


4-колесный робот, созданный с помощью Arduino, управляемый с помощью Dabble
Компоненты и расходные материалы
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 4 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Приложения и онлайн-сервисы
 |
| |||
|
Об этом проекте
Еще один проект, еще одна нестандартная идея для подарков! Представляем вам 4-колесного робота, управляемого Dabble - простого и увлекательного в сборке и легкого в управлении робота, которым можно управлять через Bluetooth с помощью мобильного приложения Dabble, разработанного нами самостоятельно. Все, что вам нужно для создания вашего робота, - это плата Arduino Uno, шасси, колеса, валы двигателей и другие аксессуары и инструменты. Чтобы управлять им, вам необходимо установить Dabble из Google Play и связать его с Bluetooth; и ваш робот готов к работе!
Какой лучший способ завершить год с тем же духом DIYing, с которым он начался, верно? И так, чего же ты ждешь!
Итак, приступим!
Шаг 1. Вещи, которые вам понадобятся
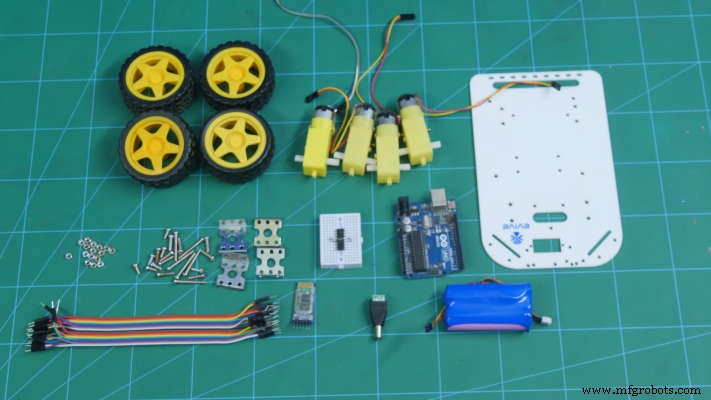
- Плата Arduino Uno
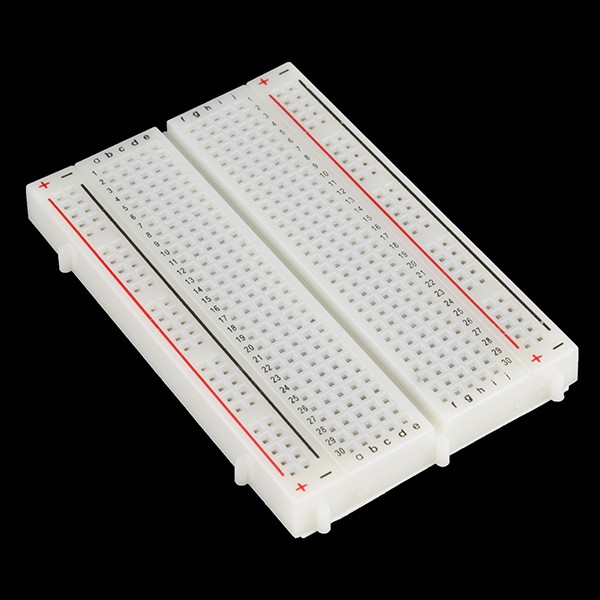
- Макет
- Шасси
- Крепления для двигателей
- Двигатели постоянного тока
- Колесо
- Драйвер двигателя
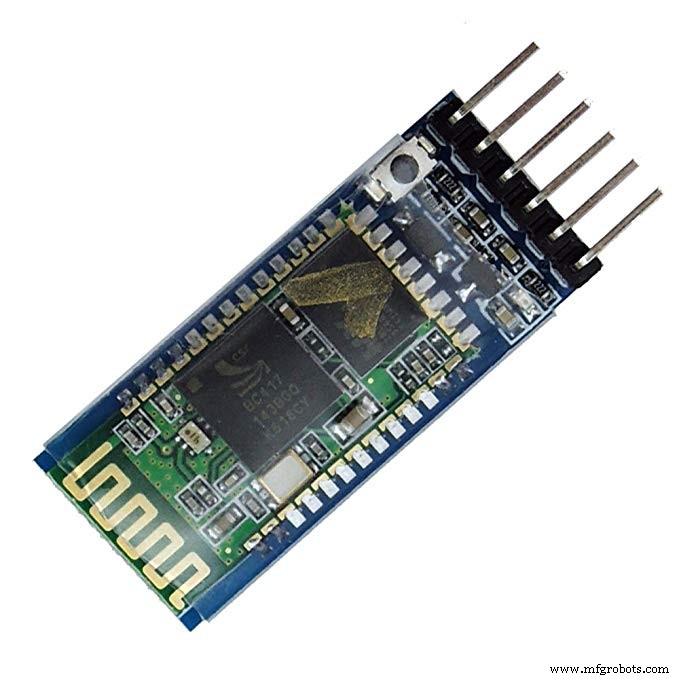
- Модуль Bluetooth HC05
- Клеммная колодка постоянного тока
- Аккумулятор
- Кабели-перемычки
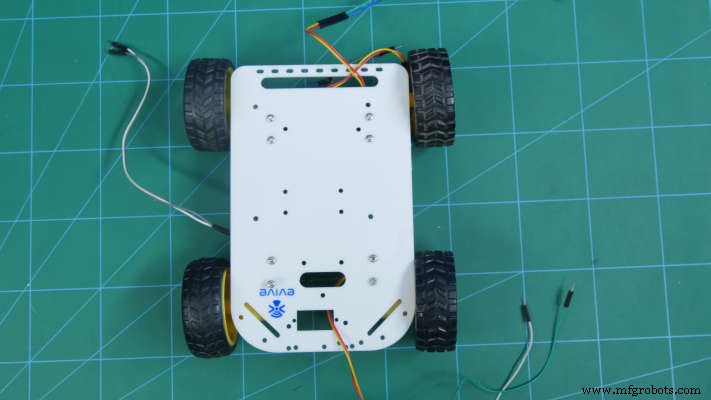
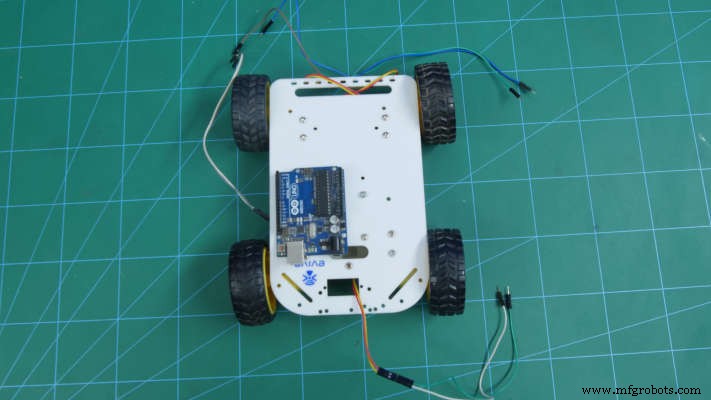
Шаг 2. Изготовление тела
Во-первых, мы приступим к изготовлению корпуса 4-х колесного робота.
Возьмите шасси и переверните его вверх дном.

На это шасси установите 4 крепления двигателя с помощью болтов и гаек M3.
Закрепите двигатели постоянного тока и закрепите их на опорах двигателя с помощью гаек и болтов M2.
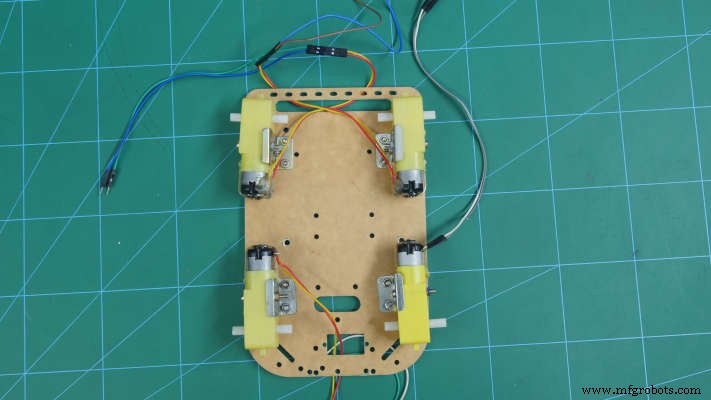
Присоедините колеса к каждому валу двигателя постоянного тока.

Переверните сборку, чтобы создать ваше тело.
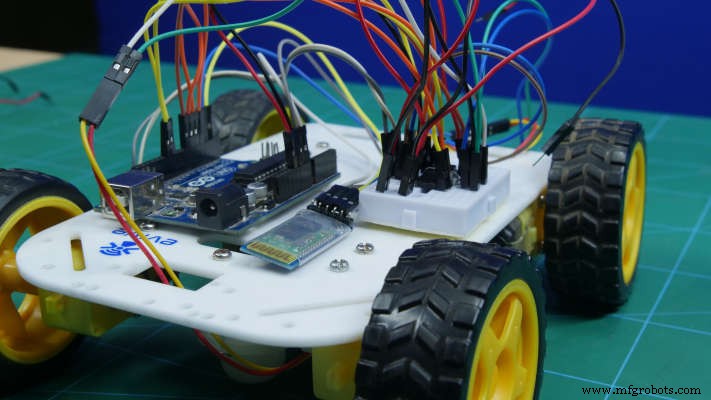
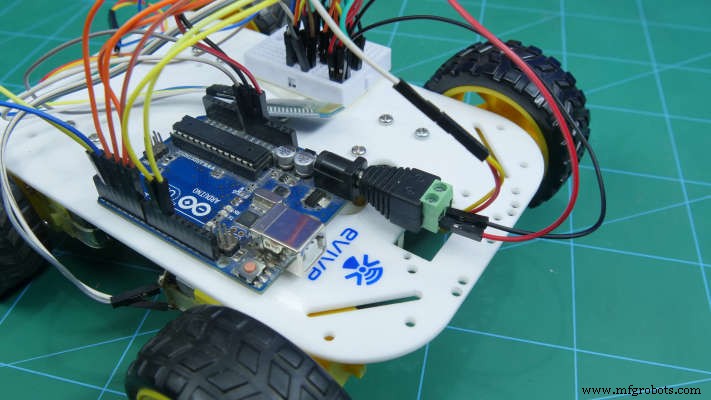
Шаг 3. Добавление мозга
Мы собираемся использовать микроконтроллер Arduino Uno.

Мы собираемся выполнить все подключения на нем, но мы также будем использовать макет для подключения.
Шаг 4:Подключение и использование драйвера двигателя
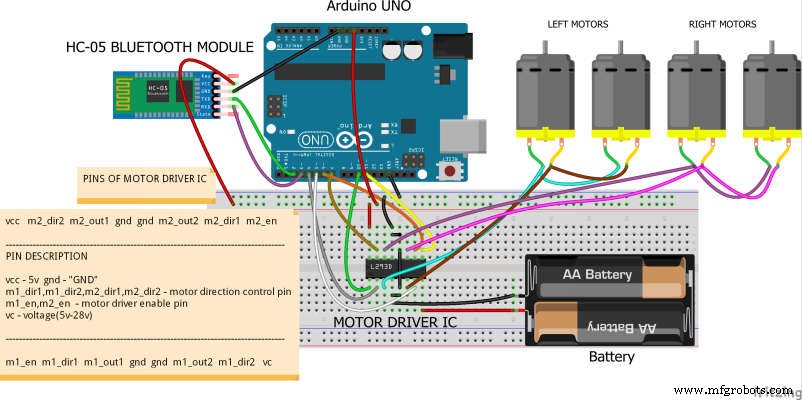
Выполните подключение, как показано на рисунке ниже.
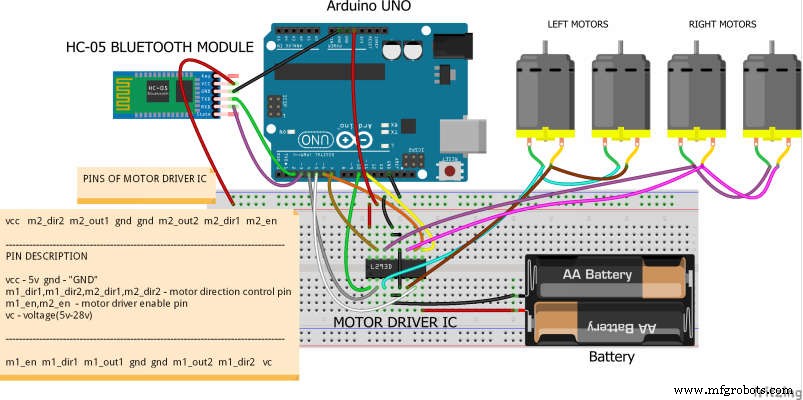
Мы собираемся использовать драйверы двигателей, потому что Arduino Uno не обеспечивает достаточной мощности для работы 4 двигателей. Таким образом, мы добавим драйвер двигателя, и мы сможем дать роботу необходимую энергию.
Два левых мотора подключены параллельно. Точно так же два правых двигателя тоже подключены параллельно. Подключения выполняются следующим образом:
- Включить контакты - цифровые контакты 10 и 11
- VCC - Arduino 5 В
- m1_dir1, m1_dir2, m2_dir1, m2_dir2 - цифровые выводы 4, 5, 6 и 7
- VC - внешняя батарея
- GND - GND Arduino и Battery Убедитесь, что мы соединили все провода GND вместе.
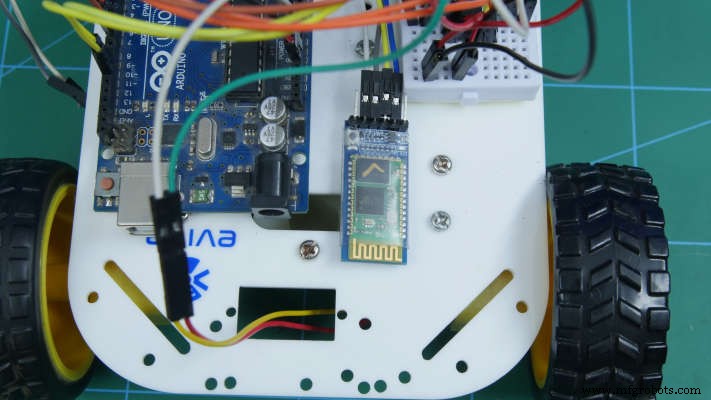
Шаг 5. Подключение смартфона
Нам нужно добавить модуль, который установит соединение между вашим роботом и приложением Dabble на смартфоне.
Мы берем модуль Bluetooth HC05. Подключите его, как показано на рисунке.
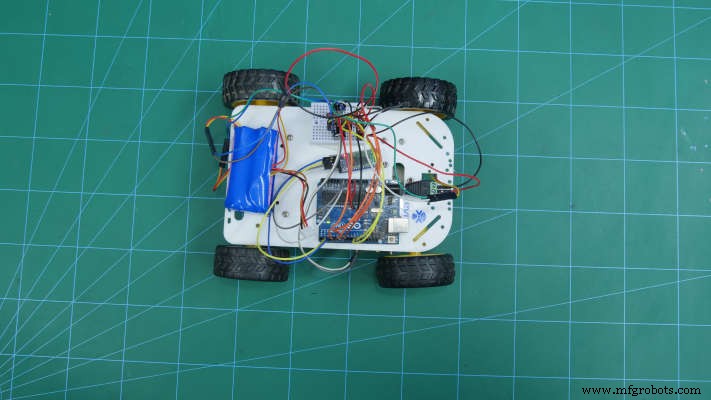
Шаг 6. Добавление батареи
Нам нужно будет добавить к нашему роботу дополнительный источник энергии. Кроме того, для подключения Arduino Uno к батарее мы будем использовать клеммную колодку постоянного тока или разъем постоянного тока.
Шаг 7. Код Arduino
Загрузите следующий код:
robot.ino
Шаг 8:Работа
Мы можем легко подключить нашего робота к нашему смартфону с помощью Dabble.
Перед работой с любым из модулей вам необходимо подключить Bluetooth, над которым вы работаете.
В приложении доступно множество модулей для других функций.
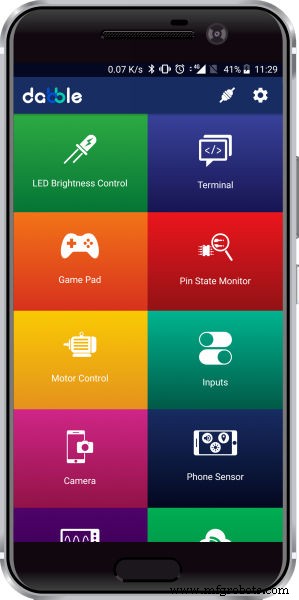
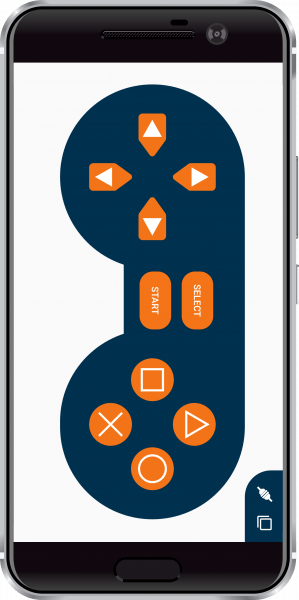
Сегодня мы будем работать с модулем геймпада.
И мы будем использовать левый набор кнопок:
- Вверх - двигаться вперед
- Вниз - назад.
- Влево - поверните налево
- Вправо - поверните направо
Шаг 9:Заключение
Теперь ваш четырехколесный робот, управляемый DIYDabble, готов к работе!
Psst! Просто чтобы вы знали, Dabble может делать гораздо больше, чем просто управлять роботами по беспроводной сети. Вы можете узнать об этом подробнее здесь!
Код
- robot.ino
- Библиотека Evive
robot.ino Arduino
/ * * * этот проект демонстрирует управление 4-колесным роботом Arduino с помощью приложения Dabble * мы будем использовать модуль геймпада в цифровом режиме * для получения дополнительной информации о геймпаде перейдите на https://thestempedia.com/docs/dabble/game- pad-module / * * в этом проекте мы будем использовать модуль bluetooth HC-05 * для arduino "UNO" используйте скорость модуля bluetooth ниже 38400 * * соединение модуля bluetooth с arduino * * модуль bluetooth HC-05 ----> arduino "UNO" * * Tx ----> 2 * Rx ----> 3 * * Написано Пунитом Чоталией, STEMpedia * 16 января 2019 г. * * /// Чтобы включить модуль GamePad в программу Arduino, вы должны // включить следующий заголовок:#define CUSTOM_SETTINGS #define INCLUDE_GAMEPAD_MODULE // включить библиотеку приложений Dabble #include#define motor1_en 10 // пин включения двигателя 1 #define motor2_en 11 // пин включения двигателя 2 # define motor1_dir1 4 // мотор 1 input1 (InputA) #define motor1_dir2 5 // мотор 1 input2 (InputA) #define motor2_dir1 6 // мотор 2 input1 (InputB) #define mo tor2_dir2 7 // двигатель 2 input2 (InputB) void setup () {// поместите сюда свой установочный код, чтобы запустить его один раз:Serial.begin (9600); // запускаем последовательную связь со скоростью 9600 бод Dabble.begin (38400); // Введите скорость передачи модуля Bluetooth // ПРИМЕЧАНИЕ:для Arduino "UNO" используйте скорость модуля Bluetooth ниже 38400 для (unsigned int i =4; i <8; i ++) {pinMode (i, OUTPUT); // объявление входных контактов motor1 и motor2 как выходных} pinMode (motor1_en, OUTPUT); // объявление разрешающих контактов двигателя как выход pinMode (motor2_en, OUTPUT); } void loop () {// поместите сюда ваш основной код для повторного запуска:Dabble.processInput (); // Чтобы обновить данные, полученные arduino UNO из мобильного приложения, вы должны использовать следующую строку кода if (GamePad.isUpPressed ()) // если на геймпаде нажата кнопка UP, переместите робота вперед {Serial.print ("ВВЕРХ"); вперед(); } else if (GamePad.isDownPressed ()) // если на геймпаде нажать DOWN, переместить робота назад {Serial.print ("DOWN"); назад (); } else if (GamePad.isLeftPressed ()) // если на геймпаде нажать ВЛЕВО, переместите робота ВЛЕВО {Serial.print ("Left"); левый(); } else if (GamePad.isRightPressed ()) // если на геймпаде нажать ВПРАВО, то переместите робота ВПРАВО {Serial.print ("Right"); правильно(); } else // остановка робота {Serial.println ("strop"); Останавливаться(); }} void forward () // функция для движения робота вперед {analogWrite (motor1_en, 255); analogWrite (motor2_en, 255); digitalWrite (motor1_dir1, HIGH); digitalWrite (motor1_dir2, LOW); digitalWrite (motor2_dir1, HIGH); digitalWrite (motor2_dir2, LOW); } void backward () // функция для обратного движения робота {analogWrite (motor1_en, 255); analogWrite (motor2_en, 255); digitalWrite (motor1_dir1, LOW); digitalWrite (motor1_dir2, HIGH); digitalWrite (motor2_dir1, LOW); digitalWrite (motor2_dir2, HIGH); } void left () // функция для движения робота влево {analogWrite (motor1_en, 255); analogWrite (motor2_en, 255); digitalWrite (motor1_dir1, LOW); digitalWrite (motor1_dir2, HIGH); digitalWrite (motor2_dir1, HIGH); digitalWrite (motor2_dir2, LOW); } void right () // функция для движения робота вправо {analogWrite (motor1_en, 255); analogWrite (motor2_en, 255); digitalWrite (motor1_dir1, HIGH); digitalWrite (motor1_dir2, LOW); digitalWrite (motor2_dir1, LOW); digitalWrite (motor2_dir2, HIGH); } void Stop () // // функция без движения {analogWrite (motor1_en, 0); analogWrite (motor2_en, 0); digitalWrite (motor1_dir1, LOW); digitalWrite (motor1_dir2, LOW); digitalWrite (motor2_dir1, LOW); digitalWrite (motor2_dir2, LOW); }
Библиотека evive C / C ++
Нет предварительного просмотра (только загрузка).
Схема
Производственный процесс
- Робот Raspberry Pi, управляемый через Bluetooth
- Создайте своего робота для видеостриминга, управляемого через Интернет, с помощью Arduino и Raspberry Pi
- Робот, управляемый Wi-Fi и использующий Raspberry Pi
- Затемнение света с ШИМ с помощью кнопки
- Игрушка под управлением Android с использованием Raspberry Motor Shield
- Робот с сервомотором избегает препятствий
- Робот-последователь линии
- Роботизированная рука, управляемая нунчук (с Arduino)
- Робот, управляемый речью
- MobBob:самостоятельный робот Arduino, управляемый смартфоном Android