


Коботы 2026:как работают коллаборативные роботы и почему они важны

Редакционная группа EVST · Последнее обновление:10 июня 2026 г.
Коллаборативный робот, или кобот, — это легкая промышленная рука, предназначенная для работы рядом с людьми без необходимости использования защитного ограждения. Это достигается за счет ограничения мощности и силы:датчики крутящего момента в каждом суставе распознают контакт и немедленно останавливают или втягивают руку, прежде чем столкновение может привести к травме. ISO/TS 15066 описывает четыре режима совместной работы, которые определяют допустимую близость между человеком и роботом. В 2026 году полезная нагрузка коботов обычно будет варьироваться от 3 до 30 кг, а радиус действия составит от 600 до 1800 мм.
Чем кобот отличается от обычного робота
Термин «совместный» относится к возможностям безопасности, а не к отдельному механическому классу. Кобот представляет собой 6-осевую шарнирно-сочлененную руку, оснащенную серводвигателями, редукторами и энкодерами на каждом суставе. Что отличает его от других, так это дополнительные датчики и контроль, которые позволяют ему безопасно использовать одно рабочее пространство, в сочетании с конструкцией, которая сводит к минимуму риск травм:закругленные края, малая движущаяся масса, отсутствие точек защемления и ограничение скорости.
Традиционные промышленные роботы созданы с учетом скорости, полезной нагрузки и повторяемости действий внутри охраняемой ячейки, при этом не предполагается присутствие человека в рабочей зоне. Коботы обменивают максимальную скорость и полезную нагрузку на возможность работать в общем пространстве, что, в свою очередь, меняет экономику развертывания:ячейка коботов может отказаться от ограждения, световых завес и пространства над головой, которое требуется для огороженной ячейки. Такая экономия средств является ключевым преимуществом для мелких и средних производителей. Структурированное описание типов коботов и критериев их выбора можно найти в нашем полном руководстве по типам, выбору и применению коботов, которое дополняет эту статью более глубоким погружением в механику безопасности.
Согласно отчету Международной федерации робототехники 2025 World Robotics, коллаборативные роботы остаются самым быстрорастущим сегментом рынка промышленных роботов по темпам роста единиц, хотя они по-прежнему составляют меньшинство от общего числа установок. Рост сосредоточен в сборке электроники, обслуживании машин и упаковке — областях, где вес деталей невелик, а близость человека к роботу полезна с оперативной точки зрения.
Как работает кобот:механика безопасности
Основная технология, которая позволяет использовать коботов, заключается в том, как они чувствуют и ограничивают силу контакта. В 2026 году будут доминировать три подхода, и большинство производственных коботов будут сочетать более одного.
Определение крутящего момента
Каждое соединение содержит датчик крутящего момента — или контроллер определяет крутящий момент на основе тока двигателя. Во время нормального движения контроллер знает ожидаемый профиль крутящего момента для запрограммированной траектории и запрограммированной скорости. Если измеренный крутящий момент превышает пороговое значение, контроллер интерпретирует это как неожиданную внешнюю силу, запускает защитную остановку и переводит рычаг в безопасное положение. Время реакции от контакта до остановки составляет порядка миллисекунд, благодаря чему сила контакта остается ниже порога травмы.
Ограничение мощности и силы (PFL)
PFL — наиболее распространенный метод сотрудничества. Робот спроектирован и сконфигурирован таким образом, что даже при наихудшем контакте передаваемая сила и давление остаются ниже биомеханических пределов, определенных в Приложении A ISO/TS 15066 для соответствующей области тела. Это достигается за счет малой движущейся массы, ограничения скорости, закругленной геометрии и описанного выше стопора, чувствительного к крутящему моменту. PFL позволяет многим коботам работать без ограждений и световых завес, поскольку сам робот действует как система безопасности.
Контроль скорости и разделения
В качестве альтернативы или дополнения внешние датчики безопасности, такие как лазерные сканеры, 3D-камеры или коврики безопасности, отслеживают положение оператора. Робот бежит на полной скорости, когда рядом никого нет, замедляется при приближении человека и останавливается при нарушении защитной дистанции. Это позволяет более быстрому и тяжелому роботу вести себя совместно, не жертвуя продуктивной скоростью, когда рабочее пространство свободно.
На практике самые чистые развертывания сочетают в себе методы:PFL в качестве базового уровня безопасности с многоуровневым мониторингом скорости и эшелонирования для восстановления пропускной способности в отсутствие оператора. Отраслевые наблюдения за развертыванием сборочной линии показывают, что кобот, настроенный исключительно для наихудшей скорости PFL, может потерять от 40% до 60% своей потенциальной производительности по сравнению с тем же манипулятором, которому разрешено работать быстро, когда рабочее пространство свободно — поэтому гибридные конфигурации теперь используются по умолчанию на линиях с большим объемом работы.
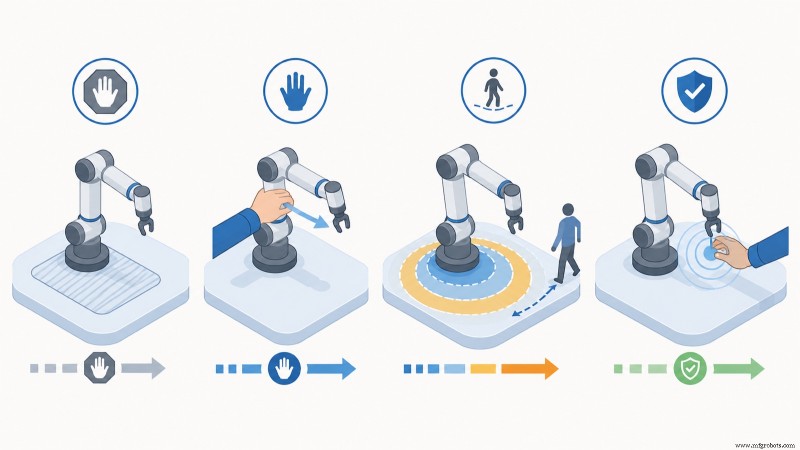
Четыре режима совместной работы в соответствии с ISO/TS 15066
ISO/TS 15066:2016 дополняет ISO10218 для совместной работы и определяет четыре различных метода совместной работы. Одно приложение может использовать один или комбинировать несколько. Понимание того, какой режим нужен приложению, — это первый шаг в выборе безопасной ячейки кобота.
| Режим совместной работы | Как это работает | Взаимодействие человека и робота | Типичное приложение |
|---|---|---|---|
| Контролируемая остановка с уровнем безопасности | Робот останавливается, когда человек входит в общее пространство; возобновляется, когда они уходят | Нет движения, пока в зоне совместной работы находится человек | Ручная загрузка/выгрузка ячейки робота, периодические задачи в общем пространстве |
| Ручное управление | Оператор физически перемещает руку с помощью ручного направляющего устройства; робот подчиняется приложенной силе | Прямое физическое управление, движение робота осуществляется оператором | Схемы обучения, вспомогательный подъем, позиционирование малообъемных деталей |
| Контроль скорости и разделения | Скорость робота зависит от расстояния до оператора, измеряемого датчиками безопасности | Сосуществование с динамическим снижением скорости, полной остановкой на минимальном расстоянии | Смешанные ячейки, в которых люди и роботы работают поочередно |
| Ограничение мощности и силы | Контактная сила и давление удерживаются ниже биомеханических пределов благодаря конструкции и контролю | Прямой контакт разрешен; робот останавливается из-за неожиданной силы | Совместная сборка, обслуживание машин, упаковка рядом с операторами |
ISO/TS 15066 распределяет биомеханические ограничения по областям тела:ограничения для лица и черепа гораздо более строгие, чем для плеча или кисти, что отражает тяжесть потенциальной травмы. Правильная оценка риска сопоставляет части пути робота, где возможен контакт, с областями тела, с которыми можно контактировать, а затем проверяет, что сила и давление остаются ниже соответствующего предела. Вот почему кобот, «безопасный» для одного приложения, не является автоматически безопасным для другого:изменение инструмента, детали или макета меняет сценарии контакта.
Анатомия кобота:компоненты и характеристики
Спецификация кобота напоминает спецификацию небольшого промышленного робота с некоторыми дополнениями, специфичными для совместной работы. Наиболее важные параметры при выборе:
- Полезная нагрузка - максимальная масса на фланце инструмента, включая захват или инструмент. Полезная нагрузка коботов 2026 составляет 3, 5, 6, 10, 12, 16, 18, 20 и до класса 30 кг.
- Охват — радиус рабочей зоны, обычно от 500 мм до 1800 мм. В рамках семейства продуктов охват и полезная нагрузка соотносятся друг с другом.
- Повторяемость — насколько точно рука возвращается в заданную точку, обычно от ±0,02 мм до ±0,1 мм в зависимости от размера. Повторяемость определяет последовательность, а это то, что нужно большинству задач по сборке и обслуживанию.
- Степени свободы — шесть — стандартно для общих 3‑D задач; семиосные коботы обеспечивают гибкость в работе в загроможденных пространствах.
- Инструментальный фланец и ввод-вывод — монтажный интерфейс и электрические/пневматические соединения для захватов и датчиков, часто проходящие через запястье.
- Функции, отвечающие требованиям безопасности — настраиваемые зоны безопасности, ограничения скорости, ограничения усилия и контролируемая остановка с номинальным уровнем безопасности — все сертифицировано в соответствии с уровнями функциональной безопасности ISO10218-1 и IEC61508/62061.
Возможности совместной работы заключаются в основном в контроллере и совместном распознавании, а не в отдельном видимом компоненте. Вот почему две руки с одинаковой полезной нагрузкой и радиусом действия могут существенно отличаться по безопасности и скорости:разница заключается в контроллере безопасности, разрешении датчика и настройке обнаружения столкновений.
Где применяются коботы
Коботы процветают в приложениях, где вес деталей невелик, человеческая близость полезна, а гибкость в перераспределении руки важнее, чем пиковое время цикла. Наиболее распространенные семейства приложений в 2026 году:
Обслуживание машин
Погрузка и разгрузка станков с ЧПУ, литьевых прессов и листогибочных прессов. Кобот выбирает заготовку, загружает станок, ждет цикла и выгружает готовую деталь. Поскольку оператор все еще может получить доступ к машине, когда кобот остановлен, ячейка остается гибкой. Обслуживание машин — крупнейшее по количеству установленных приложений коботов.
Сборка и завинчивание
Повторяющиеся задачи по креплению, вставке и сборке, часто выполняемые человеком, который выполняет шаги, требующие принятия решений. Коботы с силовым управлением превосходно справляются с задачами по вставке (запрессовка, защелкивание), где запрограммированный профиль силы предотвращает повреждение детали.
Упаковка и паллетирование
Конечная упаковка коробок и легкая паллетизация. Паллетайзеры Cobot перемещают коробки до грузоподъемности манипулятора, формируя устойчивые стопки на поддоне. В более тяжелых случаях полезная нагрузка становится ограничивающим фактором, и ее берет на себя обычный робот-укладчик.
Проверка качества и автоматизация лабораторий
Коботы, оснащенные камерой или датчиками, выполняют повторяющиеся проверки, а в лабораториях они обрабатывают образцы, пипетки и обслуживают инструменты. Планировка без ограждений подходит для помещений, где люди и оборудование находятся на тесных скамейках.
Сварка и обработка поверхности
Кобот-сварка быстро получила распространение в мастерских, где короткие швы и малые объемы не оправдывают использование огороженной сварочной камеры. Коботы также выполняют шлифовку, полировку и удаление заусенцев с контролем силы. Как описано в нашем руководстве по сварочным роботам для тяжелой промышленности, для продолжительной крупномасштабной сварки тяжелых деталей 6-осевой манипулятор с ограждением остается подходящим инструментом.
Опасные и экстремальные условия
Взрывозащищенные коботы расширяют возможности совместной работы в средах с легковоспламеняющимися газами, например, на химических, лакокрасочных и энергетических объектах. Для этого требуются сертифицированные корпуса, а не стандартные корпуса для коботов. Подробности сертификации см. в нашем специальном руководстве по взрывозащищенным коботам для опасных сред.
Кобот против промышленного робота:когда выигрывает каждый
Выбор между коботом и обычным промышленным роботом — это прикладное решение, а не вопрос о том, какая технология является более продвинутой. Матрица ниже демонстрирует компромисс.
| Фактор | Коллаборативный робот | Обычный промышленный робот |
|---|---|---|
| Полезная нагрузка | Обычно от 3 до 30 кг | от 5 до 800+ кг |
| Скорость | Ограничено в целях безопасности; быстрее с контролем разделения | Высокая, оптимизирована по времени цикла |
| Защита | Часто без ограждения после оценки риска | Огороженная камера, световые завесы, блокировки |
| Площадь | Компактный, не занимающий площадь | Больше, включает периметр безопасности |
| Перераспределение | Быстро; руку можно перемещать между задачами | Медленнее; ячейка является полупостоянной |
| Подходит | Низкая полезная нагрузка, большое количество задач, связанных с участием человека | Большой объем, высокая полезная нагрузка, устойчивый цикл |
Полную схему принятия решений см. в нашем сопутствующем анализе:кобот или промышленный робот:что следует выбрать вашему заводу в 2026 году. Короче говоря, кобот выигрывает, когда полезная нагрузка невелика, планировка выигрывает от совместного использования пространства с людьми, а линия часто меняется; обычный робот выигрывает, когда объем и полезная нагрузка высоки, а ячейку можно выделить.
Безопасное развертывание кобота:оценка рисков
Распространенным заблуждением является то, что кобот «безопасен сразу после распаковки». Манипулятор создан для совместной работы, но приложение в целом — манипулятор плюс инструмент, деталь, макет и задача — должно быть оценено и сертифицировано. В соответствии с ISO10218-2 и ISO/TS15066 интегратор (часто конечный пользователь) несет ответственность за оценку рисков всего приложения для совместной работы.
- Определить опасности. Нанесите на карту каждую точку на пути робота, где возможен контакт с человеком, а также опасные инструменты (острые захваты, рабочие органы с горячими концами) и обрабатываемую деталь.
- Классифицировать режим совместной работы. Решите, какой из четырех режимов ISO/TS15066 использует задача и для каких фаз цикла.
- Проверьте биомеханические пределы. Для работы с ограничением мощности и усилия убедитесь, что контактная сила и давление для каждого возможного контакта остаются ниже предела Приложения А для этой области тела, путем расчета или измерения с помощью устройства для испытания на силу и давление.
- Настройте функции безопасности. Установите ограничения скорости, силы и зоны в контроллере безопасности и проверьте их.
- Задокументируйте и проверьте. Запишите оценку, сверьте с ней построенную ячейку и проводите повторную оценку при каждом изменении инструмента, детали или компоновки.
На практике, когда инженеры по применению EVST вводят в эксплуатацию совместную ячейку на месте, наиболее частым обнаружением во время проверки является то, что захват или деталь с острыми краями создают контактное давление, превышающее предел, указанный в Приложении А, даже если сам рычаг находится в пределах силы. Исправление обычно заключается в изменении конструкции захвата, защите кромок или снижении скорости на затронутом участке пути, а не в смене робота. Именно этот шаг покупатели чаще всего недооценивают, когда полагают, что кобот устраняет необходимость в технике безопасности.
Линейка коллаборативных роботов EVST
Компания EVST со штаб-квартирой в Чэнду и производством в Вэньлине за семь лет поставила системы автоматизации более чем в 100 стран. Линейка роботов для совместной работы охватывает полезную нагрузку от 3 до 30 кг. Опубликованные модели включают манипулятор массой 3 кг/620 мм, манипулятор массой 6 кг/917 мм, манипулятор массой 12 кг/1300 мм и манипулятор массой 18 кг/900 мм. EVST также производит взрывозащищенного коллаборативного робота для опасных сред и линию коботов для предприятий общественного питания, наряду с традиционными промышленными роботами QJAR, SCARA и семействами продуктов Delta.
Производственная линия EVST имеет сертификат качества автомобильного уровня IATF16949, а ее продукция сертифицирована сторонними организациями CE, SGS и TUV. Взрывозащищенный кобот рассчитан на использование в легковоспламеняющихся атмосферах, что расширяет совместную работу в средах, в которые не могут проникнуть стандартные корпуса коботов. Компания также владеет одним выданным патентом на изобретение (CNZL202011601091.6), четырьмя патентами на изобретения, находящимися в стадии экспертизы по существу, и двумя авторскими правами на программное обеспечение, поддерживаемыми сетью полевых инженеров, охватывающей более 100 стран, для ввода в эксплуатацию на месте и поддержки оценки рисков.
Часто задаваемые вопросы
Что такое коллаборативный робот простыми словами?
Коллаборативный робот — это роботизированная рука, созданная для безопасной работы рядом с людьми без защитного ограждения. В его суставах используются датчики крутящего момента для обнаружения контакта и быстрой остановки. Он имеет малую массу, ограниченную скорость и закругленные поверхности, поэтому любой контакт остается ниже пределов силы и давления, которые могут привести к травме, как определено в ISO/TS15066.
Действительно ли коботам не нужен защитный забор?
Часто, но не автоматически. Необходимость ограждения зависит от оценки риска всего применения, руки и ее инструмента, детали и задачи. Многие низкоскоростные приложения с малой полезной нагрузкой после оценки работают без ограничений. Но острый инструмент, тяжелая деталь или деталь с острыми краями или требование высокой скорости могут потребовать дополнительной защиты или контроля скорости и разделения. Кобот обеспечивает планировку без ограждений; оценка риска подтверждает, является ли он допустимым.
Какая полезная нагрузка и радиус действия мне нужны для кобота?
Добавьте вес детали и вес захвата к размеру полезной нагрузки и оставьте запас примерно от 20% до 30%. Для машинного обслуживания мелких деталей обычно используется рука весом от 5 до 10 кг; для паллетирования или более тяжелых погрузочно-разгрузочных работ от 16 до 30 кг. Вылет должен охватывать весь рабочий диапазон задачи:обычно от 600 до 1300 мм для настольных работ и работ по обслуживанию оборудования и больше для укладки на поддоны.
В чем разница между ISO10218 и ISO/TS15066?
ISO10218 (части 1 и 2) — это основной стандарт безопасности для промышленных роботов и их интеграции. ISO/TS15066 — это техническая спецификация, которая дополняет ее специально для совместной работы, добавляя четыре режима совместной работы, а также пределы биомеханической силы и давления в Приложении А. Совместное приложение должно удовлетворять обоим требованиям. Подробную информацию, ориентированную на покупателя, можно найти в нашем руководстве по стандартам безопасности коботов на сайте продукта EVST.
Как быстро может двигаться кобот?
В режиме с ограничением мощности и силы скорость кобота ограничена, поэтому в худшем случае контакт остается в биомеханических пределах, часто значительно ниже, чем у обычного робота. Благодаря мониторингу скорости и разделения одна и та же рука может двигаться вблизи своего механического максимума, когда в защитной зоне нет оператора, а затем замедляться или останавливаться при приближении человека. Гибридные конфигурации восстанавливают большую часть потерянной пропускной способности, сохраняя при этом совместную безопасность.
Что делать дальше
Чтобы сопоставить конкретного кобота с требованиями к полезной нагрузке и радиусу действия, а также указать путь к предложению, см. руководство на сайте продукта EVST по выбору полезной нагрузки для совместного робота от 3 до 30 кг. Подробные сведения о стандартах безопасности, необходимые покупателям, прежде чем выбирать ячейку без ограждения, см. в разделе «Стандарты безопасности коботов, разъясненные для покупателей». Чтобы принять более широкое решение о создании или покупке, прочтите статью «Кобот против промышленного робота», а чтобы оценить прибыль, воспользуйтесь нашим калькулятором рентабельности инвестиций в кобот для производства малого и среднего бизнеса. По вопросам закупок с отделом продаж EVST можно связаться через страницу контактов.
Об авторе:Редакция EVST пишет о промышленной робототехнике и интеллектуальном производстве для инженеров и руководителей предприятий, оценивающих проекты автоматизации. Компания EVST (EVSTECHCO.,LTD), основанная в Чэнду в 2018 году, реализовала более 600 проектов автоматизации и осуществляет поставки в более чем 100 стран. Она имеет сертификат автомобильного уровня IATF16949 и сертификаты сторонних производителей CE/SGS/TUV для семейств продуктов QJAR, коллаборативных роботов, SCARA и Delta.
Промышленный робот
- ИИ в реальной робототехнике
- Преимущества роботов
- Роботизированная автоматизация в стиле Цинциннати
- Роботизированная паллетизация — эргономичное решение
- Представляем:пакет программного обеспечения Meca-RoboDK
- Совместная безопасность роботов
- Универсальный магазин контроллеров роботов Fanuc
- Рекомендуемые роботы Scara:список из 12 лучших брендов производителей роботов Scara
- Производители бытовой техники ищут роботов для повышения производительности
- Как реализовать распознавание цифр с помощью TensorFlow Lite с использованием микроконтроллера кроссовера i.MX RT1060