


Усовершенствованный ручной гуманоидный робот с открытым исходным кодом MIA-1!
Компоненты и расходные материалы
 |
| × | 1 | |||
| × | 8 | ||||
 |
| × | 1 |
Приложения и онлайн-сервисы
 |
|
Об этом проекте
Всем привет, сегодня я покажу, как я создал робота MIA-1, который не только продвинут и уникален, но и имеет открытый исходный код, и его можно сделать без 3D-печати! Да, вы поняли, этот робот полностью ручной работы. И открытый исходный код означает - вы получаете коды и все детали бесплатно , вы тоже можете сделать этого робота, если хотите.
Здесь мы видим только ее речь, но она может делать еще много всего!
Вот что она умеет:
- Могу вас выслушать и перезвонить.
- Может видеть и узнавать вас с помощью камеры своего левого глаза.
- Может обнаруживать движение и делать снимки.
- Имеет графический интерфейс с сенсорным ЖК-дисплеем для управления ею.
- Показывает изображения на своем ЖК-дисплее.
- Загрузите изображения и покажите на своем экране.
- Может нацеливаться на объекты с помощью лазерной указки на правой руке.
- Шевелит руками во время разговора.
- Стоит на ногах без посторонней помощи
- Еще она умеет поклоняться (посмотрите видео)
- И многое другое!
Расходные материалы:
Для создания этого робота я использовал все, что есть в нашем местном магазине.
Микроконтроллеры + компьютеры (мозг):
- Arduino Mega (для управления серводвигателями)
- Полноценный компьютер (вы можете использовать Raspberry Pi, но изначально я использовал свой ноутбук как ее мозг)
Серводвигатели:
МИА-1 имеет 13 степеней свободы.
- Двухосные серводвигатели LDX227 8x
- Серводвигатели MG996r / MG996, 3 шт.
- На фиг. 5 используется сервопривод Micro SG90.
Обратите внимание, что я добавил роботизированный коготь, и в нем используется еще один серводвигатель MG996r.
И перемычки и т. Д.
Видение:
Для обработки изображений, например для фотосъемки, распознавания лиц и т. Д., Я использовал USB-камеру . .
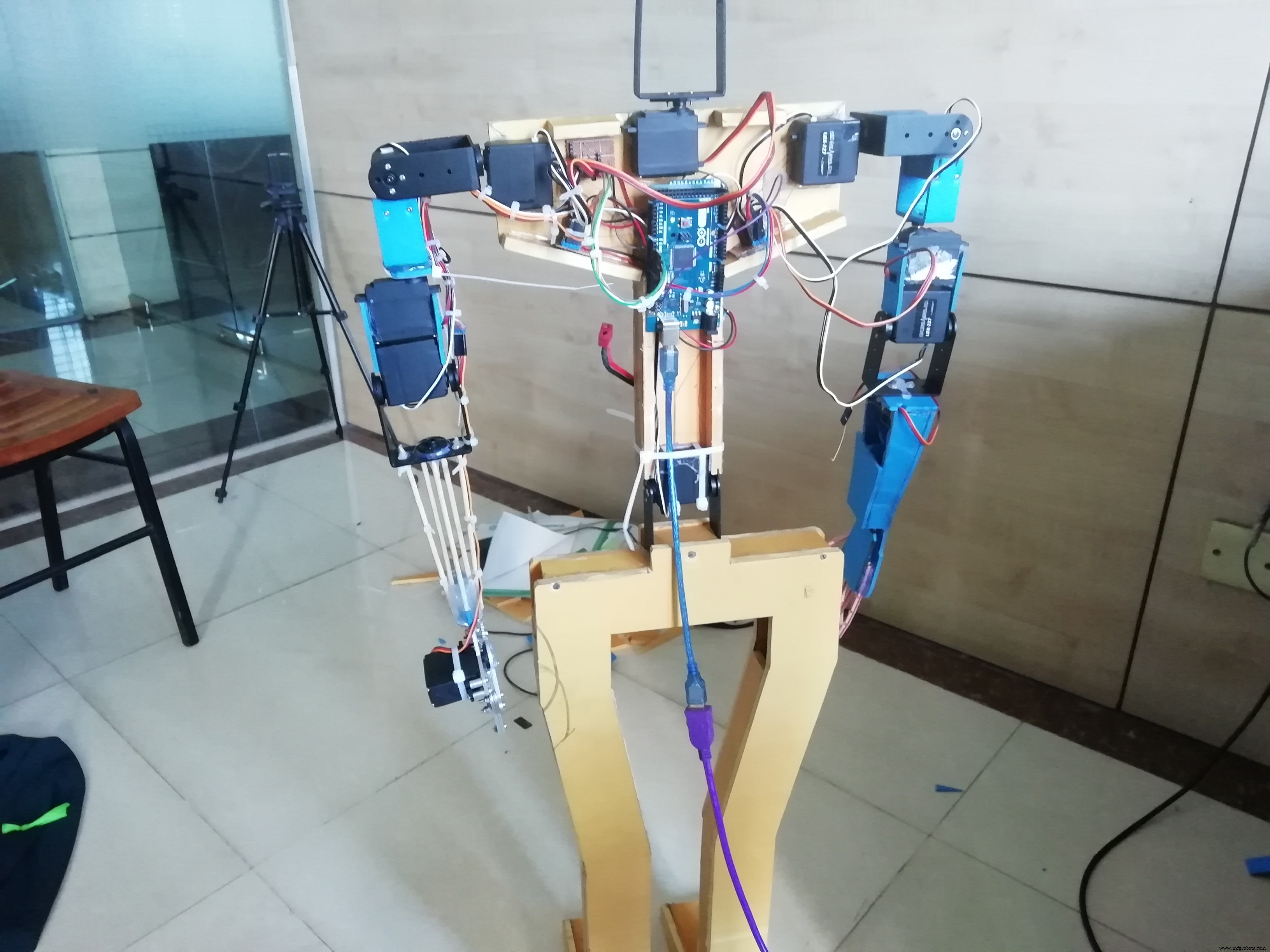
Шаг 1. Схема корпуса и двигателя
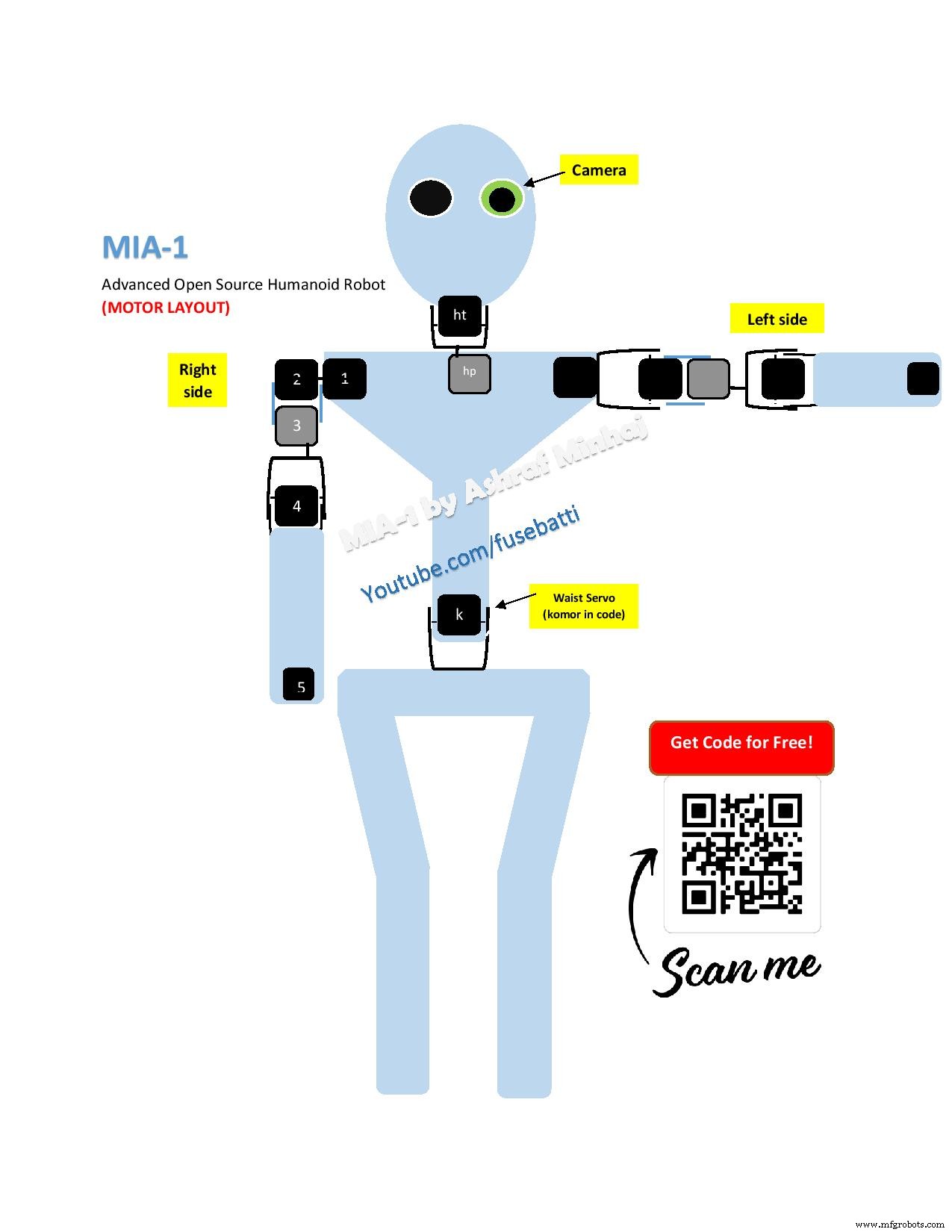

Корпус изготовлен из листа ПВХ, разные части прикрепляются с помощью горячего клея и винты (см. картинку). Я разрезал лист ПВХ с помощью ножа для резки (будьте очень осторожны! Вместо этого не порежьте пальцы !!). На изображениях один и два вы можете увидеть схему сервопривода. Когда я делал девочку-робота, я придал ей женскую форму и фигуру.
Серворазъемы изготовлены из тонких листов ПВХ, так как они хорошо изгибаются.
Голова сделана из воздушного шарика, в него вдувается воздух (см. Рисунок), добавляются небольшие влажные бумажки и затем высушивается. После добавления 8 слоев он стал прочным и устойчивым.
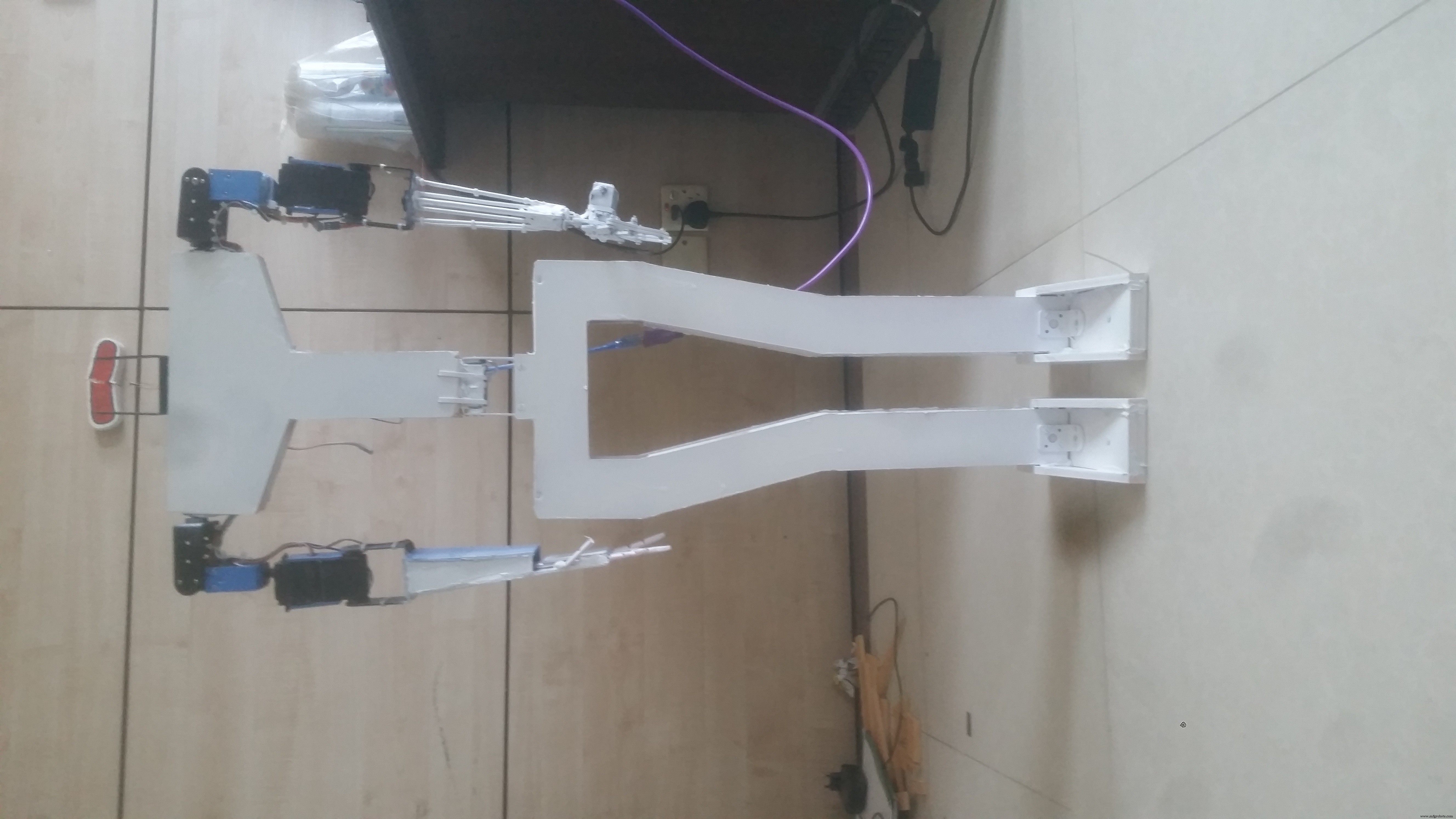
Затем просто покрасьте его (все тело) в белый цвет с помощью спрея.
Оказалось, что дизайн настолько удивительно сбалансирован, и она (MIA-1) стоит прямо на двух ногах от нее !!
Добавление дисплея:
После этого просто использовала несколько шурупов и горячий клей, чтобы закрепить ЖК-дисплей на груди (последнее фото).
Шаг 2:принципиальная схема
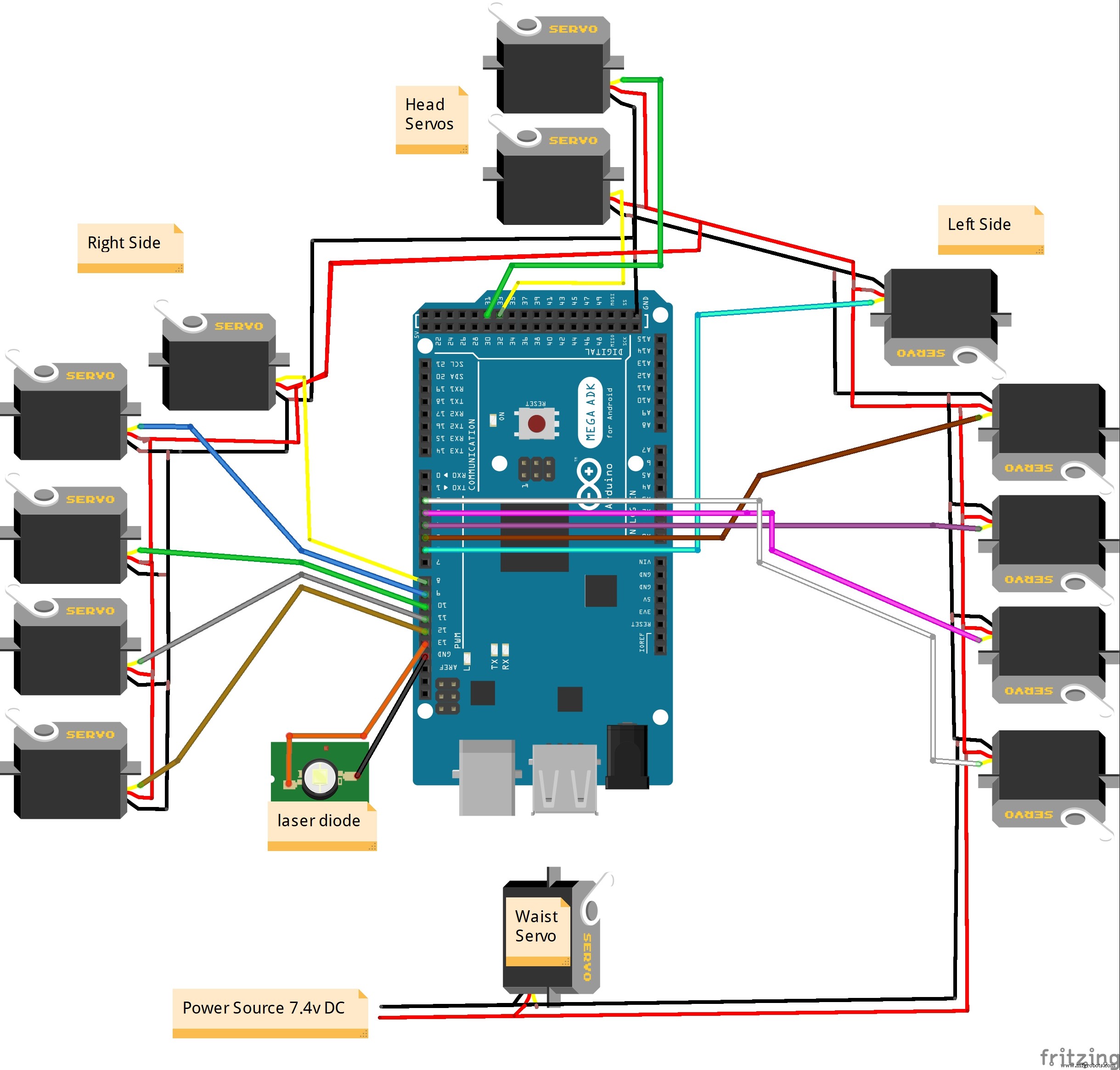
Принципиальная схема выглядит сложной, но это не так. Я нарисовал схему в виде схемы двигателя на корпусе, чтобы вам было легче понять ее. Убедитесь, что у вас есть земля. Arduino получает питание от компьютера через USB-кабель. Есть лазерный диод, который позволяет MIA нацеливаться на объекты, питается от вывода 13 (вывод светодиода) Arduino.
Как видите, все моторы и сама ардуино находятся на тыльной стороне корпуса. Я также вставил все кабели сзади. Купил удлиненный USB-кабель, чтобы его можно было подключить к компьютеру.
Шаг 3. КОД
Как вы знаете, я использовал мега Arduino. Arduino Mega управляет серводвигателями, двигатели предварительно запрограммированы. Получите код двигателей здесь. Обратите внимание на положения сервоприводов по умолчанию, при создании робота сохраняйте их. Просто включите двигатели с помощью Arduino, не создавая корпус, и серводвигатели достигнут положения по умолчанию (положение по умолчанию ниже)
/ * положение сервоприводов по умолчанию / в режиме ожидания * /
komor.write (4); # сервопривод талии
left1.write (120);
rFinger.write (0);
servo1.write (55);
clawOpen ();
rightStandBy ();
leftStandBy ();
headTilt.write (134);
headPan.write (90); Код управления двигателем состоит из более чем 750 строк (будьте осторожны при редактировании).
Основная обработка выполняется с помощью скрипта python3.
Python имеет библиотеку pySerial, которая взаимодействует с Arduino через последовательный порт. Обратите внимание на «COM-ПОРТ».
# Подключиться к плате драйвера двигателя MIA через последовательный порт
попробуйте:
mia =serial.Serial ("COM28", 9600)
кроме:
pass Вам также необходимо установить эти библиотеки через пакет
"" "импортировать необходимые библиотеки" ""
# импортировать запросы # для отправки / получения запросов
импортировать pyttsx3 # автономный текст в речь
импортировать распознавание речи как sr # говорить в текст (для работы требуется интернет)
время импорта
из случайного импорта randint # библиотеки случайного целочисленного выбора
import tkinter #tkinter gui library
из tkinter import Tk, Button, Label, Tk # импортировать необходимые вещи
import serial #serial library for serial communication over USB
from PIL import Image #fro показывает изображение
import cv2 #Computer Vision library
import wikipedia # чтобы получить данные прямо из Википедии С помощью pip install все просто. Для opencv введите в командной строке:
pip install opencv-contrib-python GUI (графический интерфейс пользователя), который вы видите, разработан с использованием tkinter. Для этой и любых других библиотек вы можете установить с помощью этой команды:
pip install имя_библиотеки тогда он будет установлен.
Также обратите внимание, если вы используете веб-камеру, она, скорее всего, обозначена как 1
cap =cv2.VideoCapture (1) #camera И если вы хотите узнать больше о том, как этот робот на самом деле отвечает, прочтите это руководство.
Код MIA-1 - это просто расширенная версия этого.
Когда командует arduino, компьютер посылает укус, arduino выполняет действия в соответствии с полученными укусами, таким образом, он выглядит движением Миа и разговаривает асинхронно.
mia.write (b'p ') #command to head up, then down
count_down (3)
response ("Улыбнитесь, пожалуйста", 100) Теперь, чтобы получить код, перейдите по ссылке ниже.
Загрузите код MIA-1 отсюда.
Шаг 4:питание и завершение
Я питал робота от липо-батареи 7,4 В. Сервоприводы LDX227 очень энергоемкие (но хорошего качества), поэтому убедитесь, что они всегда получают не менее 7,3 В. С другой стороны, серводвигатели MG996r дешевы, их можно легко повредить, убедитесь, что они не получают больше 7,8 В. Таким образом, максимальное напряжение питания для этого робота должно составлять от 7,4 до 7,8 вольт.
Удачного создания! Если вам нравится этот робот, обязательно поддержите, подписавшись на канал для более интересных проектов.
Код
Скачать полный код бесплатно
ashraf-minhaj / MIA-1-Open-Source-Humanoid-Roboth https://github.com/ashraf-minhaj/MIA-1-Open-Source-Humanoid-RobotСхема
Контур МВД-1
https://github.com/ashraf-minhaj/MIA-1-Open-Source-Humanoid-RobotПроизводственный процесс
- Введение в терминологию с открытым исходным кодом
- Усовершенствованные сервомоторы, изменяющие трехмерную печать на металле
- Журнал проекта для FirePick Delta, MicroFactory с открытым исходным кодом
- Статья:Знакомьтесь, OAP - открытый проект эталонного дизайна роботов
- Intellisaurus - робот-динозавр
- Робот для открытия резюме
- Простой робот Pi
- AT&T и Tech Mahindra совместно работают над новой платформой искусственного интеллекта с открытым исходным кодом
- Программные риски:защита открытого исходного кода в IoT
- Инструменты разработки IoT с открытым исходным кодом и инструменты, поддерживаемые поставщиком