


Определение положения с помощью эффекта Холла:линейность и наклон отклика для конфигураций Slide-By
Узнайте о том, как различные решения, связанные с решениями для определения эффекта Холла, особенно для скользящих конфигураций, могут повлиять на ваши проекты.
Датчики на эффекте Холла позволяют эффективно определять положение. В датчиках Холла отсутствует механическое соединение между датчиком и подвижной частью, и, следовательно, может быть достигнута более высокая надежность и долговечность.
Существует несколько различных конфигураций магнитных датчиков, которые можно использовать в приложениях определения положения на основе эффекта Холла. В этой статье мы рассмотрим скользящую магнитную конфигурацию, которая может создавать линейную кривую зависимости Гаусса от расстояния. Мы также увидим, что можно использовать комбинацию магнитов для регулировки наклона кривой Гаусса в зависимости от расстояния.
Линейность может быть фактором принятия решения
В предыдущей статье мы рассмотрели простые конфигурации лобового и скользящего типов. Эти две схемы показаны на рисунке 1.
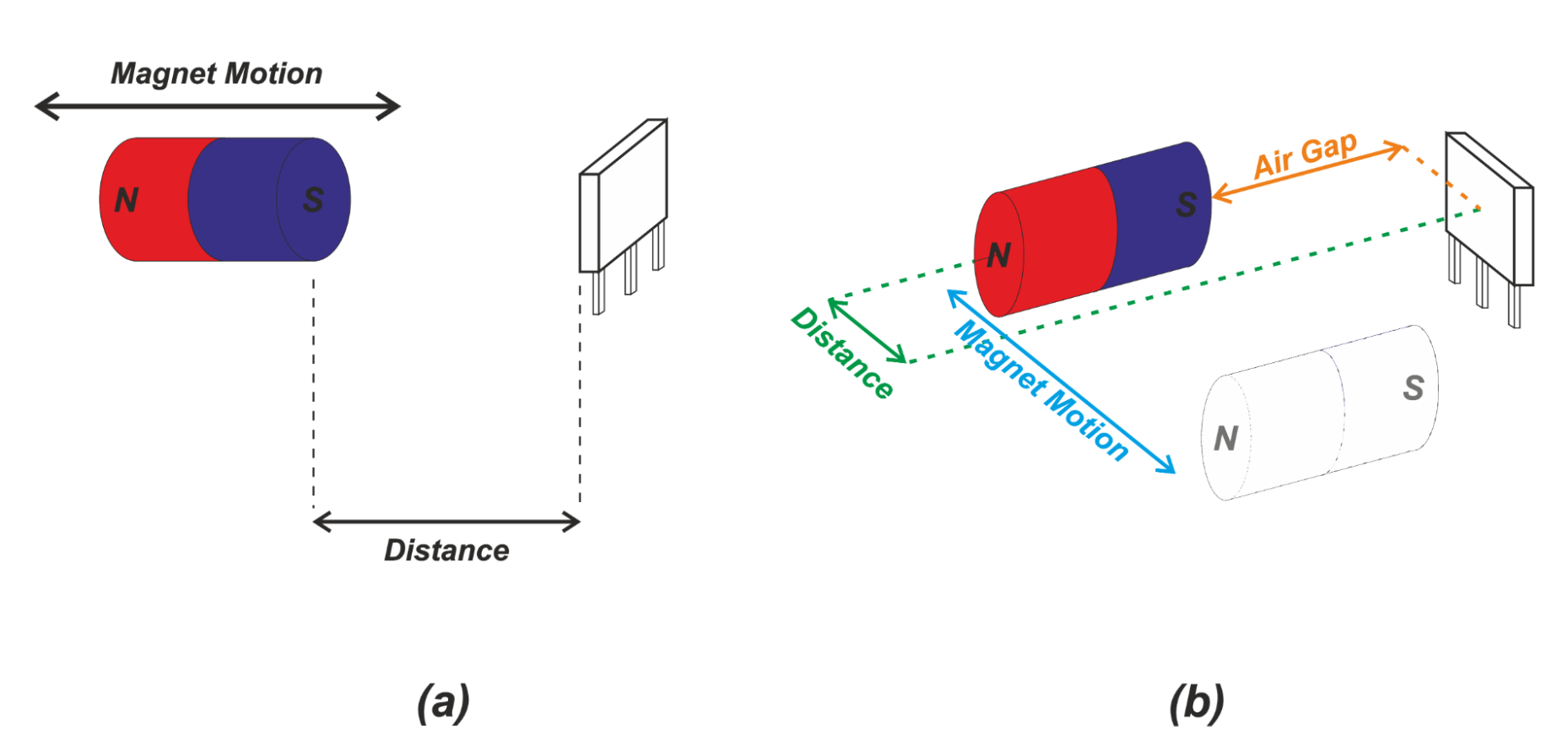
Рисунок 1 (а). В лоб и (b) скользящее зондирование.
Мы увидели, что связь между воспринимаемым полем и расстоянием нелинейна в вышеупомянутых схемах. Эти конфигурации магнитных датчиков обычно используются в качестве датчиков приближения в приложениях, где требования к точности не очень высоки.
Однако, когда требуется точный контроль положения на ходу считывания, мы предпочитаем иметь линейную зависимость между выходным сигналом датчика и смещением. Фактически, хотя мы можем использовать программное обеспечение для удаления ошибок линейности датчика, желательно иметь линейный отклик, поскольку он увеличивает точность измерения и облегчает калибровку системы.
Линейное определение скольжения
На рис. 2 (а) показана конструкция скользящего типа, которая демонстрирует линейную зависимость между z-составляющей измеренного магнитного поля и смещением магнита. На рисунке 2 (b) показана зависимость плотности магнитного потока (в направлении оси z) от перемещения магнита.
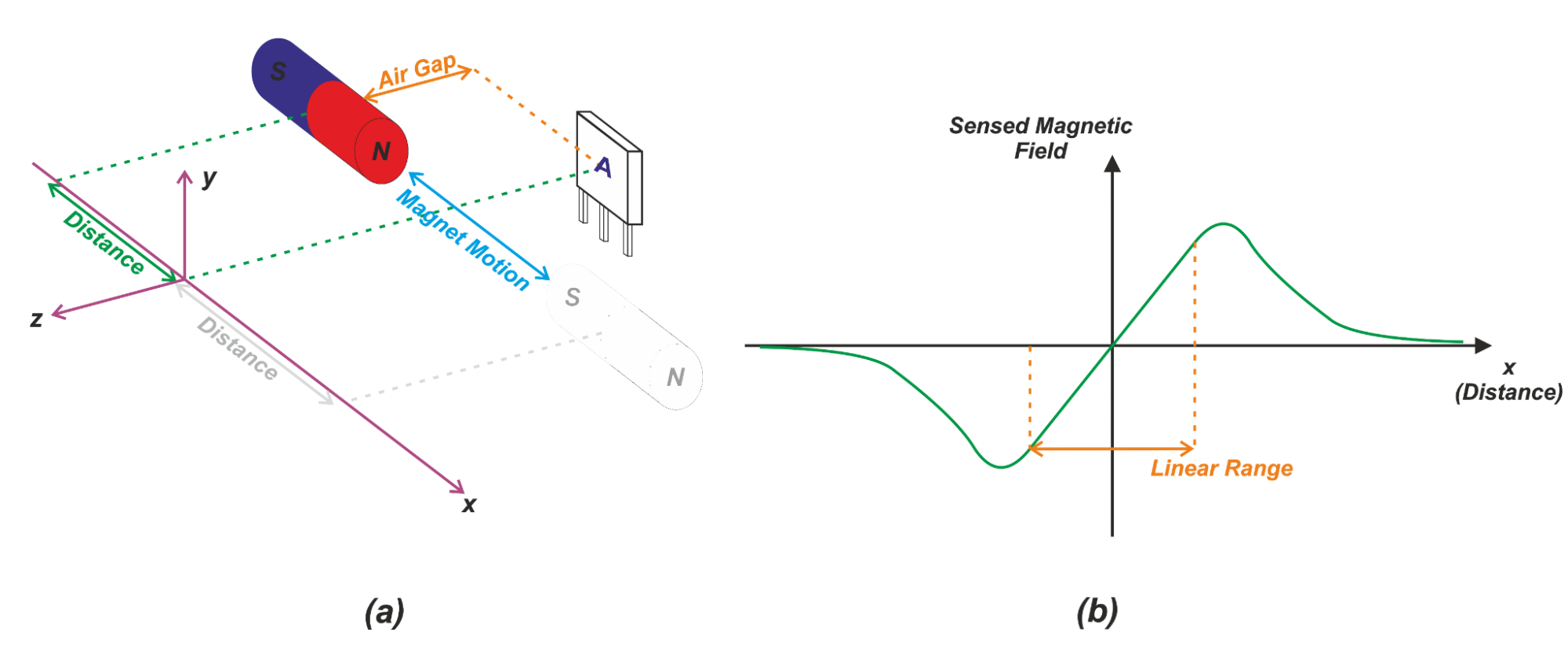
Рисунок 2 (а). Скользящая конфигурация с линейным откликом (b) зависимость плотности магнитного потока от положения магнита
Когда магнит находится слева от датчика (x <0), силовые линии магнитного поля магнита создают компонент в направлении, противоположном оси z. Обратите внимание, что силовые линии проходят от северного полюса к южному полюсу магнита.
На рисунке 3 показана одна из линий поля, проходящих через датчик.
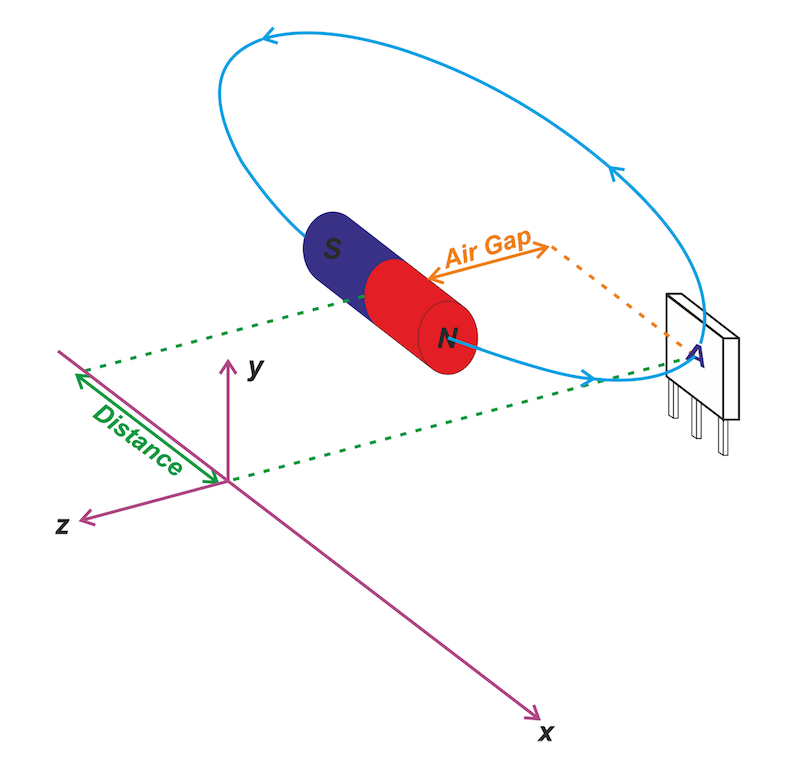
Рисунок 3. Направление силовых линий магнитного поля через датчик Холла
Следовательно, при x <0 z-компонента измеренного магнитного поля отрицательна. Когда магнит достигнет центрального положения, поле в направлении z будет равно нулю. Для положительного смещения (x> 0) магнитное поле будет создавать компонент в направлении оси z (положительное магнитное поле). При больших смещениях в любом направлении через датчик может пройти меньшее количество силовых линий. Следовательно, магнитное поле, воспринимаемое датчиком, уменьшается.
Одна из ключевых особенностей этого устройства состоит в том, что z-компонента магнитного поля имеет линейную зависимость от смещения вокруг начала координат. Этот линейный диапазон показан на рисунке 2 (b). Длина линейного участка немного меньше длины магнита. Например, для магнита 22 мм линейная область может простираться примерно от -10 мм до +10 мм. Такое линейное поведение позволяет нам более легко и точно определять положение движущегося объекта.
Что делать, если нам нужен больший линейный диапазон?
Мы можем использовать более длинный магнит, чтобы увеличить линейный диапазон вышеуказанной конфигурации; однако некоторые приложения не могут разместить в системе большой магнит. Кроме того, при использовании длинных магнитов ограничивающим фактором может быть стоимость. Если необходимо обнаружить ход, превышающий длину магнита, мы можем использовать массив датчиков для расширения диапазона измерения. Это показано на рисунке 4.
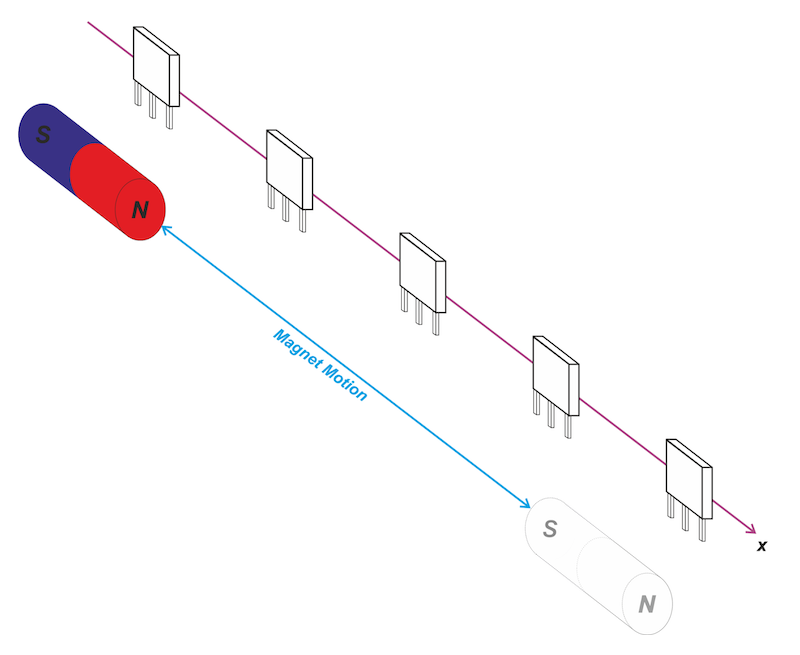
Рисунок 4. Использование нескольких датчиков на эффекте Холла для увеличения линейного диапазона
В этом случае нам нужно обработать данные от более чем одного датчика, чтобы определить положение объекта. Дополнительные сведения см. В этом примечании к применению TI.
Обнаружение наличия объекта
Конфигурация скольжения на рисунке 2 также может использоваться для обнаружения присутствия объекта (вместо определения положения объекта по его штриху). Предположим, что в примере, изображенном на рисунке 2 (а), магнит движется параллельно оси x слева направо. Предположим, что магнитные точки срабатывания и срабатывания нашего цифрового (ВКЛ / ВЫКЛ) датчика Холла показаны на рисунке 5.
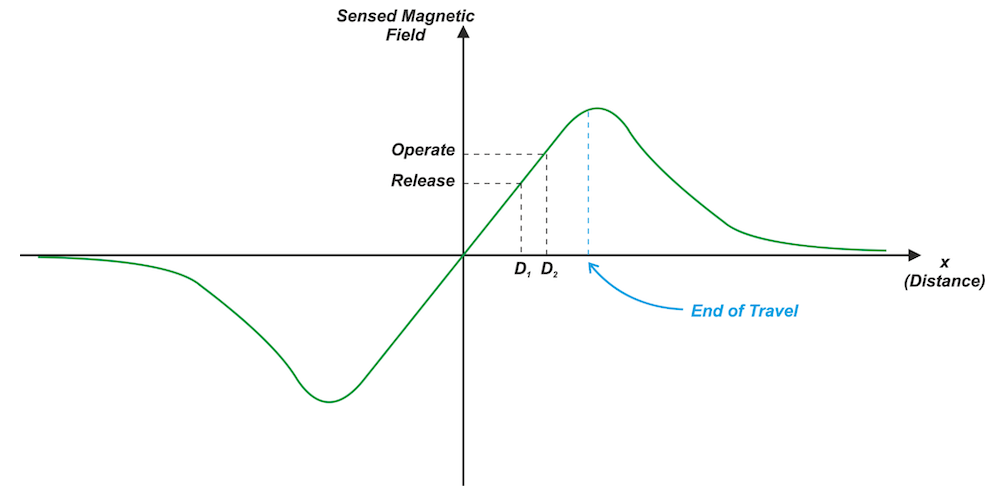
Рисунок 5. Использование скользящей конфигурации для обнаружения включения / выключения
По мере приближения магнита к датчику слева направо напряженность магнитного поля становится все больше. В точке D2 измеренное магнитное поле равно точке срабатывания магнитного поля, которая включает датчик. Приближение магнита к датчику приводит к еще большему магнитному полю и сохраняет датчик включенным.
Теперь, если мы перемещаем датчик в противоположном направлении (справа налево), магнитное поле уменьшается. В D1 магнитное поле становится меньше точки срабатывания, которая выключает датчик. Это позволяет нам обнаружить присутствие объекта. Мы также можем использовать эту структуру для определения контрольной точки (точки переключения датчика) в штрихе объекта.
Согласно кривой зависимости плотности магнитного потока от расстояния на рисунке 5, заданная плотность магнитного потока может быть получена двумя разными смещениями. Вот почему вышеупомянутое устройство обычно используется в приложениях, где механическая конструкция ограничивает конец перемещения объекта таким образом, что переключение датчика может происходить только при одном конкретном перемещении. Это предотвращает двусмысленность в интерпретации результатов.
Увеличение градиента кривой Гаусса в зависимости от расстояния
Выше мы обсуждали, что цифровой датчик (ВКЛ / ВЫКЛ) на эффекте Холла может использоваться с конфигурацией скольжения для определения контрольной точки в штрихе объекта. Если бы мы могли увеличить наклон кривой Гаусса в зависимости от расстояния, мы могли бы определять опорную точку с большей точностью.
При большем наклоне данное смещение приводит к большему изменению напряженности магнитного поля, которое может быть легче обнаружено датчиком. На рис. 6 (а) показана магнитная система, у которой наклон больше, чем у конфигурации на рис. 2 (а).
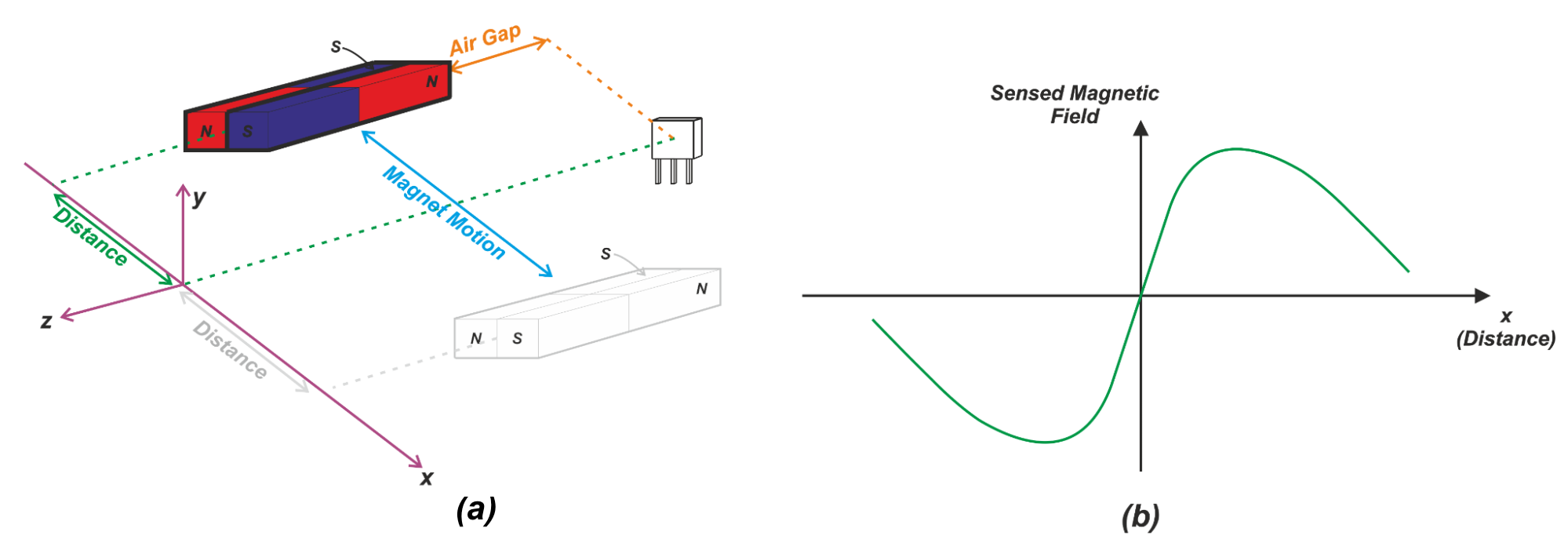
Рисунок 6. Использование нескольких магнитов для увеличения разрешения напряженности поля
В этом случае северный и южный полюса пары магнитов перемещаются по отношению к датчику. Общее поле определяется силовыми линиями обоих магнитов. В этом устройстве расстояние измеряется относительно центра магнитной пары. На рисунке 6 (b) показана зависимость z-компоненты измеренного магнитного поля от расстояния. В центральном положении (x =0) количество силовых линий от северного полюса одного магнита, проходящего через датчик, равно количеству силовых линий от южного полюса другого магнита. Следовательно, чистая плотность магнитного потока равна нулю.
Предположим, что мы перемещаем магнит вправо из центрального положения (x> 0). Это резко увеличивает количество силовых линий от южного полюса и создает магнитное поле с положительной z-компонентой. Точно так же, когда мы перемещаем магнит влево от центрального положения (x <0), мы получаем относительно сильное магнитное поле с отрицательной z-компонентой. Вокруг начала координат градиент кривой выше, чем у скользящей конфигурации на Рисунке 2 (а), потому что переход от северного полюса к южному происходит внезапно. Этот относительно больший наклон кривой зависимости Гаусса от расстояния может помочь нам определить исходное положение движущегося объекта с большей точностью.
Есть еще два интересных варианта этой сдвижной конфигурации. Одна версия разделяет два магнита на небольшое фиксированное расстояние. Это позволяет нам иметь менее резкий переход от северного полюса к южному и, следовательно, регулировать наклон отклика вокруг начала координат. В другой версии используется комбинация из трех магнитов. Это может создать симметричный отклик с большими наклонами в любом направлении. Симметричный отклик может быть полезен при обнаружении отклонения от центральной линии. Чтобы узнать больше об этих двух конфигурациях, обратитесь к руководству Honeywell «Измерение эффекта Холла и приложения».
Чтобы увидеть полный список моих статей, посетите эту страницу.
Датчик
- Датчик положения дроссельной заслонки - принцип работы и применение
- Future Electronics:платформа быстрой разработки для тепловидения и ИК-зондирования
- ADI:импеданс и потенциостат AFE для биологического и химического зондирования
- Infineon запускает монолитно интегрированный линейный датчик Холла для систем ASIL D
- Ambarella, Lumentum и ON Semiconductor совместно работают над трехмерным зондированием на основе искусственного интеллекта д…
- Мягкие сенсорные самовосстанавливающиеся материалы для роботизированных кистей и предплечий
- Круглый стол руководителей:датчики и IIoT
- Устройства фотоники на основе графена для дистанционного зондирования
- Соединения для управления:коммуникационные интерфейсы для датчиков положения и движения
- Обнаружение магнитных полей