


Сделайте машинку для письма домашнего задания дома
Компоненты и расходные материалы
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Необходимые инструменты и машины
 |
|
Приложения и онлайн-сервисы
 |
|
Об этом проекте
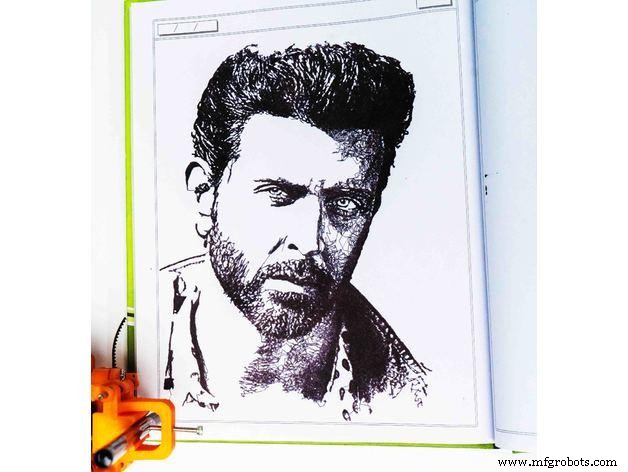
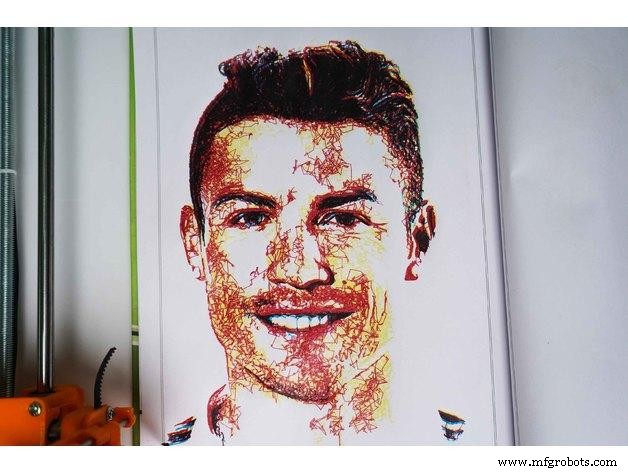
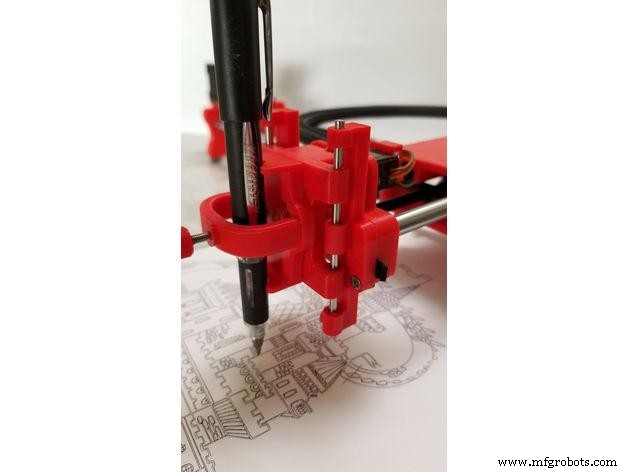
Робот для рисования / перьевой плоттер / рисовальная машина - это открытая аппаратная версия известной машины AxiDraw, которая представляет собой перьевой плоттер, способный писать или рисовать практически на любой плоской поверхности. Он может писать ручками, перманентными маркерами, карандашами и другими пишущими принадлежностями для бесконечного множества приложений.
Его уникальный дизайн отличается пишущей головкой, которая выходит за пределы машины, что позволяет рисовать на объектах, превышающих размеры самой машины. Самым большим преимуществом машины является то, что ее можно разместить над книгой, так как ее основная конструкция расширяет XY.
Этот рисовальный робот / перьевой плоттер / рисовальная машина похож на имеющийся в продаже AxiDraw. Он питается от контроллера Arduino Uno, использует CNC Shield и прошивку GRBL
Стоимость сборки робота-рисовальщика составляет от 75 долларов США в зависимости от того, где вы покупаете детали, и от того, владеете ли вы некоторыми из них, например, Arduino.
Вы можете найти все мои проекты на https://www.diyprojectslab.com/
Максимальная область рисования 24 * 30 см.
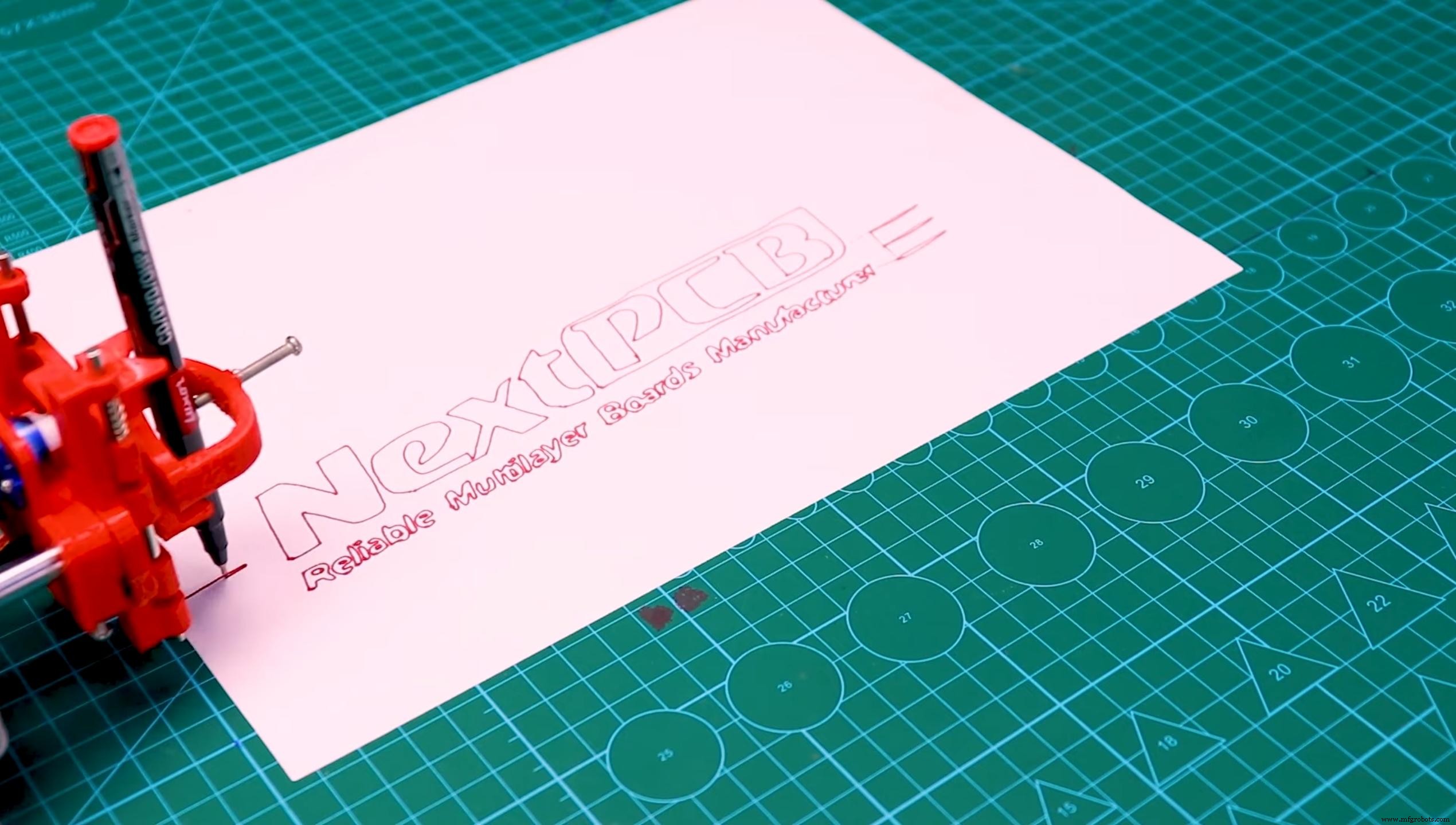
Спасибо, NextPCB
Этот проект успешно завершен благодаря помощи и поддержке NextPCB. Ребята, если у вас есть проект печатной платы, посетите их веб-сайт и получите отличные скидки и купоны.
Бесплатная доставка 0 $ Прототип печатной платы : https://www.nextpcb.com/pcb-quote? Act =2 &code =Romeo ...
Удачный розыгрыш на День Благодарения на Рождество 100% выигрыш:https://www.nextpcb.com/christmas-lucky-draw? Code ...
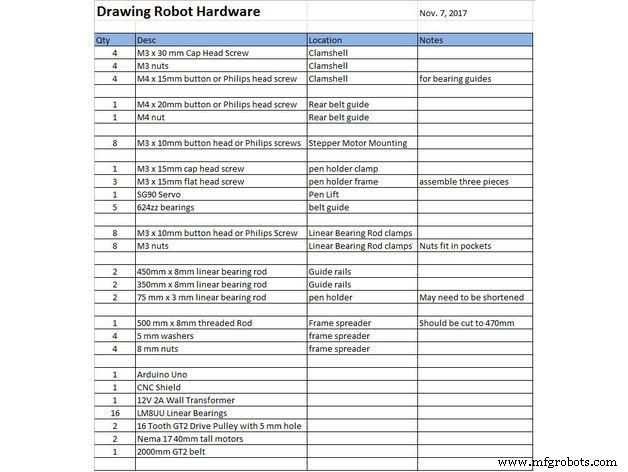
Шаг 1. Необходимые детали и материалы

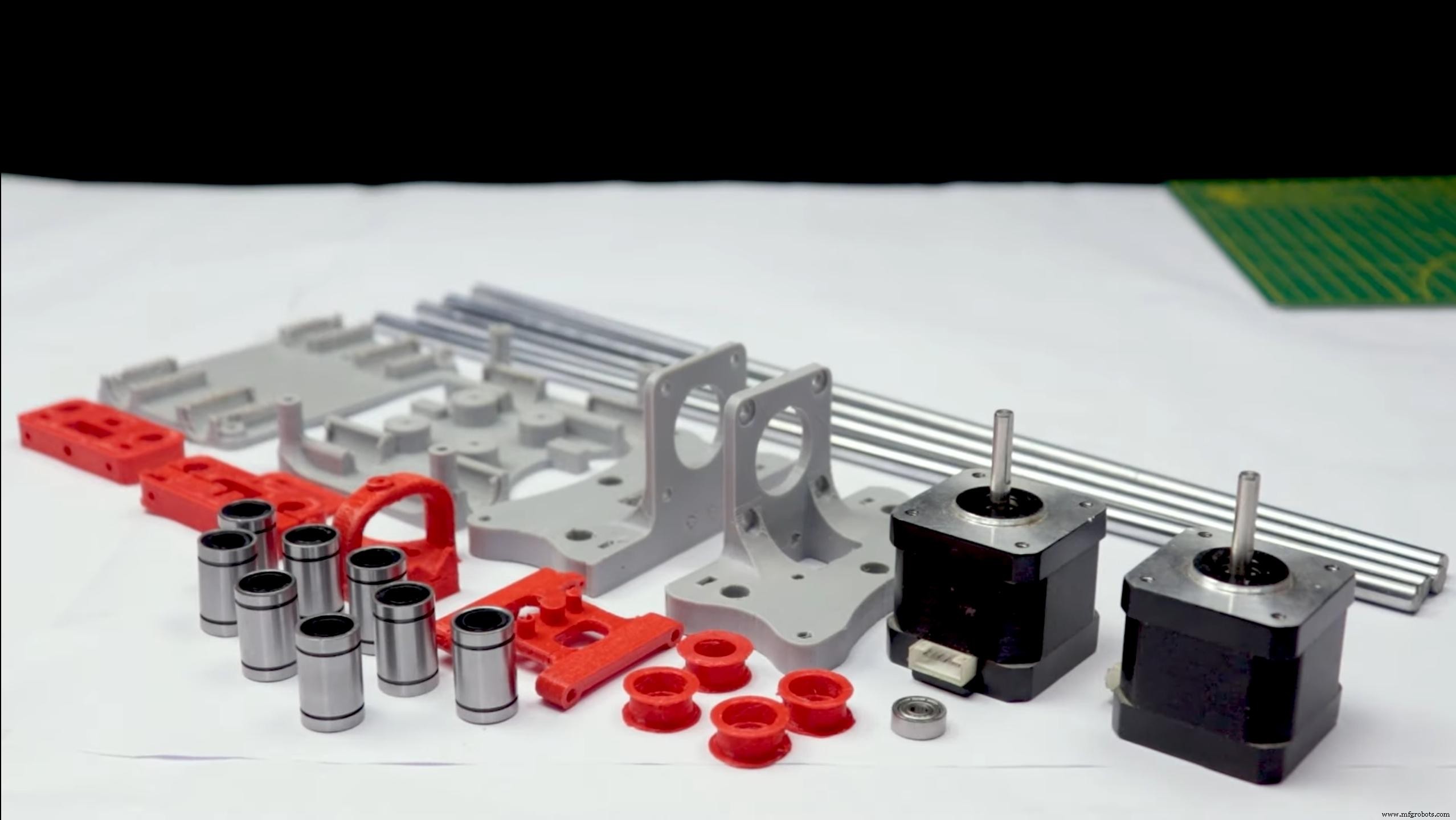
2 шаговых двигателя Nema 17 Amazon.com
2 линейных стержня M8 x 450 мм для оси X Amazon.com
2 x линейный стержень M8 x 350 мм для оси Y Amazon.com
2 x линейных стержня 3 мм для оси Z (вы можете получить их со старого CDROM)
1 x резьбовой стержень M8 x 480 мм 8 x LM8UU подшипники Amazon.com
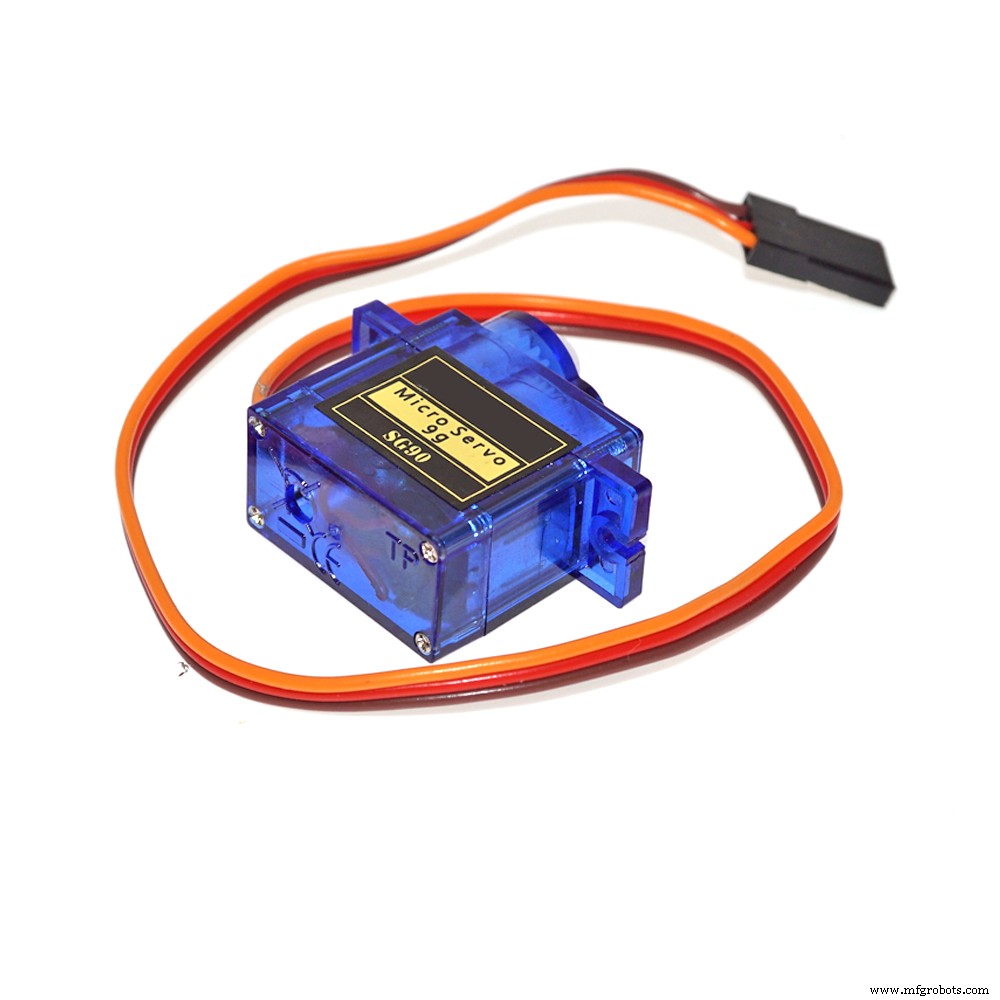
1 сервопривод Sg901 x пружина 5 м (от шариковой ручки) Amazon.com
2 шкива GT2, 16 зубьев Amazon.com
5 подшипников 624zz Amazon.com
1 х 2000 мм ремень GT2 Amazon.com
1 х Arduino Uno Amazon.com
1 x щит с ЧПУ Amazon.com
2 шаговых драйвера A4988 с радиатором Amazon.com
6 джемперов Amazon.com
1 блок питания 12 В, 2 А Amazon.com
Орехи
- 7 x M3-0,5
- 5 x M4-0,7
- 4 x 5/16 дюймов - 18
Амазонка
Винты
- 13 x Phillips M3-0,5 x 16 мм
- 4 штуки Phillips M3-0,5 x 6 мм
- 5 x Phillips M4-0,7 x 35 мм
- 1 шестигранник M3-0,5 x 20 мм
Шайбы
- шайба 4 x 5/16 дюйма
- 4 шайбы M3
Шаг 2. 3D-печать

Загрузите файлы из Thingiverse
Откройте 3D-модели в Cura или любом другом слайсере.
Используйте 75% заполнение для всех деталей (также подойдет заполнение 70–100%)
Распечатал все детали с высотой слоя 0,10 - 0,20 мм
Напечатано с PLA
Используйте опоры на держателе ручки, слайдере, X_Support_L и X_Support_R
Примечание. Самая длинная часть заняла около 10 часов, а самая короткая - 30 минут на печать
Для этого дизайна подходит PLA. Я печатаю при 200C на BuildTak. Ни для одной из частей не требуются плоты или поля. Я предлагаю опоры только для держателя ручки и торцевой пластины оси Z, которая находится в вертикальном положении.
Шаг 3. Соберите ось X
Помните, что вам потребуются (2) линейные стержни длиной 350 мм и (2) 450 мм
Возьмите (2) 450 мм . линейные стержни и вставьте их в любую часть x-опоры
- Может потребоваться круглый напильник, чтобы сгладить отверстия, в которые вы вставляете их.
- Кроме того, вы можете использовать резиновый молоток, чтобы вставить стержни.
Теперь возьмите стержень с резьбой и вставьте его в отверстие внизу. Установите шайбу 5/16 дюйма и гайку 5/16 дюйма с обеих сторон x-образной опоры
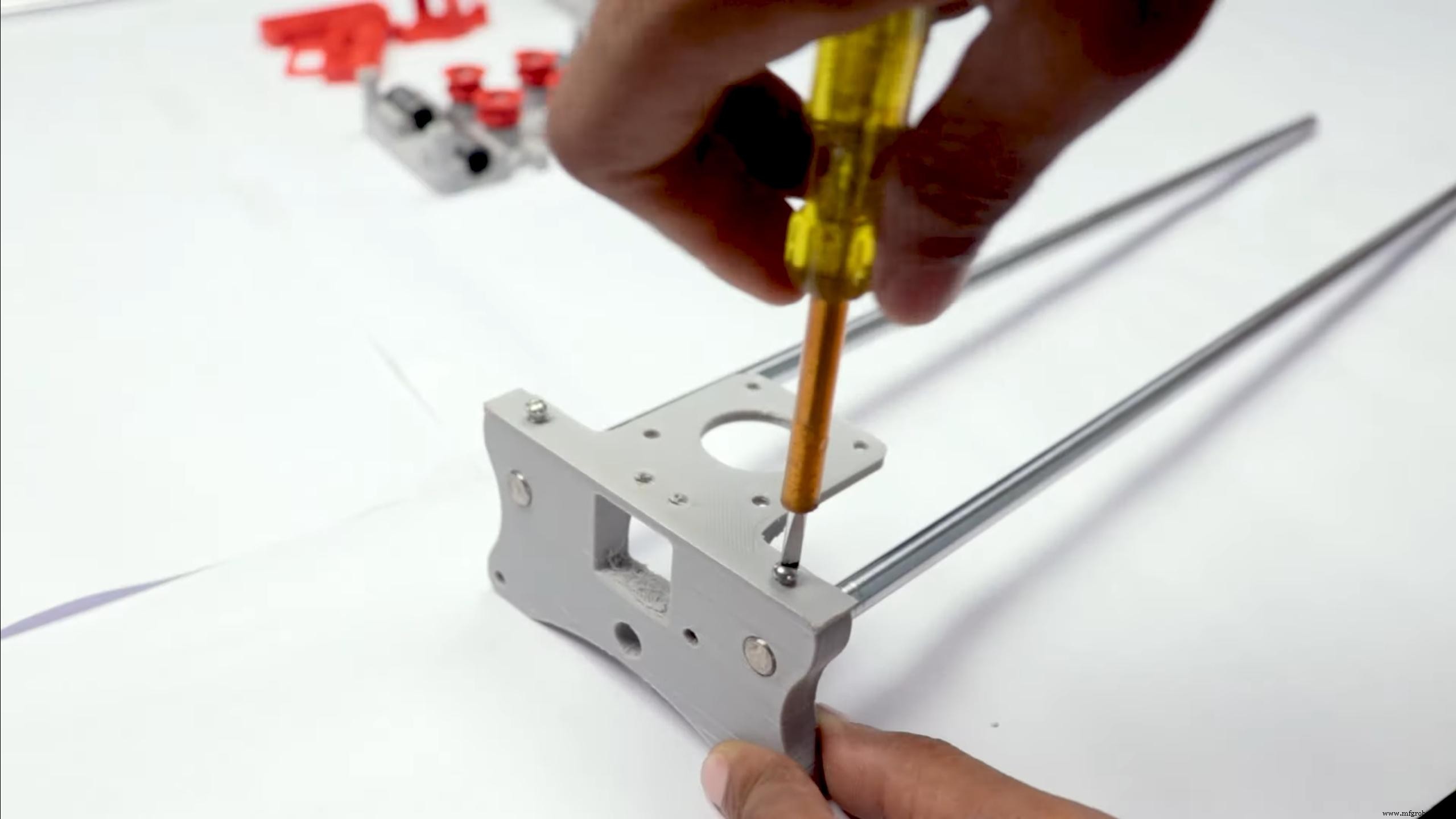
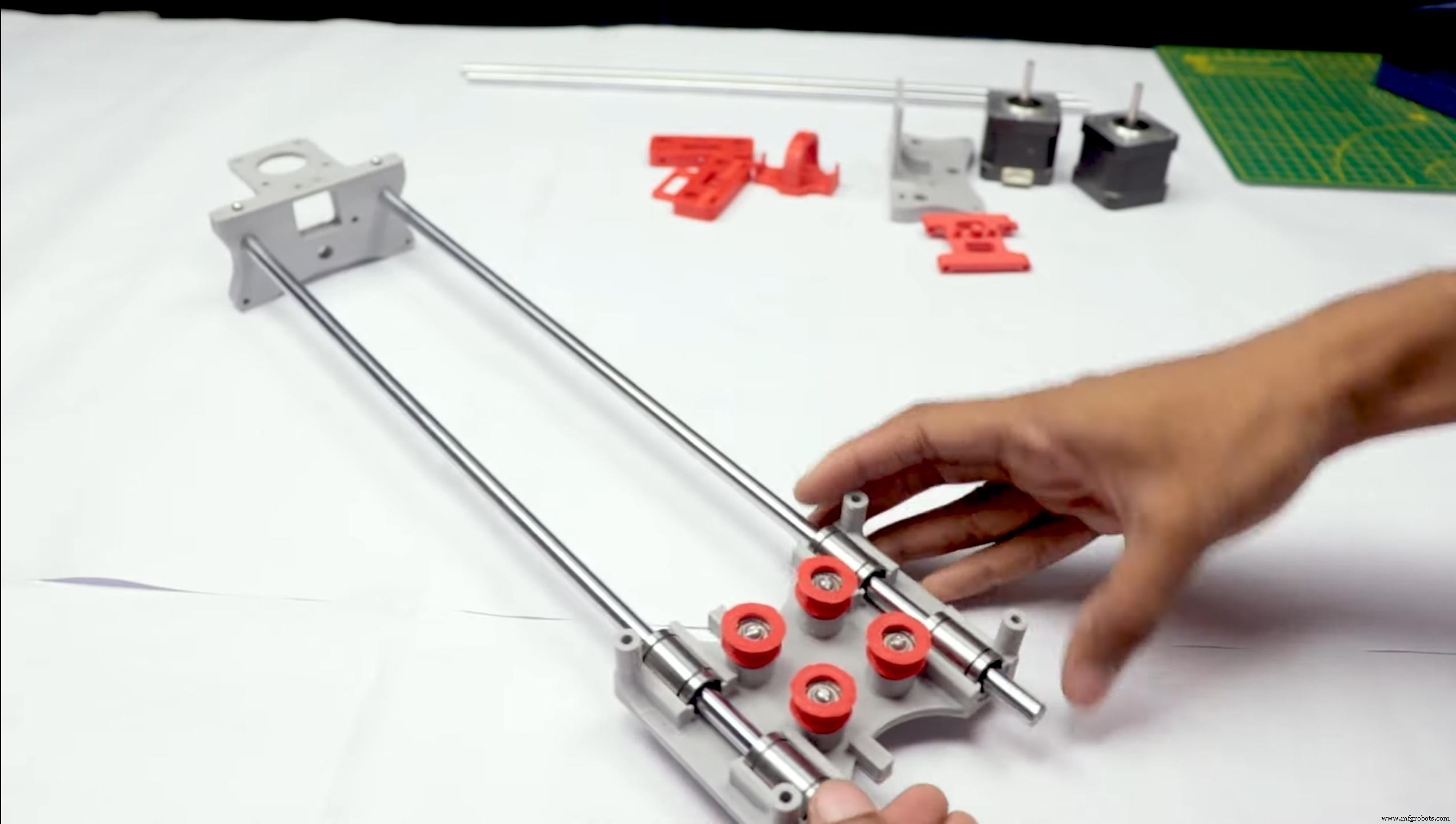
Шаг 4. Соберите подшипник оси X


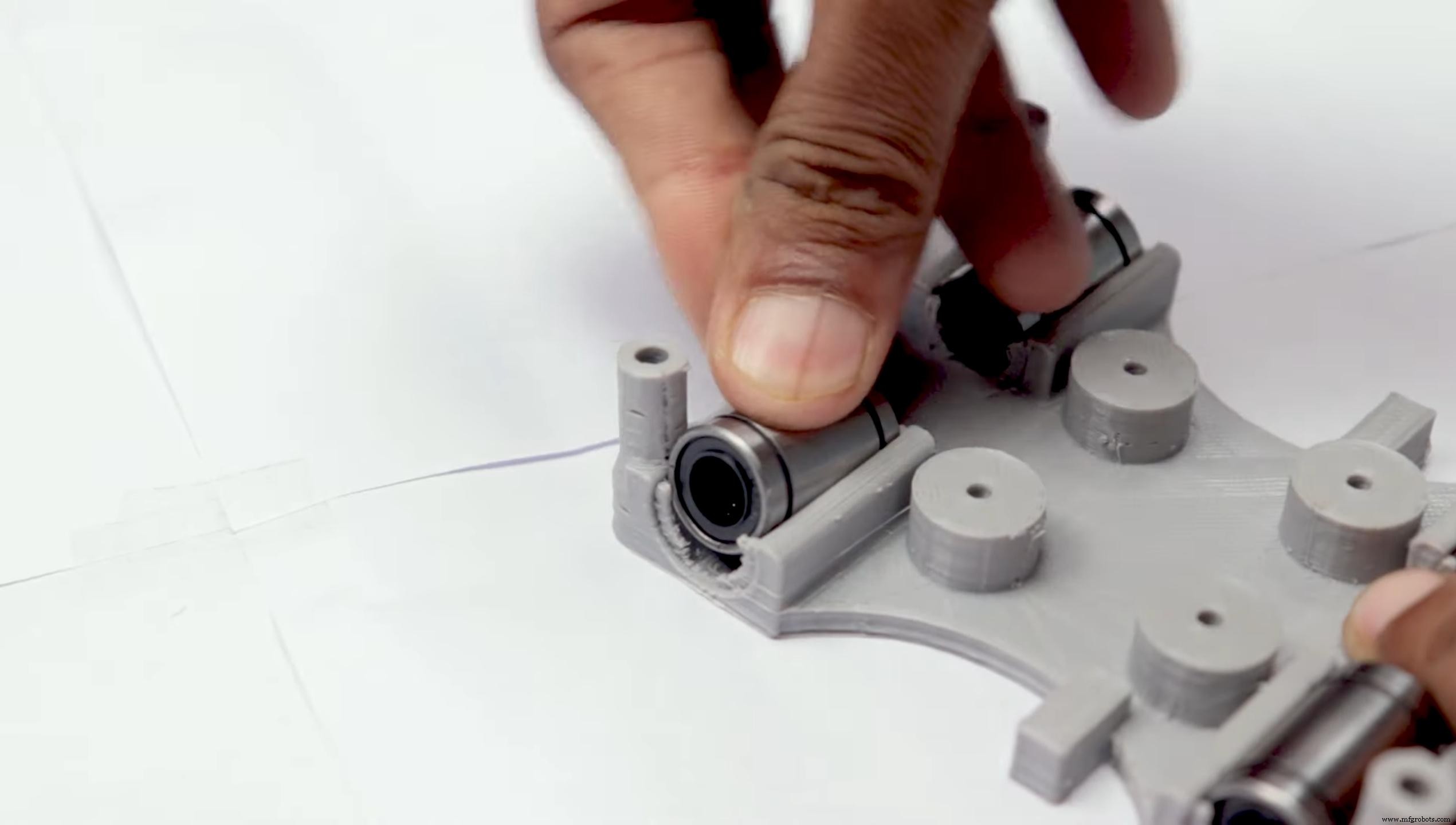


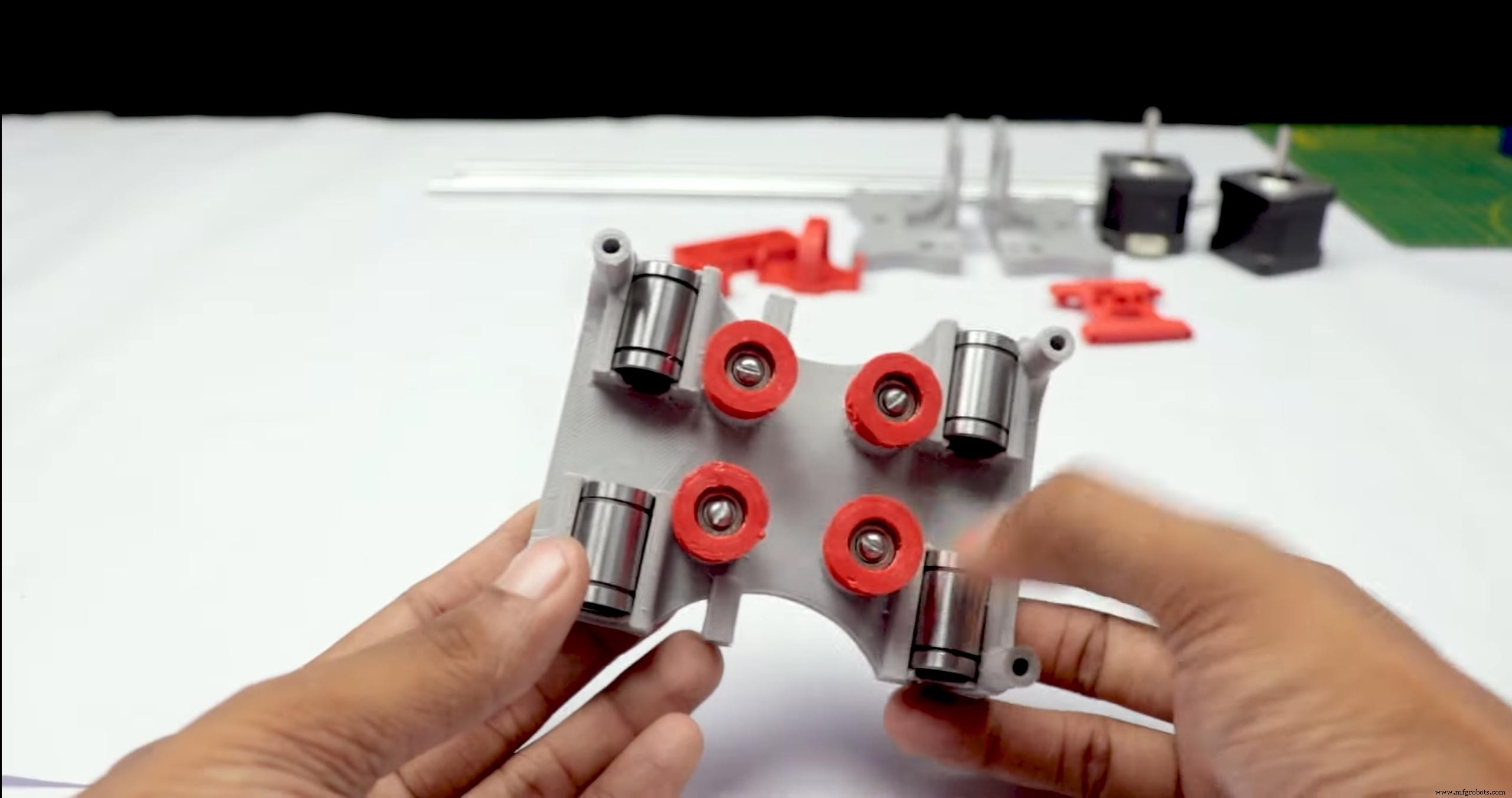
Теперь вы хотите вставить подшипники LM8UU на их место на верхнем и нижнем корпусе грейфера (на каждый верхний и нижний вкладыши устанавливаются (4) подшипника)
Возьмите (4) подшипника 624zz и протолкните их через натяжные ролики, напечатанные на 3D-принтере. Оставьте 5-й подшипник на потом при сборке оси Y
Соберите ось X (каретку)
- Приобретите (4) винта M3-0,5 x 20 мм, (4) гайки M3, (4) шайбы M3 и (4) подшипники 624zz с установленными промежуточными шкивами.
- Возьмите один винт и пропустите через него шайбу, она будет опираться на подшипник. Гайка будет внизу каретки, которая зафиксирует подшипник на месте.
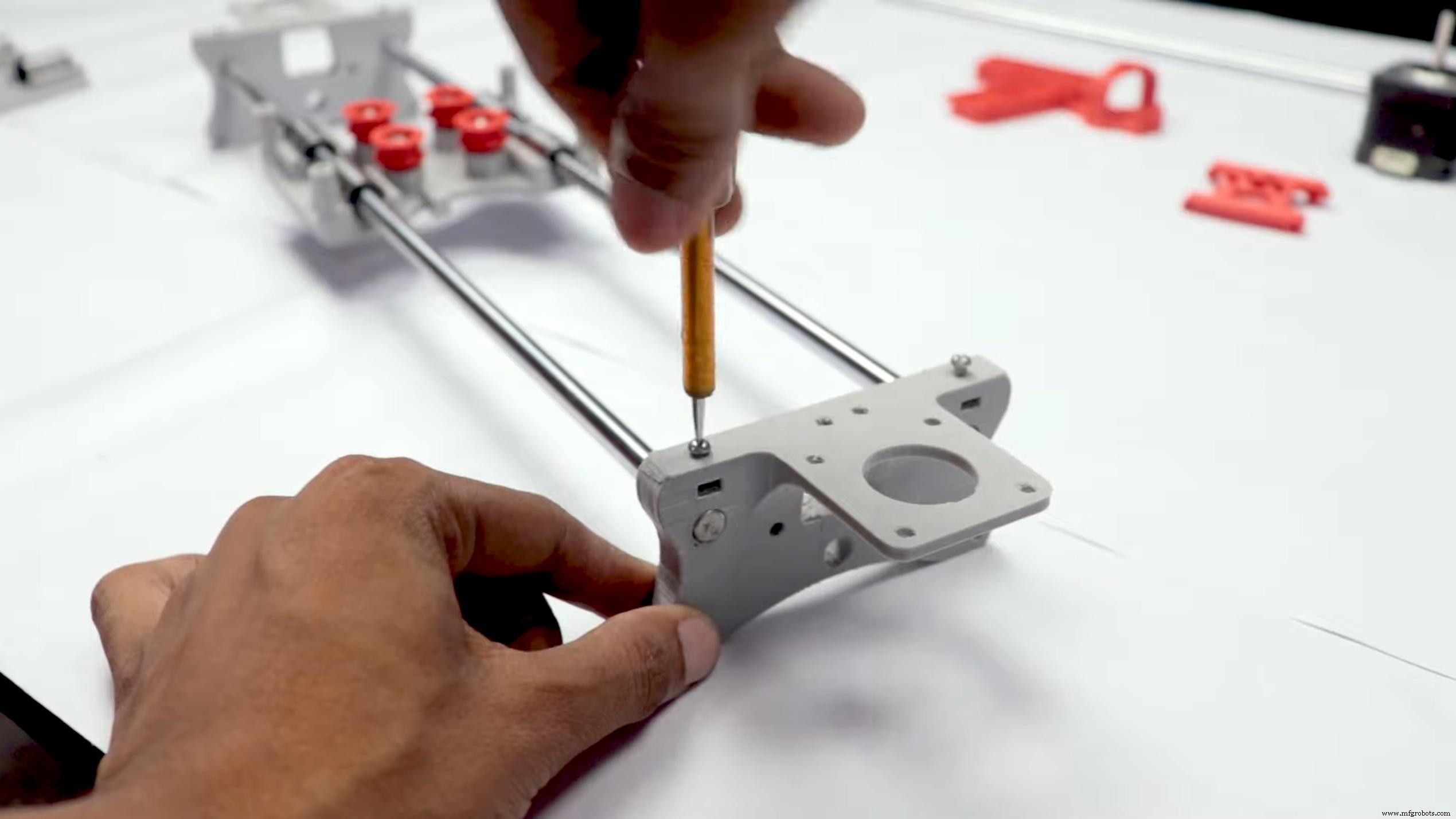
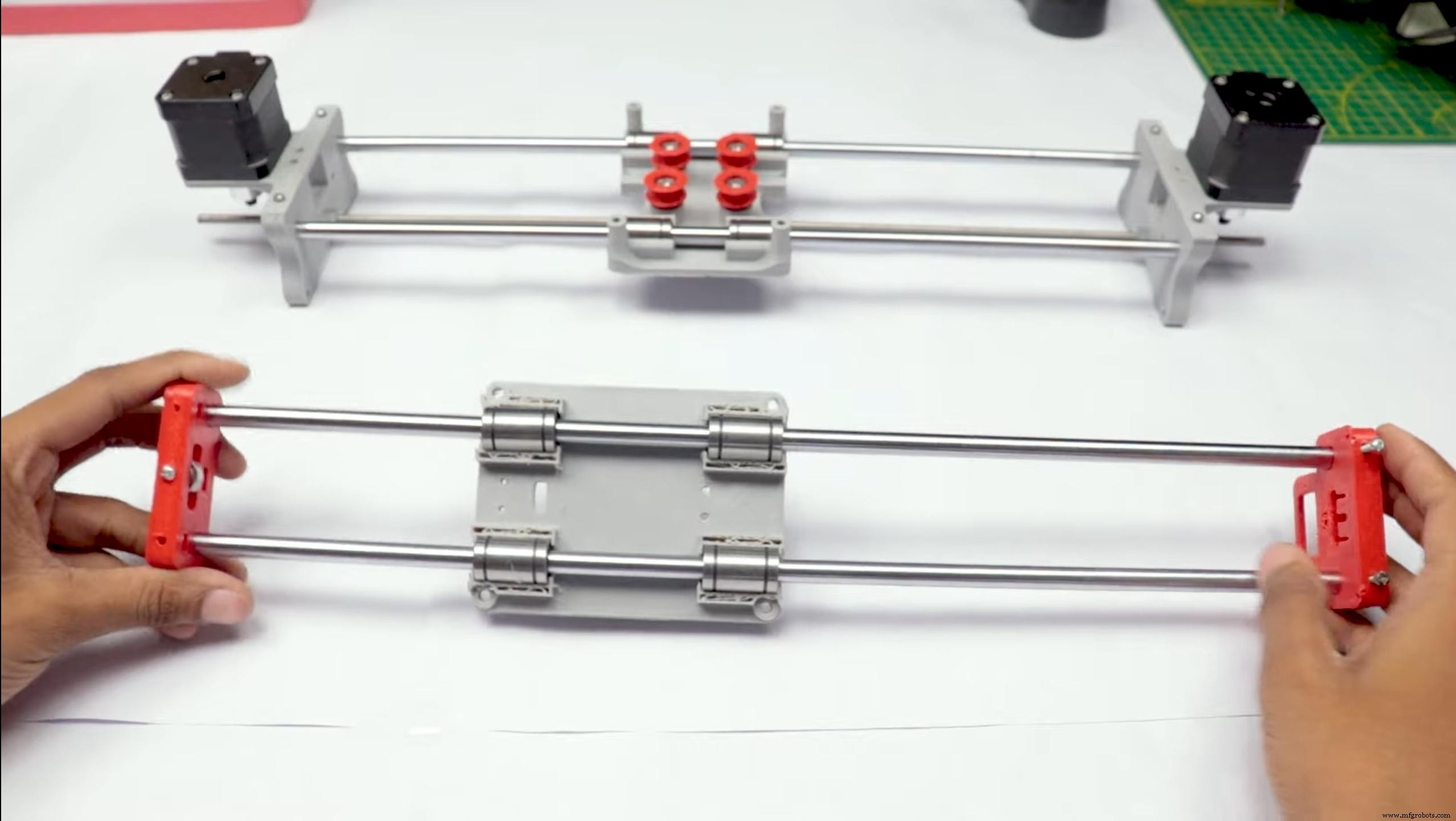
Соберите ось X (опора X)
- Проденьте грейфер через линейные стержни 450 мм (ось X).
- Снова используйте резиновый молоток, чтобы прикрепить последнюю X-образную опору к линейным стержням.
- Убедитесь, что стержни одинаково выступают с обеих сторон.
- Проденьте другой конец стержня с резьбой через отверстие в X-образной опоре.
- Установите последний комплект гаек и шайб, чтобы удерживать X-образную опору на месте.
- Теперь, когда ось X завершена, вы можете использовать (2) винта Phillips M3-0,5 x 16 мм на каждую опору X, чтобы не допустить скольжения линейных стержней.
Шаг 5. Соберите ось Y
Y-Назад
- Возьмите (2) линейных стержня 350 мм и вставьте их в Y-образную заднюю часть с помощью резинового молотка.
- Возьмите (1) винт M4-0,5 x 35, (1) гайку M4 и пятый подшипник 624zz.
- Приобретите (2) винта M3-0,5 x 16, чтобы закрепить линейные стержни.
- Вставьте подшипник, вставляя винт через Y-образную заднюю часть.
Y-спереди
- Проденьте линейные стержни / заднюю часть Y через подшипники LM8UU и прикрепите переднюю часть Y с помощью резинового молотка.
Шаг 6. Соберите ось X-Y (ремень)
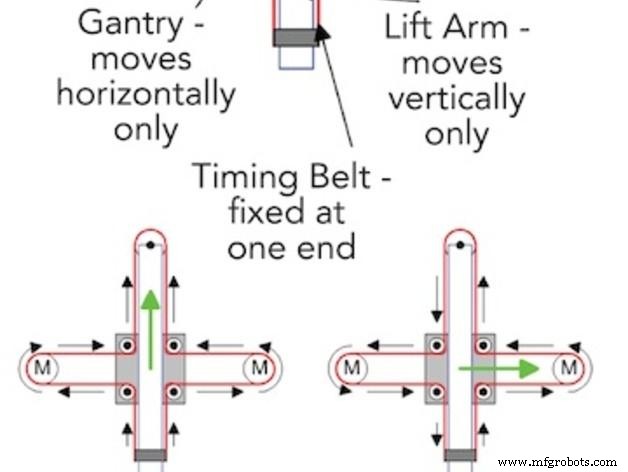
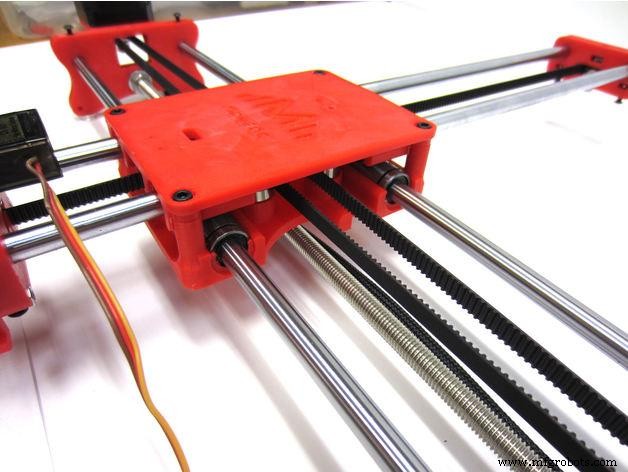

- Используйте плоскогубцы, чтобы облегчить продвижение ремня GT2 через раскладушку.
- Возьмите два конца ремня и проденьте их сквозь «зубцы» на базовом слайдере.
- Ремень должен быть туго натянутым, а не ослабленным.
- Обратите внимание, что после того, как ремень GT2 надет, раскладушка не может легко двигаться.
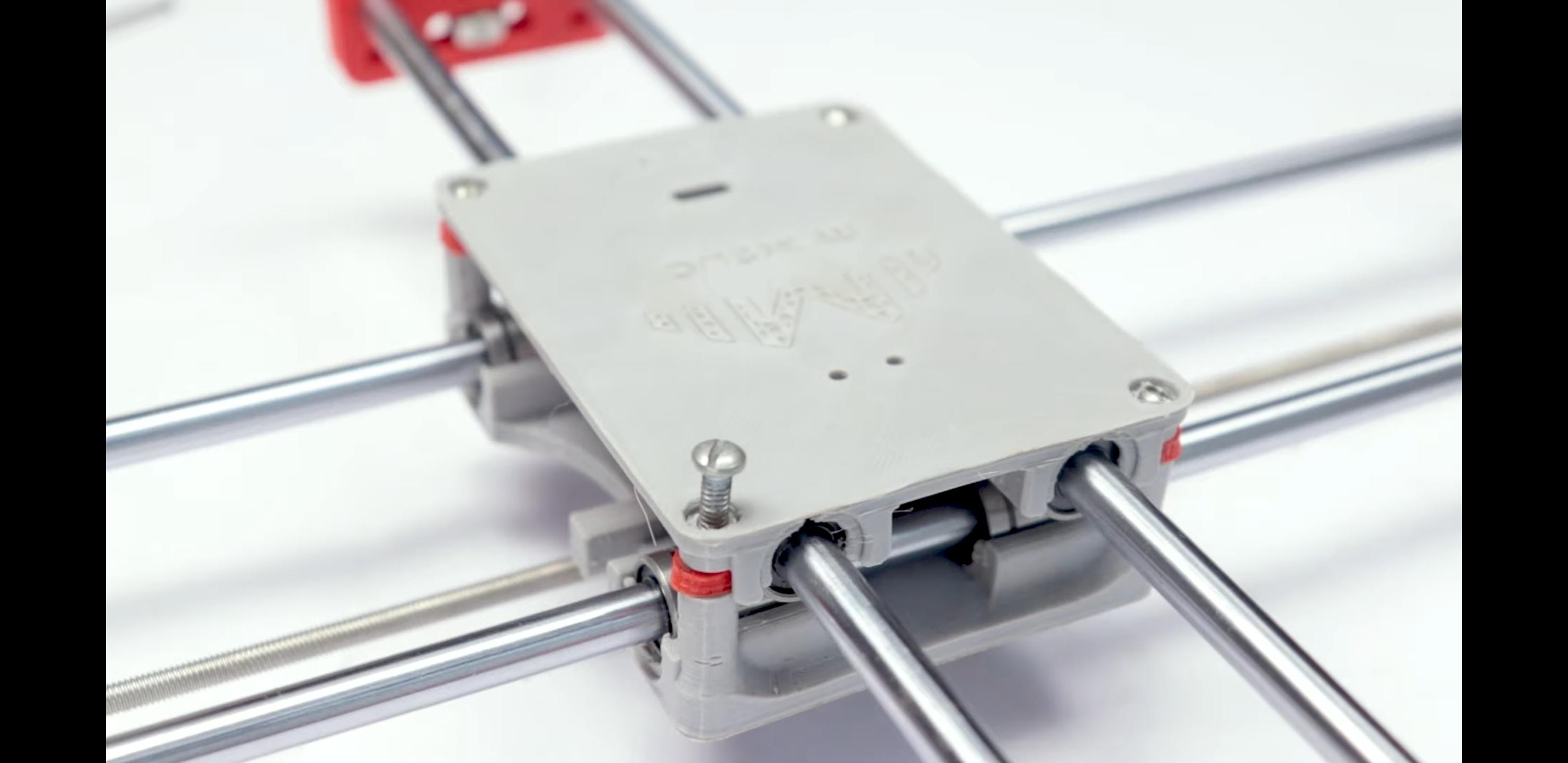
Шаг 7. Соберите ось Z

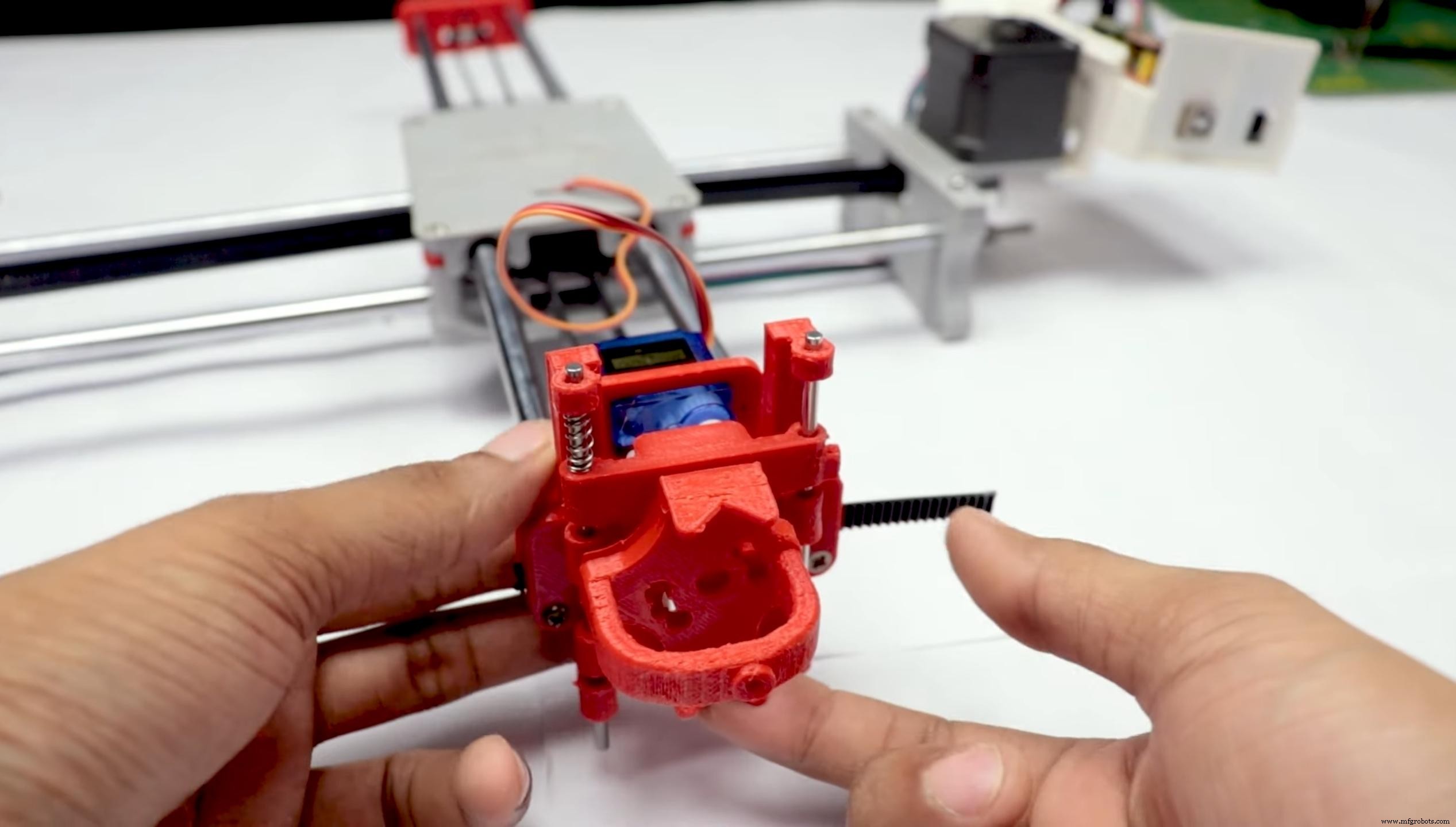
- Приобретите (2) линейных стержня 3 мм и следующие детали, напечатанные на 3D-принтере (слайдер, держатель для ручки, базовый слайдер, метрический винт с накатанной головкой 3 мм).
- Возьмите (1) винт с шестигранной головкой M3-0,5 x 20 мм и метрический винт с накатанной головкой и сдвиньте их вместе. Используйте суперклей, чтобы держать их вместе.
- Возьмите (3) винта M3-0,5 x 16 мм, которые вы будете использовать, чтобы прикрепить салазки основания к Y-образной передней части. Возможно, вам понадобится (3) гайки M3-0,5, чтобы удерживать его на месте.
- Сдвиньте слайдер и держатель ручки вместе, чтобы получилось одно целое.
- Теперь возьмите эту новую деталь и (2) линейных стержня диаметром 3 мм и проденьте стержни в отверстия. Поместите небольшую пружину между двумя частями, чтобы было небольшое усилие для подъема слайдера. Возможно, вам придется немного разрезать пружину, пока на ползунок не будет достаточного давления.
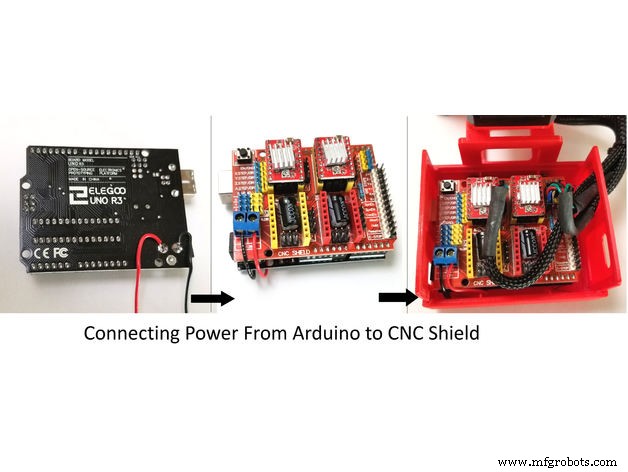
Шаг 8:ЭЛЕКТРОНИКА
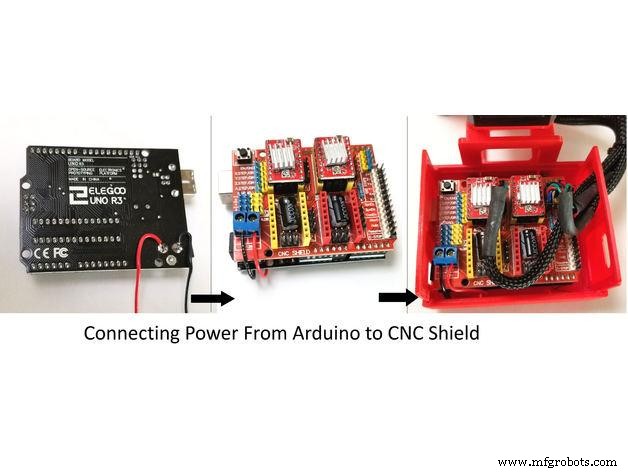
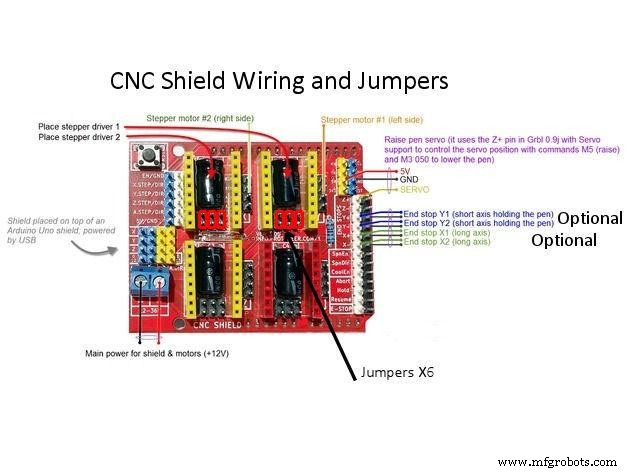

ЭЛЕКТРОНИКА
Я предпочитаю, чтобы вы могли использовать Arduino uno CNC Shield
Готовы на все твои трассы
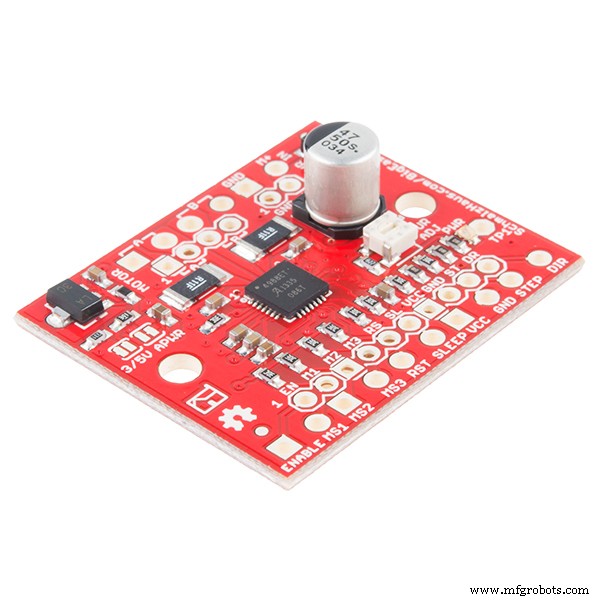
1) Драйвер шагового двигателя A4988, 4 шт.
2) Драйвер платы расширения A4988
3) Arduino UNO. Прежде всего, возьмите раковину и установите драйвер двигателя A4988.
Драйвер шагового двигателя A4988 подключается к модулю драйвера платы расширения A4988, затем подключается к Arduino с платой расширения и подключается вся проводка. Щит также имеет встроенное микрошаговое управление - это означает, что вместо использования полных шагов или полушагов, как в большом ЧПУ подойдет, мы можем заставить двигатели двигаться на 1/16 или 1/32 шага, чтобы лазер двигался с максимально возможной точностью. Однако двигатели будут потреблять больше электроэнергии:они быстрее нагреваются.
Чтобы использовать микрошаговые режимы, закоротите несколько контактов режима вместе. Различные комбинации дают разное разрешение. Взгляните на таблицу, чтобы увидеть различные возможные конфигурации. Когда экран запрограммирован, добавьте к нему драйверы A4988 и подключите остальную электронику.
Чтобы найти катушки шаговых двигателей, воспользуйтесь мультиметром. Если между двумя проводами есть сопротивление, у вас есть катушка. На схеме катушки представлены двумя проводами одного цвета.
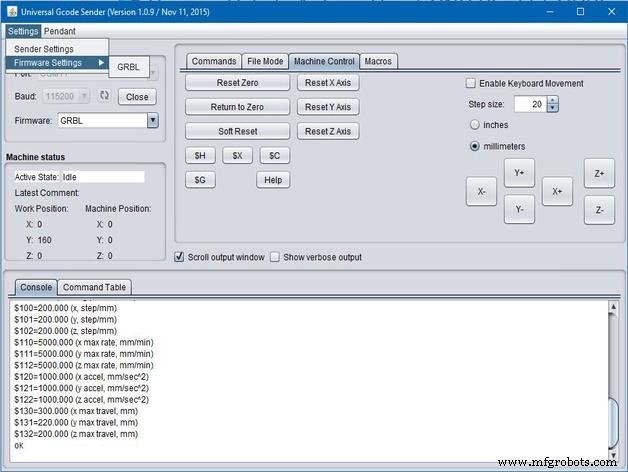
Шаг 9:ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ
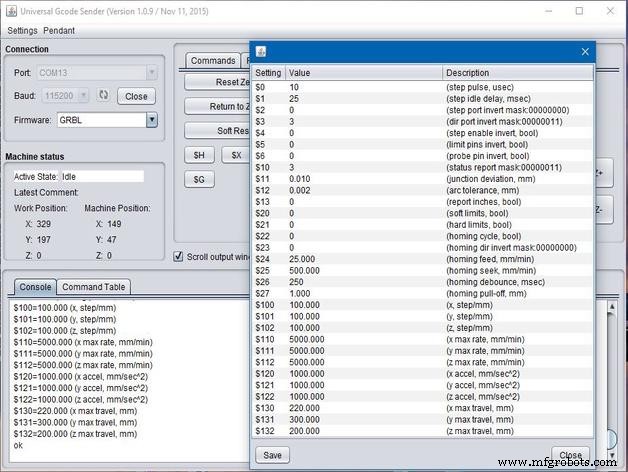
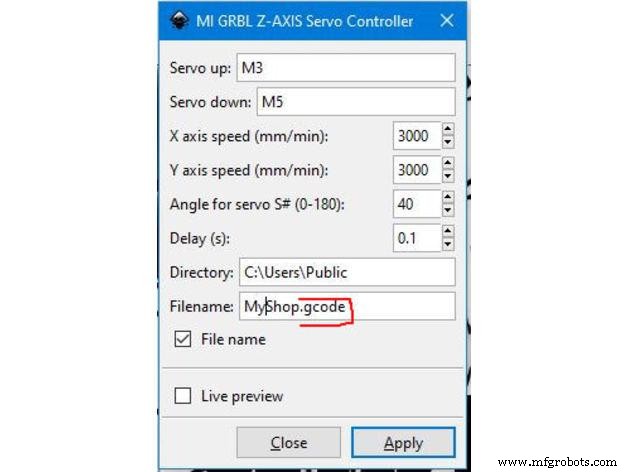
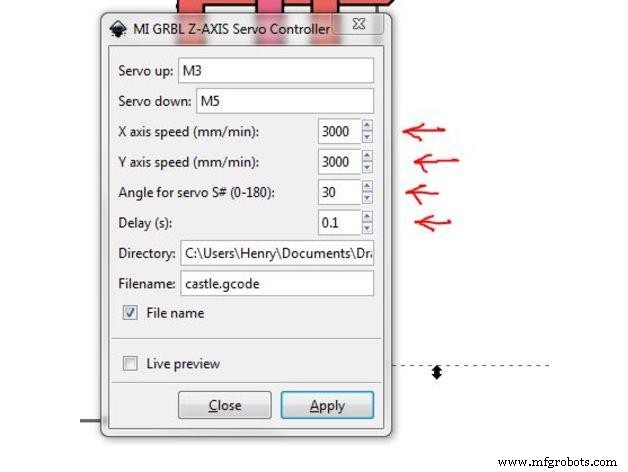
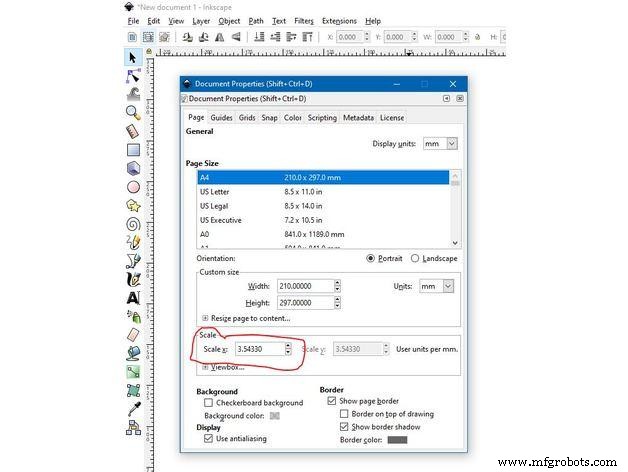
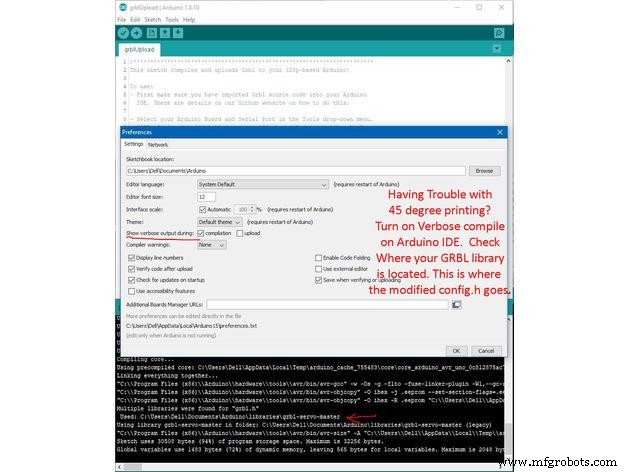
Inkscape, программное обеспечение для графического дизайна (рисование или импорт графики)
Inkscape MI GRBL Extension (преобразование графики в G-код) Универсальный отправитель G-кода (отправляет G-код роботу, вызывая движение рисования) GRBL, который является прошивкой Arduino (запрограммирован в Arduino Uno)
Arduino:https://www.arduino.cc/en/software
.Универсальный отправитель G-кода:https://winder.github.io/ugs_website / ...
Inkscape:https://inkscape.org/release/inkscape ..
Лазер 4xiDraw &km:https://drive.google.com/file/d/1YO8 -...
Обработка:https://processing.org/download/
рисунок для обработки G-кода:https://drive.google.com/file/d/1PIFx ...
посмотрите видео для полной настройки
Шаг 10:машина для рисования в действии
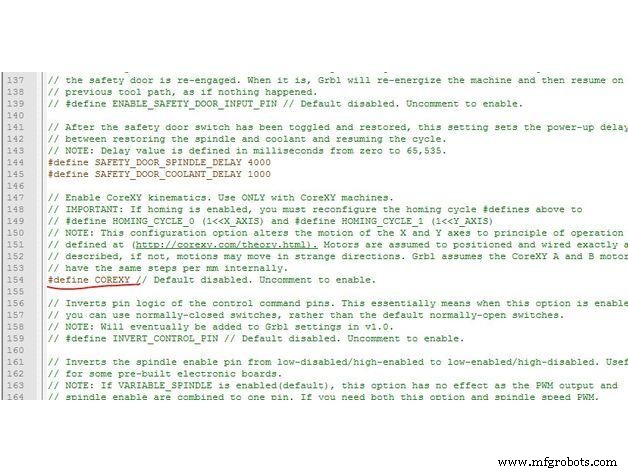
Код
- код grbl
код grbl Arduino
/ ********************************************* ************************ Этот скетч компилирует и загружает Grbl в ваш Arduino на базе 328p! Для использования:- Сначала убедитесь, что вы импортировали исходный код Grbl в свою Arduino IDE. Подробную информацию о том, как это сделать, можно найти на нашем веб-сайте Github. - Выберите плату Arduino и последовательный порт в раскрывающемся меню «Инструменты». ПРИМЕЧАНИЕ:Grbl официально поддерживает только Arduinos на основе 328p, например Uno. Использование других досок, скорее всего, не сработает! - Затем просто нажмите «Загрузить». Вот и все! Для опытных пользователей:если вы хотите увидеть, что еще может делать Grbl, есть несколько дополнительных опций для настройки и функций, которые вы можете включить или отключить. Переместите свою файловую систему туда, где IDE Arduino хранит файлы исходного кода Grbl, откройте файл config.h в своем любимом текстовом редакторе. Внутри находятся десятки описаний функций и #defines. Просто прокомментируйте или раскомментируйте #defines или измените присвоенные им значения, сохраните изменения и нажмите «Загрузить» здесь. Copyright (c) 2015 Sungeun K. Jeon Выпущено по лицензии MIT. Подробности см. В файле license.txt. ****************************************** *************************** / # include// Не изменяйте этот файл!
Схема
Производственный процесс
- Робот-последователь линии
- Учебная платформа Arduino
- Автономный домашний робот-помощник
- Станок с ЧПУ
- Самодельная рука робота Arduino - управляемая жестами рук
- Домашний монитор
- Как сделать мини-осциллограф дома с помощью Arduino Nano
- Идея DIY с RFID
- Самодельная машина с когтями
- Плоттер с ЧПУ Arduino (чертежная машина)