


Автоматическая сортировочная машина — Студенческий проект «Мехатроника»
<основной класс="главный сайт" id="главный">
Эта машина была создана в качестве студенческого проекта по предмету «Строительство и САПР» на факультете машиностроения в Скопье командой из пяти студентов.
Это машина, которая сортирует два типа пластин. В одной пластине есть отверстия, а в другой нет. Нашей задачей было разработать машину, которая будет автоматически сортировать эти пластины. Мы разработали это решение, которое заняло первое место среди 25 других машин.
Как это работает
Вот как работает автоматическая сортировочная машина:
- Формы подаются в машину вручную.
- Ролик выравнивает пластины так, чтобы они ложились в магазин пластин одна за другой.
- Когда пластина достигает дна сортировщика, срабатывает микропереключатель.
- Когда переключатель включен, загорается светодиод.
- Если в пластине есть отверстие, фотоэлемент будет получать больше света, и двигатель будет вращаться в одну сторону.
- Если в пластине нет отверстия, фотоэлемент будет получать меньше света, и двигатель будет вращаться в другую сторону.

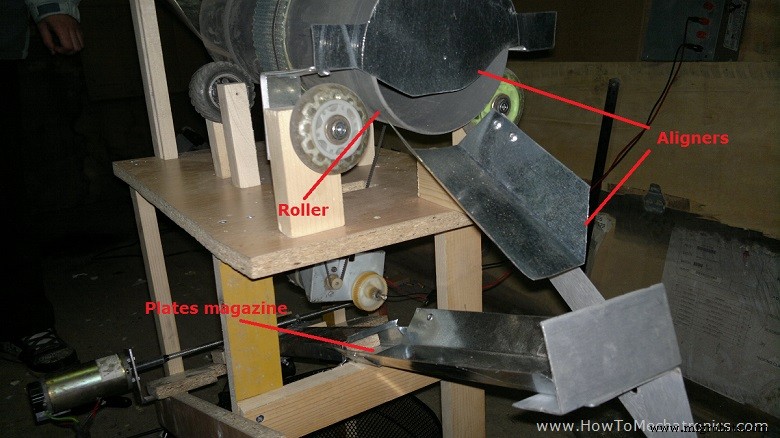
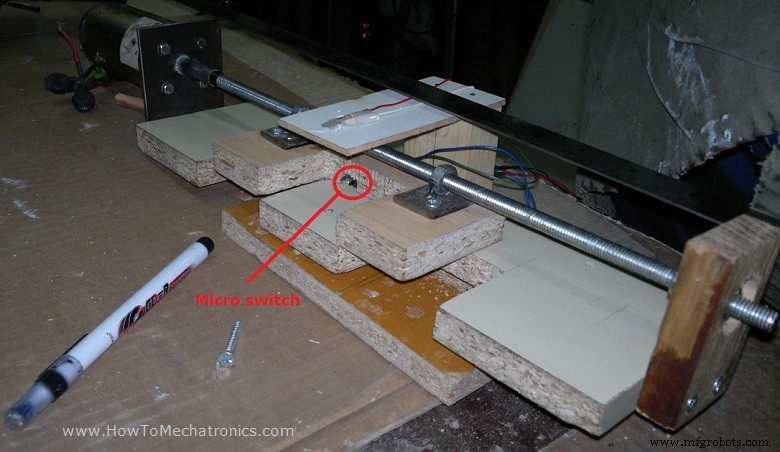
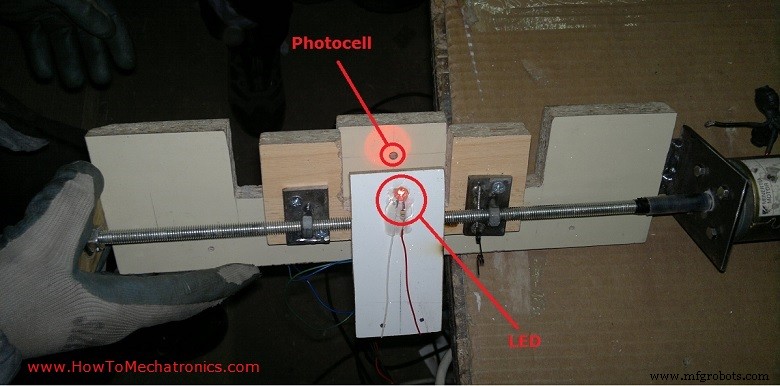
Схема цепи
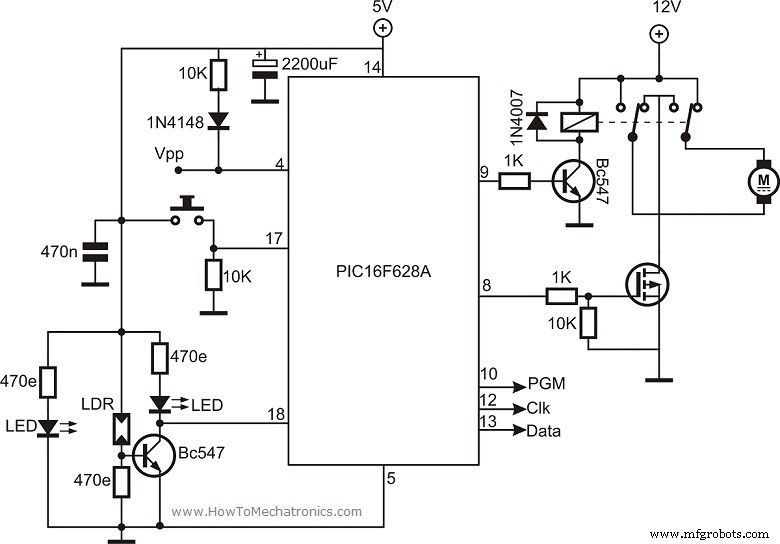
В машине используется микроконтроллер PIC16F628A, и она запрограммирована с помощью MikroElektronika.
Исходный код
/********************************************************************************/
/* Mechatronic Design Team */
/* Proekt po Konstruiranje i CAD */
/* "Dizajn i razvoj na nov ured za razdeluvanje na dva tipa plocki" */
/* */
/* */
/* */
/* Mikrokontroler: PIC16F628A */
/* Oscilator: Interen na 4MHz */
/* */
/* Dekemvri, 2012, Skopje */
/********************************************************************************/
void left () {
RB2_bit = 1; //motorot pocnuva da se dvizi na levo
delay_ms (500); // motorot se dvizi do krajna leva polozba
delay_ms (500);
delay_ms (500);
delay_ms (500);
PORTB = 0x00; //koga ke stigne do krajnata leva polozba se gasi
delay_ms (200); //vreme za kocenje na motorot
RB3_bit = 1; //se aktivira relejot za promena na nasokata
delay_ms (20);
RB2_bit = 1; //motorot pocnuva da se dvizi desno
delay_ms (500); //sredna pozicija na motorot
delay_ms (500);
delay_ms (500);
delay_ms (500);
PORTB = 0x00; //motorot se gasi koga ke dojde do sredina
delay_ms (150); //vreme za kocenje na motorot
}
//////////////////////////////////////////////////////////////////////////////
void right () {
RB3_bit = 1; //Se uklucuva relejot za promena na nasoka na motorot
delay_ms (30);
RB2_bit = 1; //motorot pocnuva da se dvizi desno
delay_ms (500);
delay_ms (500);
delay_ms (500);
delay_ms (500); //motorot se dvizi do krajna desna polozba
PORTB = 0x00; //koga ke stigne do krajna desna polozba se gasi
delay_ms (200); //vreme za kocenje na motorot
RB2_bit = 1; //motorot pocnuva da se dvizi levo
delay_ms (500); //sredna pozicija na motorot
delay_ms (500);
delay_ms (500);
delay_ms (500); //sredna pozicija na motorot
PORTB = 0x00; //motorot se gasi koga ke dojde do sredina
delay_ms (150); //vreme za kocenje na motorot
}
//////////////////////////////////////////////////////////////////////////////
void main() { //pocetok na glavna programa
TRISB = 0x00; //PORTB Izlezi
TRISA = 0xff; //PORTA Vlezovi
CMCON = 0x07; //gasenje na komparatori
do {
delay_ms (50);
PORTB = 0x00;
if (PORTA.b0==1) { //dali ima kocka?
delay_ms (100);
if (PORTA.b1==0) { //dali ima otvor?
left (); } //ako ima otvor dvizi se levo
else (right ()); }} //ako nema dvizi se desno
while (1); }Code language: Arduino (arduino)Производственный процесс
- Машина ЭЭГ
- Торговый автомат
- Машина для голосования
- Швейная машина
- Идеи проектов для вашего мини-станка с ЧПУ
- Автоматический сверлильный станок - обзор
- Что такое автоматический пресс?
- Автоматическая машина для шовной сварки – процесс шовной сварки
- Введение в автоматическую трубогибочную машину
- JW Машина