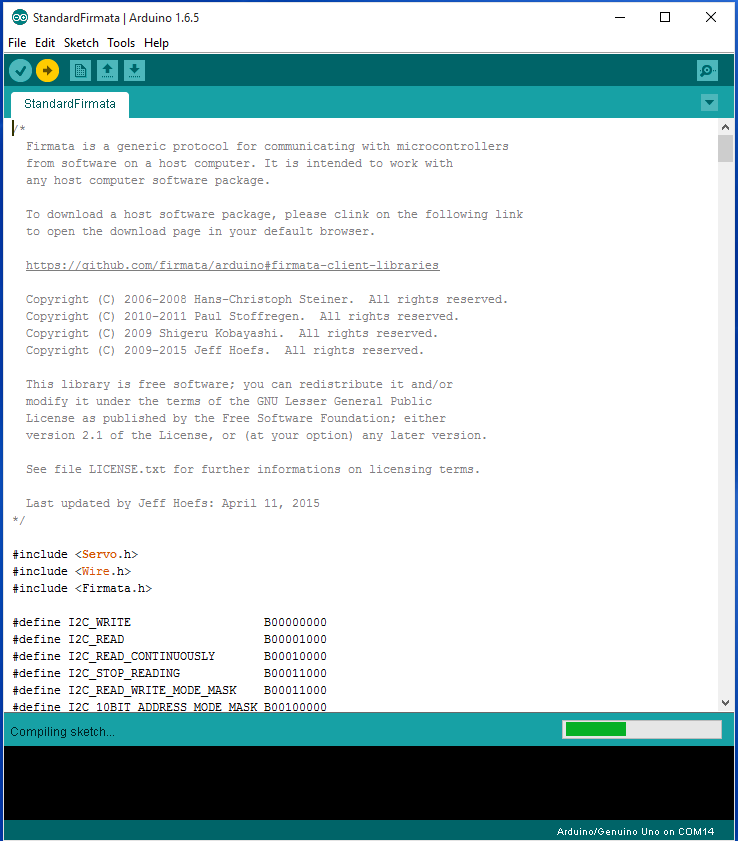
Откройте StandardFirmata на вкладке примеров. Выберите плату и порт. Загрузить!
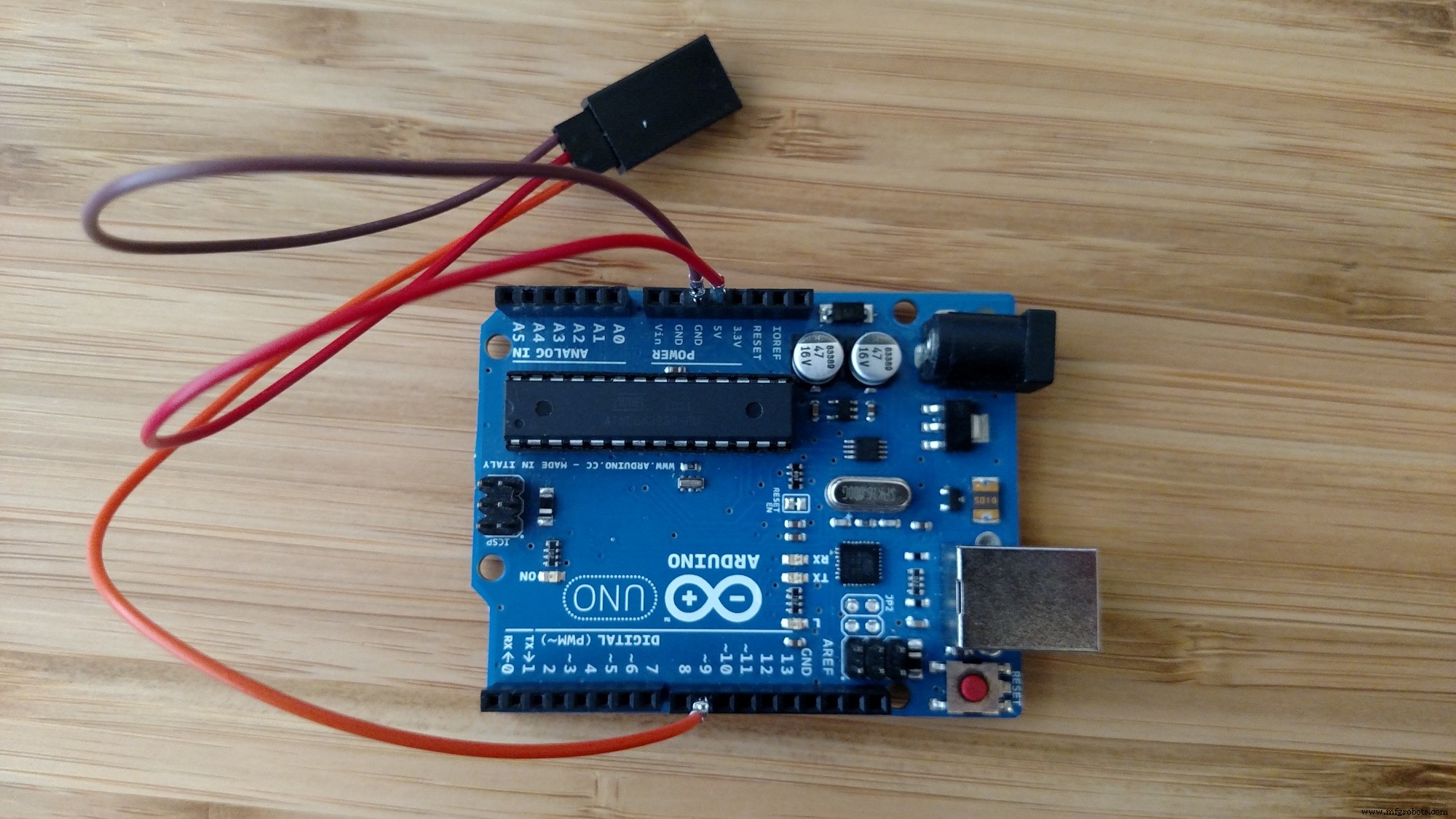
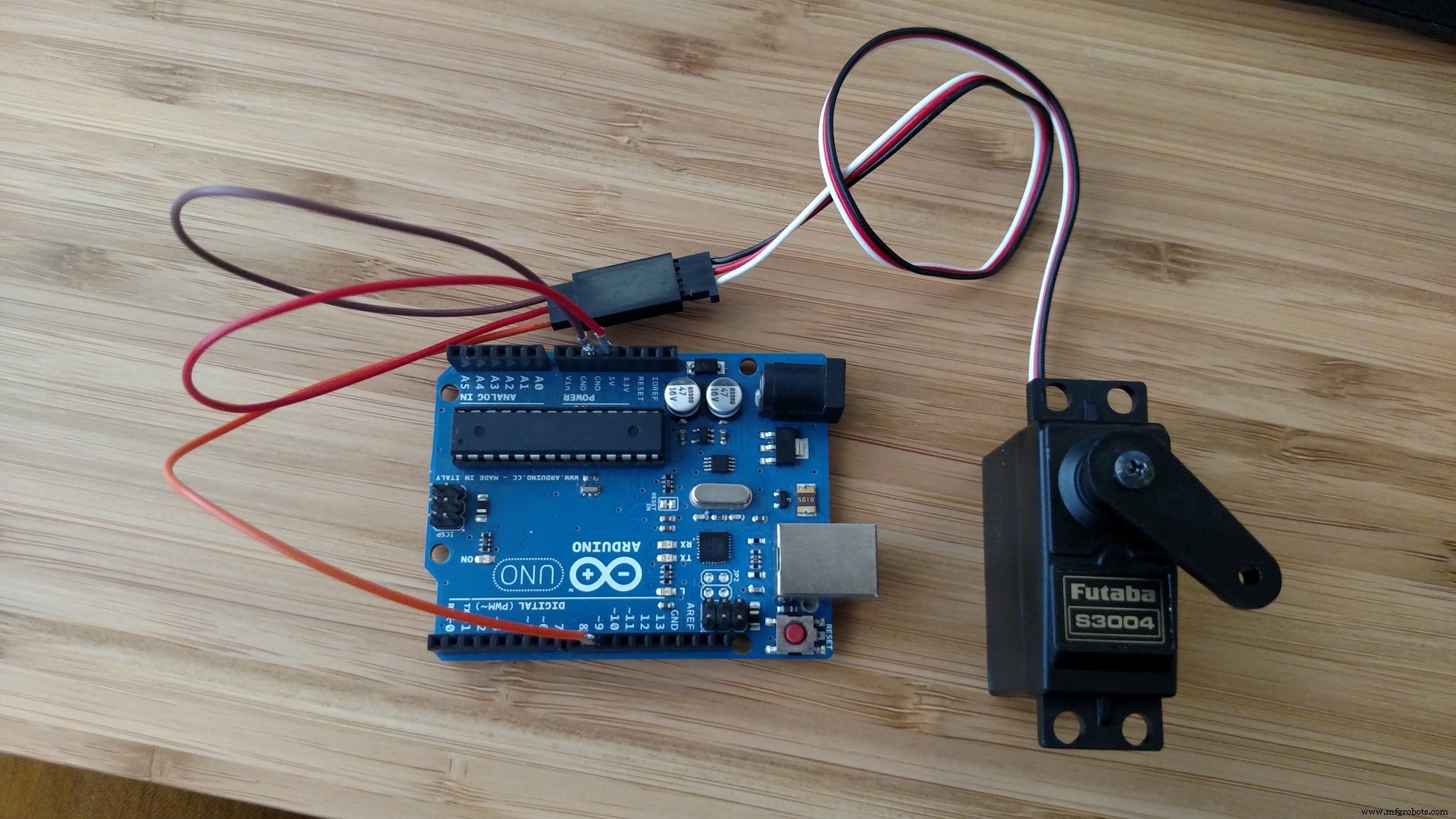
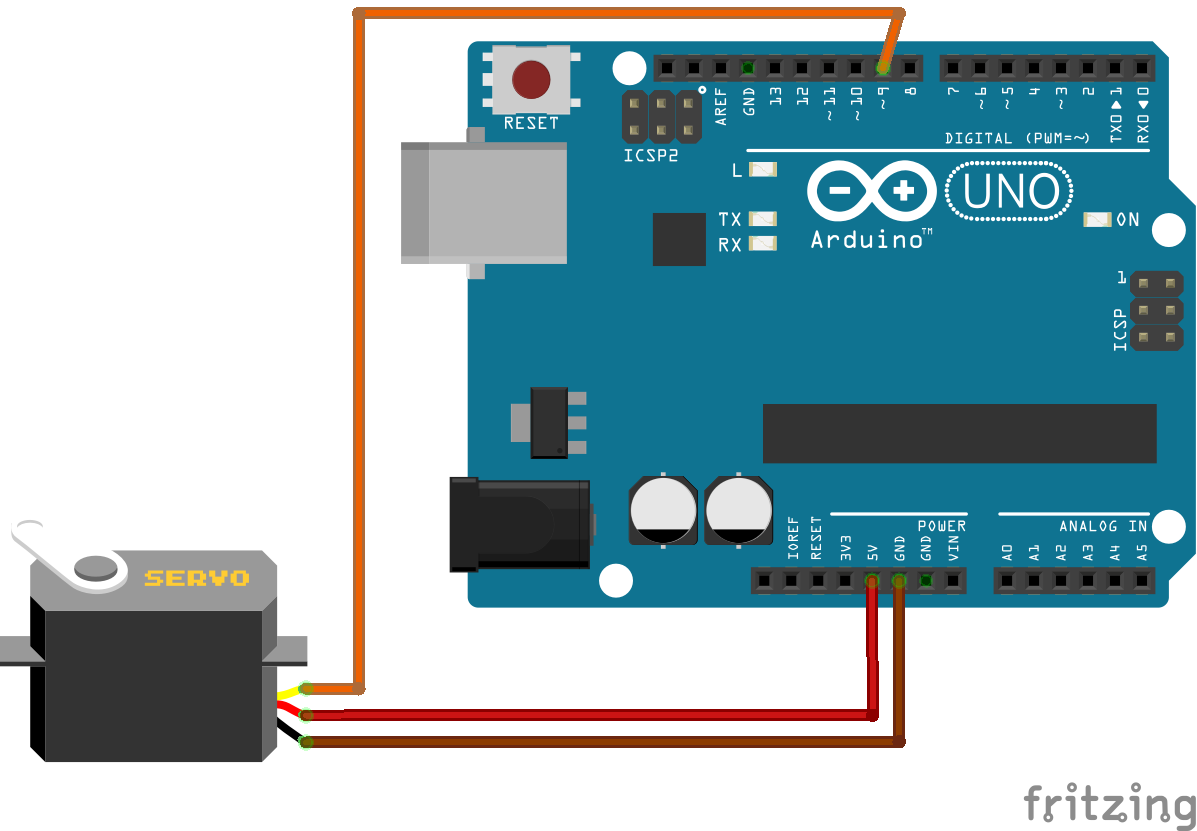
Шаг 2. Настройка оборудования
Детали



Примечание:коммутационная плата на данный момент не продается. Пожалуйста, обратитесь сюда
Сборка



Включение

Шаг 2. Загрузите pyMata и код
pyMata
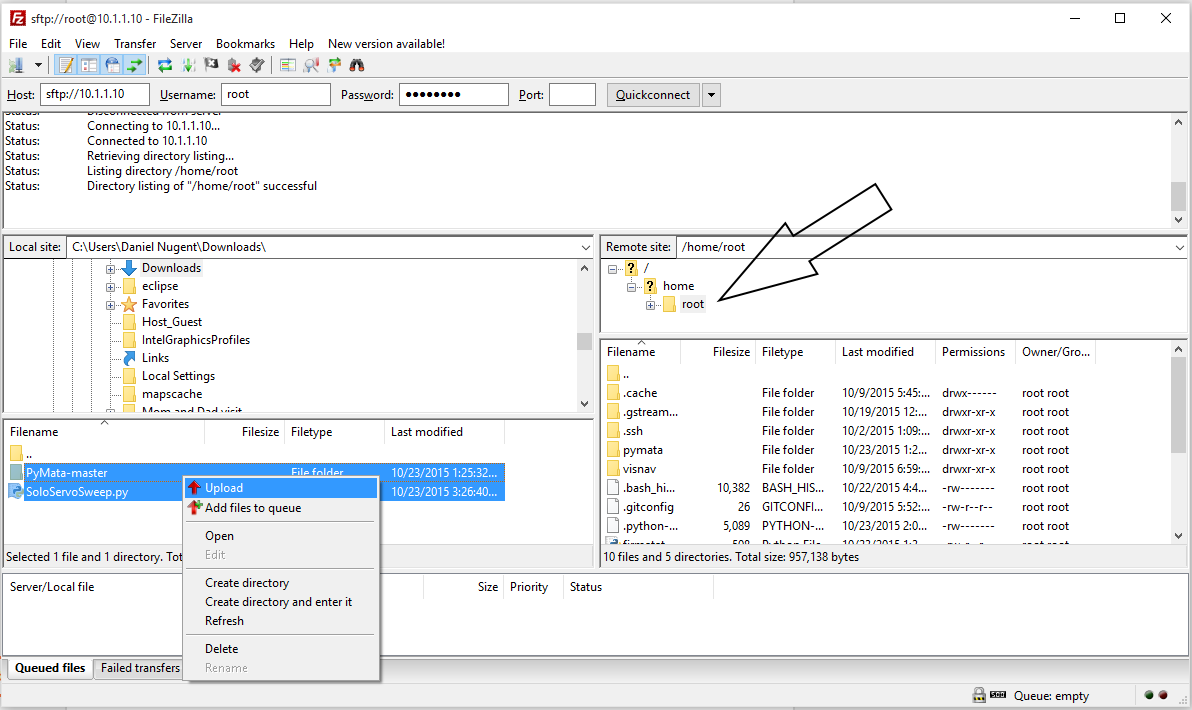
SoloServoSweep.pyШаг 3. Перенесите файлы в Solo
- Подключитесь к сети Wi-Fi вашего Solo!
Шаг 4:SSH в Solo
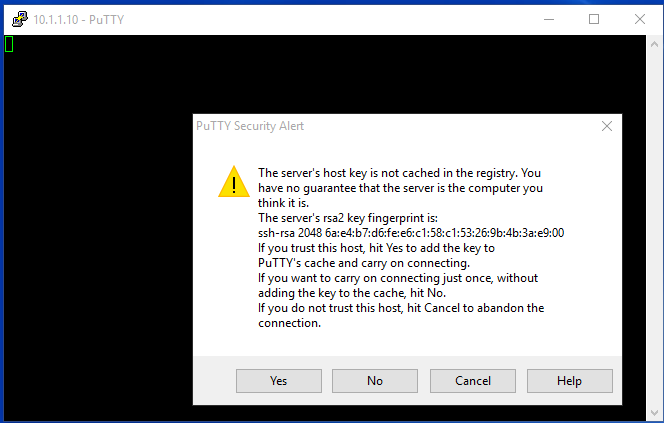
SSH в Solo с помощью SSH-клиента вашей ОС. Для Windows мы будем использовать Putty.
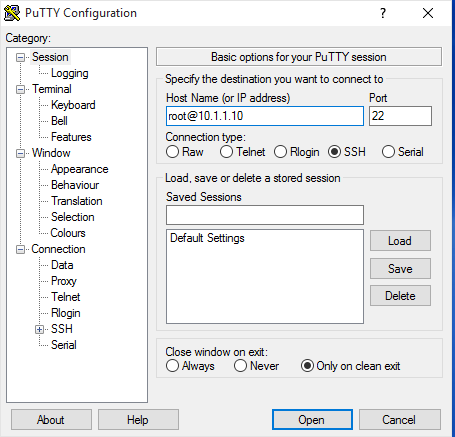
Убедитесь, что вы все еще подключены к сети Wi-Fi Solo!
Подробнее см. в подписях к фотографиям
Шаг 5. Установите pyMata
Выполните эту команду в сеансе SSH:
Это должен быть ваш результат
Шаг 7. Запустите пример
Пока ваш сеанс ssh еще открыт, выполните:
Код
- SoloServoSweep.py
SoloServoSweep.py Python
Управляйте сервоприводом на python из Solo из PyMata.pymata import PyMataimport timeimport sysSERVO_MOTOR =9 # сервопривод, подключенный к этому выводуEND =170 # Максимальный ход сервопривода # создайте экземплярную панель PyMata =PyMata ("/ dev / ttyACM0") # настройте вывод as servoboard.servo_config (SERVO_MOTOR) try:while True:for i in range (0, END):# развернуть board.analog_write (SERVO_MOTOR, i) time.sleep (.015) for i in range (END, 0, - 1):# развернуть board.analog_write (SERVO_MOTOR, i) time.sleep (.015) за исключением KeyboardInterrupt:board.close () sys.exit () Изготовленные на заказ детали и корпуса
Доска для обсуждения соло
Коммутационная плата для порта аксессуаров 3DR Solo https://github.com/3drobotics/Pixhawk_OS_Hardware/tree/master/Accessory_Breakout_X1Схема
Производственный процесс