


Как разработать контроллер нечеткой логики
Контроллеры с нечеткой логикой буквально повсюду вокруг нас. От антиблокировочной тормозной системы до стиральных машин, которые чистят нашу одежду. Но действительно ли они работают? И каковы преимущества их использования?

Рисунок 1. Современная обработка часто зависит от нечеткой логики для управления критическими аспектами процесса. Изображение любезно предоставлено Майклом Шварценбергером
Релейная логика и нечеткая логика
Хорошей отправной точкой в изучении элементов управления нечеткой логикой является определение совместимости релейной логики с нечеткой логикой. Релейная логика - это широко используемый подход, основанный на правилах, для программирования ПЛК (программируемых логических контроллеров), когда требуется последовательная логика. Каждая ступень в программе релейной логики представляет собой логическое уравнение, которое может быть двоичным или дискретным.
Имея в виду, что релейная логика читается слева направо, сверху вниз, тогда крайняя правая сторона ступени представляет условие вывода. Условие вывода этой ступени зависит от результата символов релейной логики слева от вывода.
В качестве базового примера возьмем одну ступеньку, показанную на рисунке 2. Обратите внимание, что кондиционер (кондиционер) активен только тогда, когда переключатель активен, и активен либо HighTemp, либо Humid.
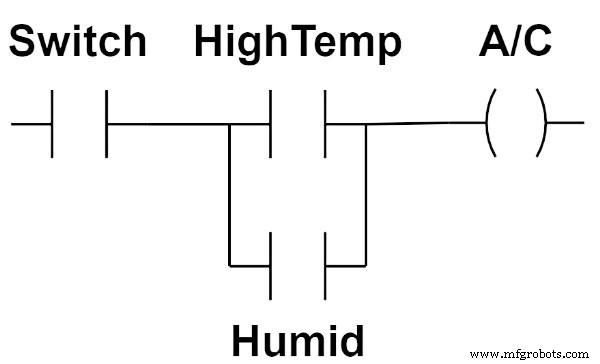
Рисунок 2. Ступенька лестничной логики для управления системой кондиционирования. Информация предоставлена Википедией
Как правило, эта ступенька принимает следующую форму:
A / C =Switch AND (HighTemp OR Humid)
Поскольку релейная логика может быть выражена в виде правил, она легко поддается внедрению в управление с нечеткой логикой. Другой способ думать об этом заключается в том, что результат зависит от условий ЕСЛИ, представленных символами релейной логики слева, в то время как выход представляет собой результат ТОГДА.
ЕСЛИ (переключатель И [высокая температура ИЛИ влажность]) ТОГДА A / C
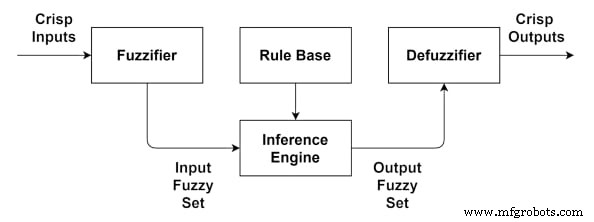
Рисунок 3. Блок-схема, представляющая систему с нечеткой логикой.
Этот подход, безусловно, можно реализовать с помощью правил нечеткой логики. В таком случае четкими входными данными будут температура и относительная влажность. Считывание этих значений датчиком будет преобразовано фаззификатором в нечеткие входные данные. Механизм вывода будет содержать, среди прочего, правило, показанное выше. Основываясь на правилах механизма вывода, дефаззификатору будет представлен нечеткий выходной набор. Отсюда четкие выходные данные будут передаваться в систему управления.
Короче говоря, релейную логику можно реализовать с помощью нечеткой логики.
Основные шаги по разработке контроллера нечеткой логики
Системы управления с нечеткой логикой (часто сокращенно FLC) представляют собой альтернативный подход к разработке и внедрению систем управления.

Рисунок 4. Простая система управления с обратной связью, реализующая нечеткое управление. Изображение любезно предоставлено Боффи Б.
Признайте связанные с этим допущения
Перед тем, как начать процесс проектирования FLC, необходимо сделать некоторые ключевые предположения.
- Существует решение проблемы управления.
- «Достаточно хорошее» решение приемлемо вместо «оптимального».
- Переменные входа, выхода и состояния можно наблюдать и использовать для управления.
- Свод знаний существует в форме:
- Лингвистические правила и / или
- Набор данных ввода-вывода, из которых можно извлечь правила.
- Конструкция FLC должна обеспечивать приемлемый диапазон точности.
- Стабильность и оптимальность не рассматриваются явно, но открыты.
Определите и настройте переменные для фаззификации
Первым шагом в разработке FLC является определение задействованных входных, выходных и переменных состояния. Затем определите нечеткие подмножества переменных. Например, ввод температуры может быть разделен на пять подмножеств с описательной лингвистической меткой для каждого:{‘холодный’ ’’ холодный ’‘ номинальный ’’ ’теплый’ ’горячий’}.
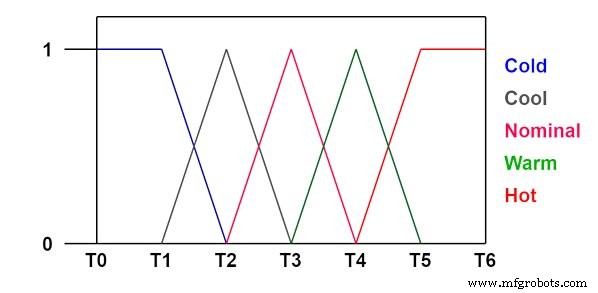
Рисунок 5. Пример использования функций принадлежности для представления температуры.
После того, как подмножества были выбраны для переменных, функции принадлежности должны быть настроены для представления этих подмножеств. Варианты функций принадлежности включают треугольную, трапециевидную, сигмовидную и гауссовскую. Это составляет фаззификатор который преобразует четкие входные данные в нечеткие значения. Обратите внимание, что нечеткие подмножества и связанные функции принадлежности также необходимо настроить для вывода механизма вывода . .
Создание правил нечеткой логики
Преобразование традиционного контроллера релейной логики в контроллер нечеткой логики начинается с создания правил нечеткой логики.
Ссылаясь на предположения, это может принимать форму лингвистических правил, которые уже существуют или могут быть разработаны с помощью специалиста в данной области. Правила также могут быть сгенерированы с учетом набора данных ввода-вывода. А в случае релейной логики правила нечеткой логики можно прочитать непосредственно из релейной диаграммы.
Результатом является база правил для нечеткой системы.
Реализация механизма вывода и дефаззификатора
Существует несколько различных подходов к реализации механизма вывода . . В элементах управления два самых популярных подхода - Мамдани и Сугено. Оба типа механизмов вывода комбинируют нечеткие выходные данные из базы правил с помощью оператора ИЛИ и впоследствии дефаззифицируют этот вывод, чтобы получить четкое значение.
Приложения контроллеров нечеткой логики
Контроллеры с нечеткой логикой нашли чрезвычайно широкое распространение. Например, лифты часто имеют контроллеры с нечеткой логикой, которые сокращают время ожидания, минимизируют перемещение между этажами и снижают потребление энергии. Дополнительным преимуществом минимизации перемещений между этажами является снижение износа критически важных компонентов и увеличение срока службы.
Еще один интересный пример нечетких систем управления - цифровые видеокамеры и видеокамеры. Операторы могут двигать или трясти камеру при съемке последовательного кадра, но управление нечеткой логикой может автоматически компенсировать это.
В промышленных условиях нечеткая логика часто используется для управления производственными процессами и системами. Например, нечеткая логика хорошо работает с контроллерами температуры и процесса, такими как те, которые используются при термической обработке металлов. Типичная термообработка включает высокоточные циклы нарастания и выдержки для достижения правильных металлургических свойств.
Аналогичные области применения, в которых используется FLC, включают вулканизацию резины или сушку растворителей на окрашенных поверхностях. Кроме того, все это примеры процессов управления, в которых обычно используется ПИД-регулятор (пропорционально-интегральная производная). Обработка с числовым программным управлением (ЧПУ) часто зависит от контроллеров с нечеткой логикой, как и многие автономные робототехники, машинное зрение и дистанционное зондирование.
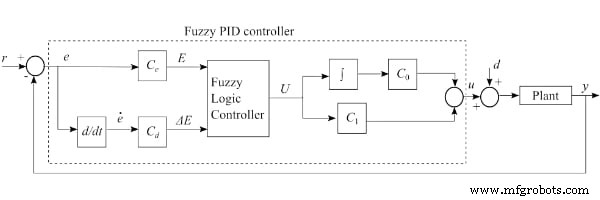
Рисунок 6. Блок-схема нечеткого ПИД-регулятора. Изображение предоставлено Mathworks
Преимущества и недостатки нечеткого логического управления
Управление с нечеткой логикой все еще может работать, когда сталкивается с неточными данными, а также с нелинейностью в системе. Он также позволяет интегрировать человеческий опыт и знания в систему управления и обладает широкими возможностями настройки. Системы управления с нечеткой логикой, как правило, дешевле в разработке по сравнению с более традиционными подходами и, как правило, более эффективны, устойчивы и надежны.
В частности, в средствах управления FLC не требует, чтобы модель и / или цель формулировались в точных терминах, как это требуется при более традиционном подходе к системам управления. Кроме того, нечеткие элементы управления можно легко комбинировать с другими системами управления.
Конечно, у использования нечетких систем управления есть свои недостатки. Хотя нечеткая логика является разновидностью искусственного интеллекта (ИИ), это не тип машинного обучения, поэтому он не может адаптироваться и учиться. Существуют адаптивные контроллеры нечеткой логики, но их конструкция и сложность намного превосходят обсуждаемый тип нечетких контроллеров.
Кроме того, в конечном итоге потребуется внести обновления в правила, от которых зависит контроллер, а контроллеры с нечеткой логикой потребуют обширного тестирования и проверки, прежде чем они будут сочтены готовыми к реализации.
Когда следует использовать контроллер с нечеткой логикой? Они являются отличным вариантом для решения чрезвычайно сложных задач управления, которые трудно представить с помощью точных моделей и объективов. Они хорошо работают, когда задействованы неточные данные и нелинейное поведение. Они также являются хорошим выбором, когда в систему можно внести человеческий опыт и знания. Как вы используете нечеткую логику в своей системе управления? Или вы используете только ПИД-регуляторы?
Промышленный робот
- Как создавать прозрачные пластиковые изделия
- Дизайн для технологичности:практическое руководство
- Как добавление антенны меняет процесс проектирования
- Как виртуальная реальность может помочь в разработке промышленных роботов
- Как документировать кабели и жгуты
- Как выбрать контроллер промышленной автоматизации
- Как выбрать контроллер
- Как устранить помехи при проектировании печатных плат
- Как оптимизировать дизайн HDI в электронике
- Как спроектировать живые шарниры с помощью 3D-печати