


3D-сканеры
Одним из больших достижений в области промышленного инжиниринга стала разработка обратного инжиниринга. процессы. Он заключается в извлечении информации непосредственно из физической системы и преобразовании ее в цифровую модель.
Обратный инжиниринг дает много преимуществ при моделировании и симуляции системы или продукта. С одной стороны, это позволяет извлекать из модели непосредственную информацию. что надежнее и качественнее, а с другой стороны ускоряет и сокращает время работы. Это позволяет моделировать сложные системы более надежно и за меньшее время.
Одной из областей, в которой обратный инжиниринг применяется наиболее успешно, является метрология с оцифровкой сложной геометрии.
3D-сканеры
3D-сканирование — это процесс преобразования физической поверхности в цифровую модель. Он заключается в извлечении относительного положения нескольких точек на этой поверхности (облаке точек) и цифровой интерполяции поверхности, содержащей их, таким образом реконструируя геометрию детали.
Основными параметрами, определяющими это облако точек, являются разрешение и точность. Разрешение определяется минимальным расстоянием, которое может быть разрешено между двумя точками, а точность - ошибкой определения реального положения каждой точки. Более высокое разрешение позволит фиксировать более мелкие детали, а высокая точность обеспечит модели с размерами, более близкими к реальным, и, следовательно, с меньшими допусками.
Устройства, разработанные для этой цели, называются 3D-сканерами. Существует множество типов в зависимости от их технологии, и их можно разделить на две основные группы:контактные и бесконтактные.
Контактные 3D-сканеры вероятно, наименее распространены, хотя и являются одними из наиболее точных. Они состоят из шарнирного рычага, обычно с 6 степенями свободы, со стилусом на конце. Оператор пересекает поверхность стилусом, в то время как датчики фиксируют положение с определенной частотой. Основным недостатком этой технологии является то, что она требует, чтобы оператор сканировал всю поверхность стилусом, что может быть очень медленным процессом. С другой стороны, трение иглы о поверхность может повредить поверхность, что может создать проблемы с археологическими артефактами или произведениями искусства.

Изображение 1:3D-сканер с контактом Faro. Источник:Faro.com
Бесконтактные сканеры основаны на оптических технологиях и делятся на две категории:пассивные системы и активные системы.
Пассивные системы в основном основаны на извлечении геометрической информации о поверхности из фотографий, сделанных с двух определенных точек зрения, метод, известный как стереоскопия и основанный на эффекте параллакса человеческого зрения. Его главное преимущество заключается в том, что он может быстро и дешево отображать большие поверхности. но его разрешение и точность очень низкие. Более того, он не позволяет фиксировать реальные измерения, поэтому требуется дополнительная система, позволяющая масштабировать модель до ее реальных размеров.
Самая известная технология пассивного 3D-сканирования это фотограмметрия в основном используется в топографической картографии и гражданском строительстве. Обычно он дополняется данными спутникового позиционирования, чтобы добавить точные данные о размерах.
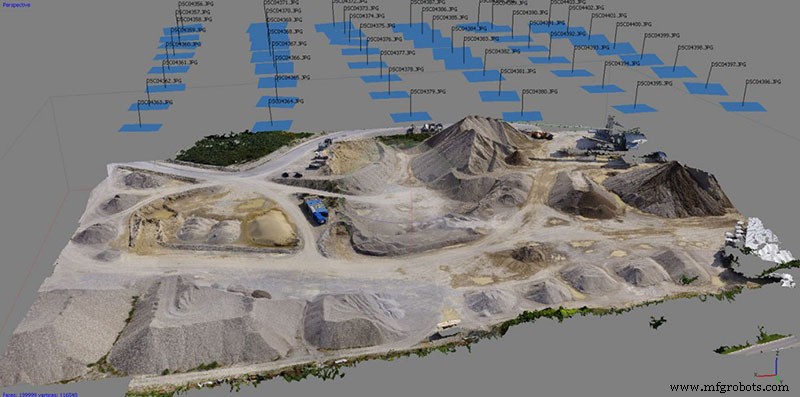
Изображение 2:Топографическая модель, созданная методом фотограмметрии. Источник:aamspi.com
Наконец, существуют системы активного бесконтактного 3D-сканирования. Это самая большая группа и наиболее широко используемая в промышленности, искусстве, медицине и развлечениях.
Этот тип системы основан на измерении сигнала, который излучается на поверхности. Хотя можно использовать любой тип сигнала, способный взаимодействовать с поверхностью, например ультразвук, наиболее распространены оптические системы.
В этой категории есть несколько технологий, однако наиболее распространенными являются четыре: времяпролетные 3D-сканеры, триангуляционные 3D-сканеры, 3D-сканеры с разностью фаз и 3D-сканеры со структурированным светом.
Времяпролетные (Tof) 3D-сканеры :основано на расчете расстояния до поверхности путем измерения времени, необходимого импульсу лазерного излучения для перемещения к поверхности и от нее. Он сочетает в себе большую дальность с высокой частотой захвата точек. Он в основном используется для картирования крупных конструкций или в качестве метрологического инструмента для определения деформаций в элементах конструкций . В настоящее время его непрофессиональное использование стало обычным явлением благодаря его реализации в некоторых телефонах, таких как iPhone, благодаря лидарному датчику.
Видео 1. 3D-сканирование с использованием технологии Tof на iPhone. Источник:labs.laan.com
Триангуляционные или лазерные 3D-сканеры: Они состоят из лазерного излучателя и матрицы фотодиодов, расположенных под определенным углом. Когда лазерный луч отражается от картографируемой поверхности, он падает на определенную точку на датчике в зависимости от расстояния до поверхности. Это позволяет триангулировать положение точки падения лазерного луча. Это одна из самых точных систем. однако это зависит от угла, под которым лазер падает на поверхность, поэтому требуется очень короткое рабочее расстояние. Он подходит для картирования объектов малого и среднего размера с высоким разрешением и точностью.
Видео 2. Работа 3D-триангуляционного сканера. Источник:www.micro-epsilon.com
Сканеры разности фаз: Это промежуточное решение для двух предыдущих. Они состоят из модулированного лазерного излучателя и детектора и определяют расстояние до объекта путем сравнения фазы излучаемого и принимаемого света. У них хорошее рабочее расстояние и средняя точность. что делает их подходящими для картографирования больших объектов с хорошей точностью.
Сканеры структурированного света: Вероятно, самый распространенный сегодня. Т Это самые универсальные 3D-сканеры, поскольку они сочетают в себе превосходное разрешение, высокую точность, высокую скорость сканирования и низкую стоимость. Они состоят изкамеры с калиброванным объективом и проектора, который проецирует световые узоры на поверхность. Камера фиксирует изображения деформаций этих узоров на поверхности и с помощью сложных алгоритмов обработки генерирует облако точек. Эта система позволяет получать сотни точек при каждом захвате, поэтому имеет высокую скорость сбора данных. Кроме того, в зависимости от используемого объектива можно регулировать рабочее расстояние, точность и разрешение. У них также есть то преимущество, что многие модели, например, от Thor3D, можно использовать с рук без штатива. Их основной недостаток заключается в том, что они чувствительны к условиям внешней освещенности и отделке детали, поэтому 3D-сканирование необходимо проводить при соответствующем освещении, а в случае глянцевых или прозрачных поверхностей может потребоваться нанесение специальной матовой краски. /Р>
Видео 3. 3D-сканер Calibry Structured Light. Источник Thor3Dscanner.com
Обработка облака точек
Как правило, системы 3D-сканирования не собирают непрерывные данные. но дискретные положения поверхности, которые необходимо захватить. Это известно как облако точек. Облако точек, полученное с помощью 3D-сканера, нельзя использовать напрямую, поэтому для получения цифровой копии необходимо выполнить несколько задач постобработки.
Окончательное качество модели будет зависеть помимо старта с качественного облака точек, на его правильную обработку. Для этого требуется программное обеспечение с хорошими алгоритмами реконструкции и некоторые знания в области обработки облаков точек.
Прежде всего, если 3D-сканирование было выполнено в нескольких снимках, необходимо выровнять и объединить различные облака точек, чтобы получить единое облако, охватывающее всю модель. Точность совмещения облаков точек во многом будет зависеть от возможностей отслеживания 3D-сканера. Отслеживание маркеров всегда будет проще всего выровнять, однако бывают случаи, когда маркеры использовать нельзя, например, в случае иллюстраций. Для этих случаев некоторые сканеры, такие как Calibry или Calibry Mini, включают несколько параметров отслеживания, например отслеживание текстуры.
Видео 4:3D-сканирование с помощью маркеров. Источник:Thor3Dscanner.com.
Далее облако точек необходимо очистить, удалив те точки, которые не соответствуют поверхности, либо потому, что они принадлежат объектам в окружающей среде, либо потому, что они появляются из-за ошибки в 3D-сканере. Качественный 3D-сканер вместе с хорошим процессом сканирования обеспечит чистое облако точек с небольшим количеством лишних точек или без них.
После очистки облака точек необходимо восстановить сетку . Выбор соответствующих параметров позволит получить точные и правильно настроенные сетки.
После преобразования облака точек в полигональную сетку его нужно будет проверить и исправить. Одним из наиболее распространенных дефектов обычно является появление пропусков в сетке из-за отсутствия данных при сканировании. Единственным способом исправить эти дефекты будет применение заплаты путем интерполяции. Качество алгоритмов интерполяции, реализованных в программном обеспечении, будет влиять на качество реконструкции.
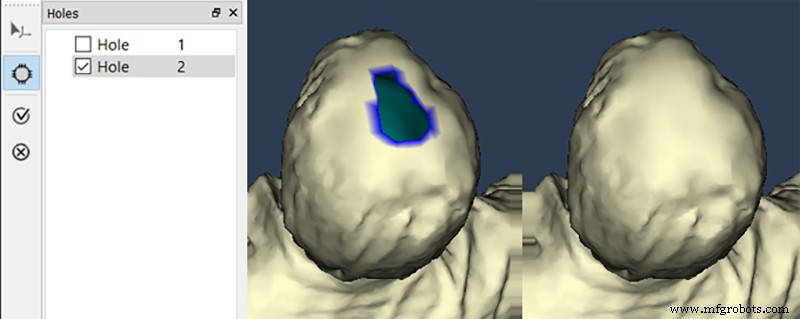
Изображение 3. Заделка дыры в сетке с помощью Calibry Nest. Источник:Thor3Dscanner.com.
Наконец, необходимо оптимизировать сетку. Тип оптимизации во многом будет зависеть от конечного приложения. Сетку можно упростить, пожертвовав разрешением за счет уменьшения размера файла. Упрощение сетки часто помогает исправить небольшие дефекты, достигая более простой и однородной геометрии. . С другой стороны, разрешение сетки можно увеличить путем интерполяции новых элементов. Увеличение разрешения сетки не увеличивает разрешение захвата , однако это может помочь добиться большей непрерывности и гладкости поверхностей с кривизной.
Некоторые 3D-сканеры, например, основанные на структурированном свете, позволяют одновременно фиксировать текстуру и цвет поверхностей с помощью фотографий. Это позволяет сделать дополнительный шаг в обработке, позволяя накладывать текстуру на сетку. Это особенно интересно для приложений, связанных с искусством и развлечениями.
Видео 5:3D-модель с текстурой, отсканированная с помощью Calibry. Источник:Thor3Dscanner.com.
Существует множество возможных применений 3D-сканеров в различных отраслях промышленности. Например, в медицине и ортопедии они могут воспроизводить в цифровом виде части тела пациента для разработки индивидуальных ортезов. В сфере развлечений они широко использовались в фильмах и видеоиграх для создания цифровых двойников актеров. Они все чаще используются в искусстве и археологии для создания цифровых копий произведений искусства и исторических артефактов для изучения учеными всего мира. В машиностроении они упростили составление планов сложных деталей, сократив время работы и получив более точные модели. При проверке они упрощают сравнение геометрии компонента с течением времени для обнаружения деформаций, помогающих предотвратить отказ.
В настоящее время 3D-сканеры являются незаменимым инструментом во многих областях. Развитие новых методов, таких как структурированный свет, привело к появлению новых 3D-сканеров, которые предлагают высокое разрешение и точность в сочетании с высокой скоростью сбора данных и экономичной ценой. Примерами могут служить новые сканеры Calibry и Calibry Mini или серия EinScan от Shining.
3D печать