


Умные города:использование лидара в интеллектуальных транспортных системах
Одним из аспектов повестки дня умных городов является развертывание интеллектуальных транспортных систем. Пилотный проект с использованием лидарных датчиков в Муниципальном транспортном агентстве Сан-Франциско (SFMTA) продемонстрировал, как лидар предоставил решение для пилотной городской системы умных светофоров, являющейся частью политики Сан-Франциско Vision Zero.
Целью городской политики Vision Zero является повышение безопасности дорожного движения, поскольку считается, что ежегодно около 30 человек гибнут и еще более 200 получают серьезные травмы, путешествуя по улицам Сан-Франциско. Задача пилотного проекта интеллектуальных сигналов светофора в этой более широкой структуре состояла в том, чтобы изучить возможность использования мультимодальных интеллектуальных систем светофоров (MMITSS), выделенной связи ближнего действия (DSRC), приоритета транзитных сигналов (TSP) и приоритетного предупреждения транспортных средств (EVP). ) технология для предоставления приоритета аварийным и транзитным транспортным средствам. Кроме того, MMITSS также должна иметь возможность обнаруживать пешеходов и велосипеды, чтобы предоставлять им интервалы опережения, схватки и / или защищенное фазирование.
Первое доказательство концепции, завершившееся в январе 2020 года, развернуло лидарные датчики на пяти перекрестках и продемонстрировало способность точно и анонимно профилировать данные с точностью 96%. Второе подтверждение концепции предполагает добавление уровня данных в сеть управления сигналами, чтобы обеспечить «интеллект» в ITS; этот процесс уже ведется, и ожидается, что он завершится в начале 2021 года.
Мы поговорили с двумя участниками, которые пролили свет на технологию, ее развертывание и полученные результаты, и здесь мы представляем основные моменты бесед. Сначала мы поговорили с Энцо Синьором, директором по маркетингу компании Quanergy, занимающейся производством лазерных сенсоров. Затем мы углубились в фактическое подтверждение концепции проекта с Полом Хекстра, который был независимым консультантом по реализации стратегии проекта с SFMTA.
Лидар:отслеживание идентификаторов объектов анонимно
Энцо Синьоре из Quanergy объясняет преимущества лидарной технологии в этом типе приложений, требующих подсчета людей и транспортных средств и управления потоками, и особенно с запретом на распознавание лиц.
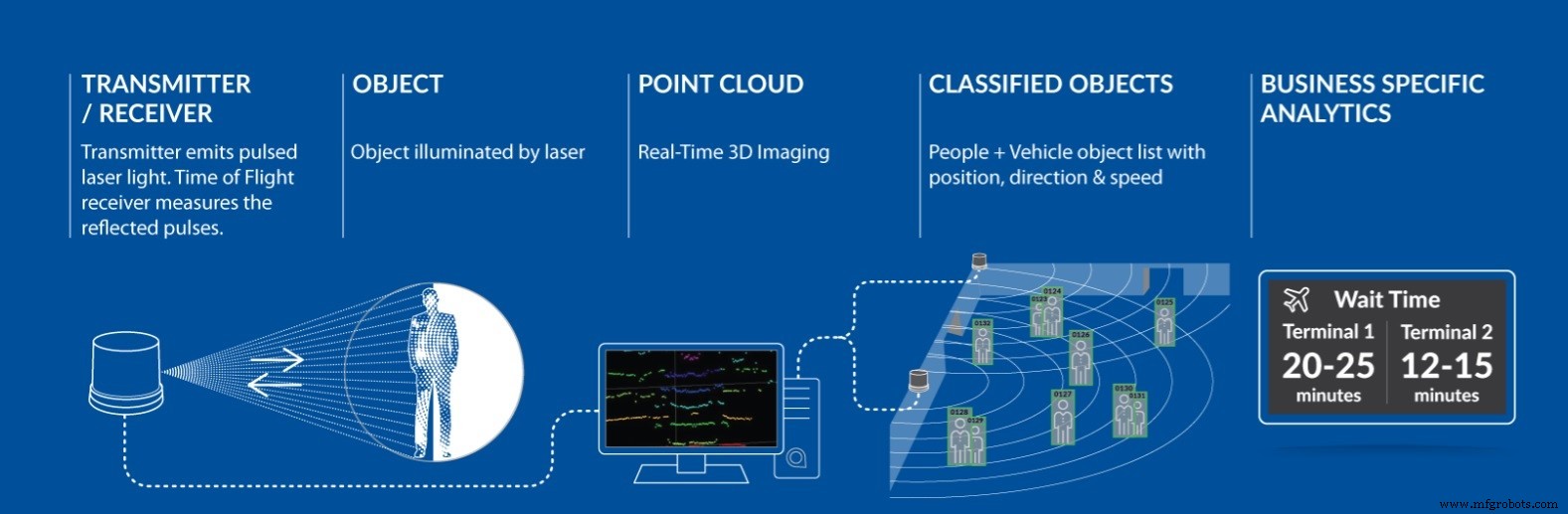
Ключевым преимуществом лидарной технологии в таких приложениях, как стадионы и умные города, является возможность анонимно отслеживать объект, перемещающийся по различным точкам датчиков. Например, машина будет проезжать через множество перекрестков или пешеход пройдет через множество участков. Что Quanergy может сделать, так это присвоить объекту идентификатор, и этот идентификатор будет оставаться с объектом на протяжении всего пути в контролируемой области.
Это очень сложно сделать, потому что, когда вы проходите через несколько перекрестков, вам нужно несколько датчиков и несколько серверов для граничных вычислений. Большинство технологий будут иметь разрозненное представление только о той области, которой они управляют, и при пересечении границы между одной областью и другой идентификатор будет потерян, и вам будет предоставлен другой идентификатор. При таком подходе вы начинаете терять из виду весь поток людей.
У нас есть технология, называемая автоматической передачей идентификаторов, которая передает идентификатор человека или транспортного средства из одной области в другую. Итак, пока у нас есть поле зрения, у объекта будет оставаться тот же идентификатор. Это дает очень хорошую сквозную видимость и отслеживание. Это может быть важно для аэропортов, например, от обочины до выхода на посадку, где вы можете оптимизировать обслуживание пассажиров, а также для торговых центров и городов. Единый идентификатор для каждого человека помогает включить сквозную аналитику.
Датчики Quanergy серии M обеспечивают обнаружение на большом расстоянии, например MQ-8, разработанный специально для приложений управления потоками. Вот чем отличаются эти датчики. Типичные лидарные датчики имеют симметричную конфигурацию луча. Если вы установите датчик плоско, то обычно половина луча уходит в небо, а половина - на землю. Если он установлен на высоте 3 метра на уличном фонарном столбе с видом на пешеходов, то в этой конфигурации половина луча тратится впустую.
В нашем дизайне все лучи на самом деле направлены вниз, что дает возможность иметь симметричное покрытие земли. Это означает, что когда человек проходит через поле зрения, слепых зон не возникает. Это дает возможность непрерывно отслеживать человека или транспортное средство в любой точке поля зрения. Мы можем видеть объект на расстоянии до 70 м (т. Е. 15 000 кв. М). Это очень большая территория, для которой в противном случае потребовалось бы много камер для достижения аналогичного покрытия. Следовательно, уменьшается количество датчиков, а также стоимость.
Решение проблем с конфиденциальностью, связанных с распознаванием лиц
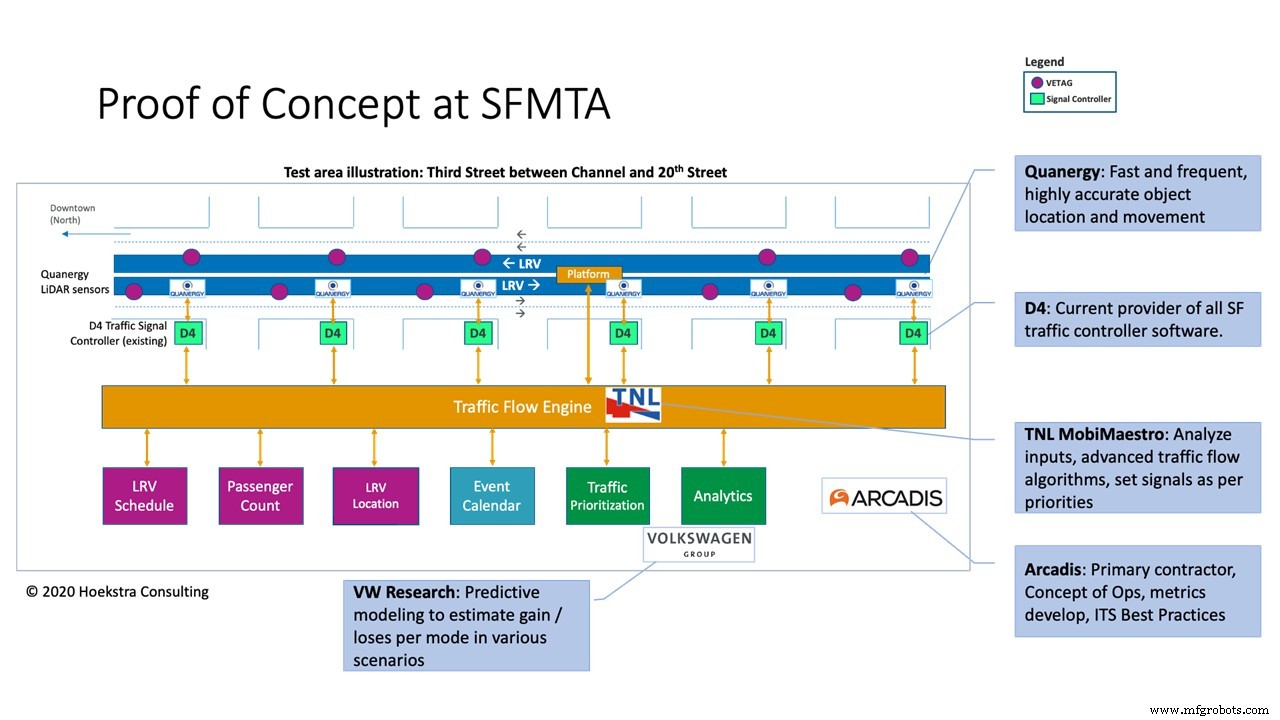
Пол Хекстра, для SMTA , описывает мысли, лежащие в основе реализации и результат первого доказательства концепции (PoC) на пяти пересечениях на 3 rd Улица и планы по расширению охвата.
Мы начали работать с SFMTA, Cisco и Quanergy в качестве партнеров по этому проекту в апреле 2019 года. Изначально в рамках пакета Cisco у нас были датчики DSRC. Мы обнаружили, что используем их только для того, чтобы прослушивать все машины в коридоре и на автостраде, которую мы проезжали. Мы обнаружили, что менее 1% всех автомобилей действительно транслируют этот сигнал DSRC. С точки зрения этого варианта использования следует сделать вывод, что вы не можете использовать DSRC для измерения потока трафика. Это просто недостаточно для принятия решений.
На данный момент мы завершили первую (PoC) с датчиками Quanergy, и теперь мы находимся в середине второй PoC.
С первой PoC мы взяли 20 лидарных датчиков, установили их на пяти перекрестках на 3 rd Улица, рядом с новым баскетбольным стадионом, который открылся в прошлом году. У нас были периферийные вычисления с Cisco TRX с программным обеспечением Quanergy QORTEX. Данные с лидара проходят через блок TRX, а программное обеспечение Qortex публикует данные в сети, которая поступает в центр обработки данных, небольшой кластер виртуальных машин, на котором работает платформа Cisco Kinetic, которая хранит все сообщения - все 30 миллионов в неделю.
Каждое воскресенье на нем публикуются отчеты, один для транспортных средств, идентифицирующий транспортное средство по идентификатору лидара на перекрестке, с целым набором атрибутов, таких как время, день недели, откуда он пришел, куда он ушел, как часто была остановка, как долго была остановка, какая была скорость, было ли событие (из календаря событий). Таким образом, мы могли соединить все перекрестки и следовать за транспортными средствами по коридору. И тогда мы могли бы сказать что-то вроде:«это количество, которое вошло в северном направлении с южной стороны коридора, а затем сколько свернуло и так далее».
С помощью Quanergy QORTEX мы откалибровали его и достигли точности 96%. Вы не можете просто подсчитывать идентификаторы с помощью лидара; вы должны построить логику, чтобы гарантировать, что на выходе будет тот же идентификатор, что и на входе. С такой логикой мы можем следовать за машинами через перекресток. У нас есть логика, которая определяет, что такое остановка. Следовательно, точность 96% - это то, на чем мы остановились, это очень точно. Для пешеходов с помощью определенных нами зон вы можете видеть, находится ли человек на тротуаре или нет. Вы можете видеть, находится ли человек внутри или за пределами пешеходного перехода. Вы можете увидеть, насколько близко к человеку находилась машина. Имея такие данные, мы можем создавать отчеты о возможных сбоях. Мы определили, что такое близкие промахи - векторы, скорость, а затем вычислили время их столкновения, и находится ли оно в определенном диапазоне, тогда вы называете это близким промахом.
Это возможно только потому, что данные, поступающие из QORTEX, настолько точны, что мы можем видеть, даже не идентифицируя кого-либо. Мы не храним личную информацию, позволяющую установить личность. Человек - это просто точка. А машина - это просто блок, вы не знаете, что это за машина. Классифицируем по размеру.
Первая PoC была посвящена анализу. Во втором мы увеличиваем количество перекрестков. Итак, теперь у нас пять, и мы собираемся перейти к 10. Другими словами, коридор побольше.
Затем мы сложим все данные, которые в настоящее время заблокированы внутри шкафов. В шкафах есть контроллер сигналов, а на контроллере много исполнительных механизмов. Это может быть петля для обнаружения транспортного средства, кнопка для пешехода или датчики на пути легкорельсового транспорта. Есть приоритезация сигналов светофора. Все это находится во встроенном контроллере сигналов.
Итак, сейчас мы обеспечиваем двусторонний обмен информацией с контроллерами сигналов, беря все данные с перекрестков, такие как данные лидара и классификация объектов (опять же полностью анонимно), на платформах и автобусных остановках. Классификация этих датчиков по объектам (которая обрабатывается датчиками) даст нам количество людей, а также их классификацию - например, есть ли кто-нибудь в инвалидной коляске, толкают ли люди коляску или они имея велосипед. Многие из этих факторов определяют время простоя транспортного средства. Мы хотим знать прогнозируемое время пребывания на основе количества людей.
Из серверной системы мы собираемся получить количество транспортных средств. А затем с помощью аналитики мы можем определить, нужно ли нам, скажем, 20 секунд времени ожидания или 32 секунды времени ожидания. Затем мы можем экстраполировать все 10 пересечений,
Рассмотрение всего транспортного коридора как сети
Чтобы оптимизировать весь коридор, мы не можем сделать это, не зная точно, где находятся люди и автомобили и как долго. Это означает, что мы рассматриваем весь коридор как сеть, а не как отдельный узел. Это означает, что мы запускаем алгоритмы с высокой частотой, и теперь мы обсуждаем, нужно ли нам работать быстрее, чем 1 герц, мы пересчитываем все каждую секунду.
Затем мы фактически говорим контроллеру сигнала, что вы должны идти зеленым на север. Это замыкает цикл. Изучая работу цепочки поставок от Cisco, вы знаете, что это единственный способ перемещать товары через перекресток. Доступна вся технология, но она оптимизирует только все силосы. Таким образом, мы делаем огромный шаг вперед с новой парадигмой интегрированного управления трафиком.
В Сан-Франциско уже 7000 камер. Но камеры дают только двухмерное изображение. Точность определения местоположения менее точна, чем та, которую можно получить с помощью лидара. Лидар работает всегда, в дождь, ночью. И это очень далеко от вопросов конфиденциальности. В тот момент, когда люди узнают, что их отслеживают или могут распознать, возникает проблема, когда люди не доверяют правительству, которое их защищает.
Результатом этого проекта является предоставление транспортных средств экстренной помощи приоритетным при реагировании на чрезвычайные ситуации, оптимизация времени транзита и остановок, и даже поднятие взвода автомобилей, если общественный транспорт недоступен, для более эффективного перемещения их по коридору.
Датчик
- Обоснование использования нейроморфных чипов для вычислений ИИ
- Случай C-suite для DDMRP
- Wi-Fi:серебряная пуля для Smart Everything
- Использование мощи умных городов для светлого будущего
- Аргументы в пользу возвращения домой американского производства
- Предприятия устанавливают сроки для интеллектуальных систем
- Пример использования 3D-печати в производстве
- Поиск окупаемости умного производства
- Материал для следующего поколения интеллектуальных датчиков
- Программное обеспечение для умного завода:преимущества аппаратно-независимого программного обеспечения