


Робот, управляемый жестами рук
Компоненты и расходные материалы
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 2 | |||
| × | 1 |
Приложения и онлайн-сервисы
 |
|
Об этом проекте
ОБНОВЛЕНИЕ:ОБНОВЛЕННУЮ ВЕРСИЮ ЭТОГО ПРОЕКТА МОЖНО НАЙТИ ЗДЕСЬ
Введение
Хотел бы я контролировать все своими руками! Сижу в кресле и контролирую вещи как БОСС. Мне бы это понравилось! Итак, я наконец-то представил классного робота для распознавания жестов рук, который может выполнять команды, сделанные с помощью жестов рук. Звучит безумно, но обещаю, это очень просто. Сделать робота для управления жестами на самом деле очень просто. Этот робот является улучшенной версией другого моего самостоятельного радиоуправляемого автомобиля, использующего радиочастотный модуль.
Здесь робот также разделен на две части:передатчик и приемник. Схема приемника такая же, как и на старой стойке, только небольшое изменение в схеме передатчика, здесь нам нужно запрограммировать схему передатчика. Поэтому я буду использовать Arduino в качестве платформы для программирования. Для распознавания сделанных жестов я буду использовать датчик акселерометра. Итак, приступим к строительству!
Посмотрите, как работает робот
Что это такое и как это работает?
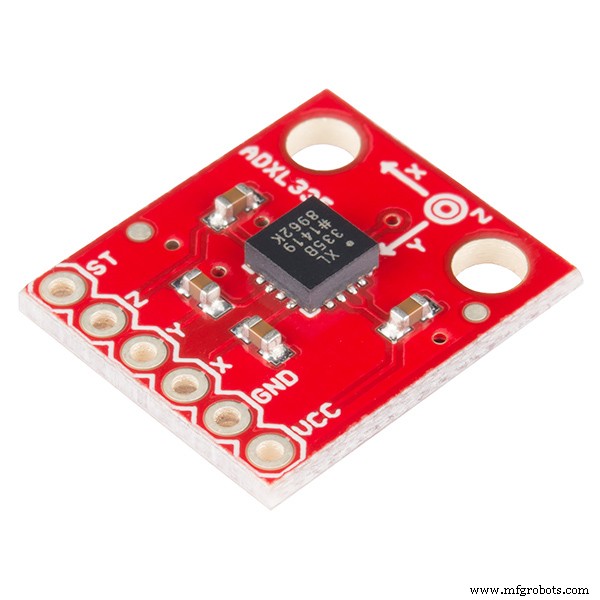
Что такое акселерометр (ADXL335)?
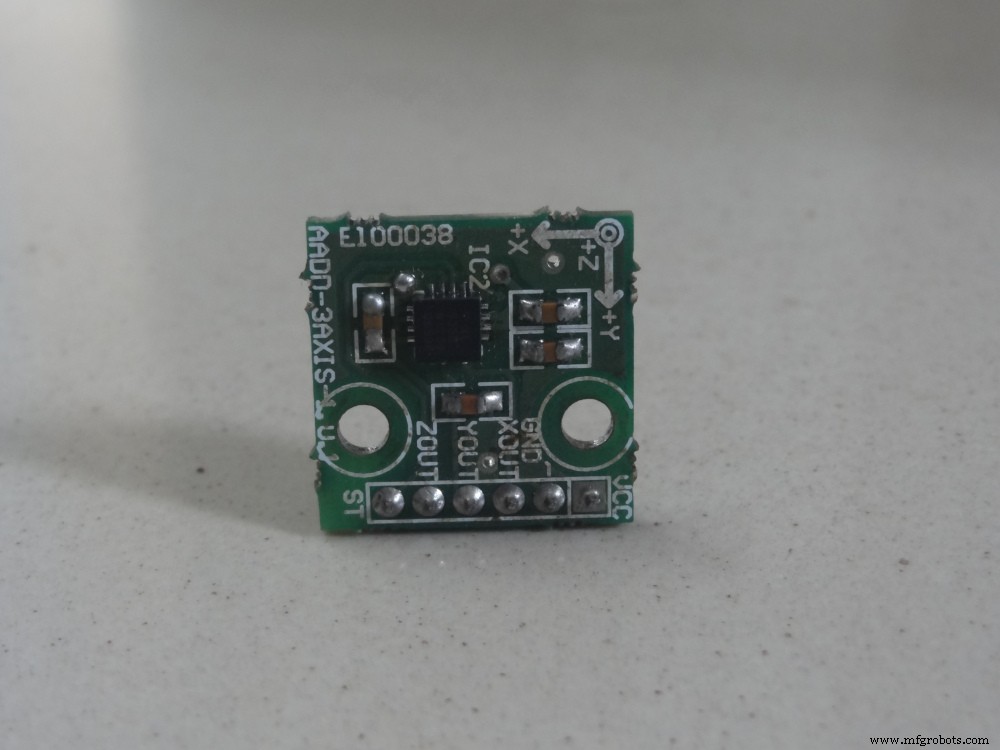
Короче говоря, акселерометр - это устройство для измерения трехосного ускорения. Здесь используется акселерометр ADXL335, имеющий 3 оси (X Y Z).
Практически во всех смартфонах появились акселерометры (хотя мы не собираемся брать его со смартфона). Вы определенно играли в подвижные игры на своем мобильном телефоне (например, Temple run), где персонаж в игре перемещается влево и вправо, когда вы наклоняете телефон влево и вправо, соответственно, это делает акселерометр.
В смартфоне есть еще один датчик, называемый гироскопом, который нам сейчас не нужен.
Как он работает и распознает жесты?
Здесь мозгом робота является Arduino Uno (Atmega32), на него подается некоторый набор кода. Жесты / движения, сделанные рукой, распознаются устройством измерения ускорения, называемым акселерометром (ADXL335).
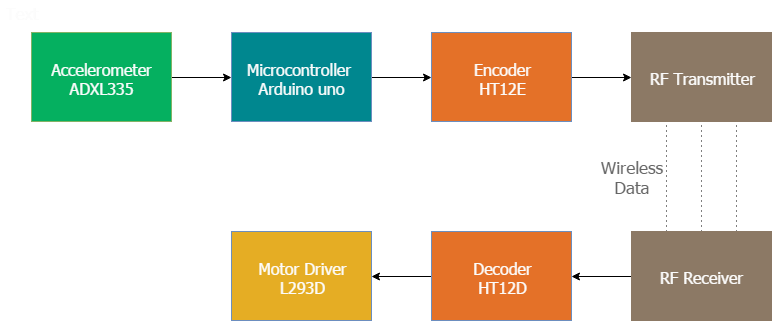
Здесь акселерометр считывает координаты X Y Z, когда мы делаем жесты вручную, и отправляем координаты X Y Z в Arduino (здесь нам не нужна ось Z, нам нужны только два скоординированных X и Y, поэтому координатой Z пренебрегаем). Arduino проверяет значения координат и отправляет 4-битный код на IC энкодера. Кодер передает данные передатчику, а переданные данные принимает РЧ-приемник. Приемник отправляет 4-битный код на IC декодера, а декодер передает его на IC драйвера двигателя. Позже водитель мотора принимает решение повернуть оба мотора в нужном направлении.
Сделайте блок питания
Сначала начнем со схемы блока питания. Нам понадобятся две цепи питания:одна для передатчика и одна для приемника. Схема приемника должна питаться от источника 12 В (поскольку я использую двигатель на 12 В), а схема передатчика может питаться от батареи 9 В.
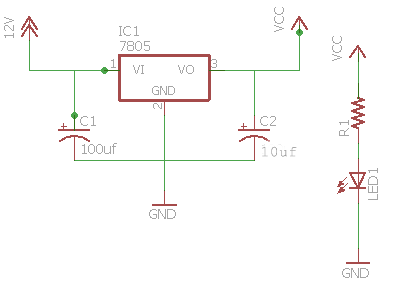
Справа вы видите схему питания приемника. Используя эту схему, подключите цепь питания. Вы также можете добавить светодиод через резистор 1 кОм для индикации состояния источника питания.
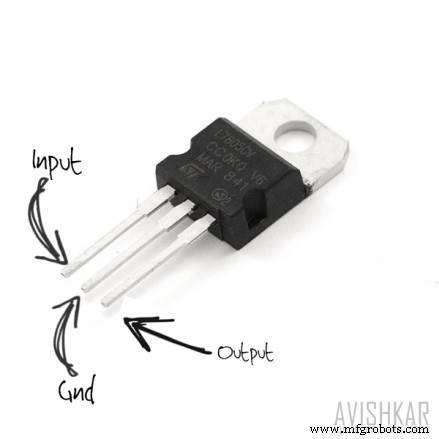
- IC 7805, которая регулирует напряжение питания 12 В до 5 В (если у вас нет источника питания 12 В, вы можете использовать источник питания 9 В).
- Конденсатор 0,1 мкФ и 470 мкФ.
- резистор 1 кОм для светодиода состояния
ПРИМЕЧАНИЕ. Используйте радиатор для 7805, потому что мы теряем 7 В (12-5), поэтому будет выделяться много тепла для сжигания регулятора, поэтому рекомендуется использовать радиатор.
Приступим к изготовлению передатчика (удаленного)
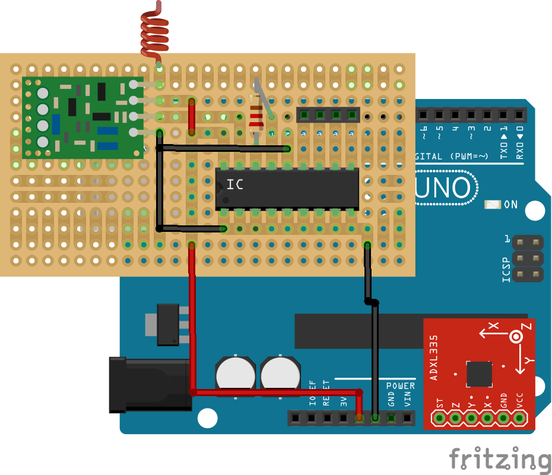
Секция передатчика состоит из акселерометра, который определяет жест руки и отправляет данные в Arduino. Позже Arduino отправляет данные на IC энкодера в соответствии с данными, полученными от акселерометра, и данные передаются на приемник. Подключите согласно приведенной ниже схеме:
ПРИМЕЧАНИЕ. Имейте в виду, что некоторые акселерометры используют источник питания 3,3 В и могут быть повреждены 5 В. Проверьте документацию поставщика, чтобы узнать, какое напряжение подходит.
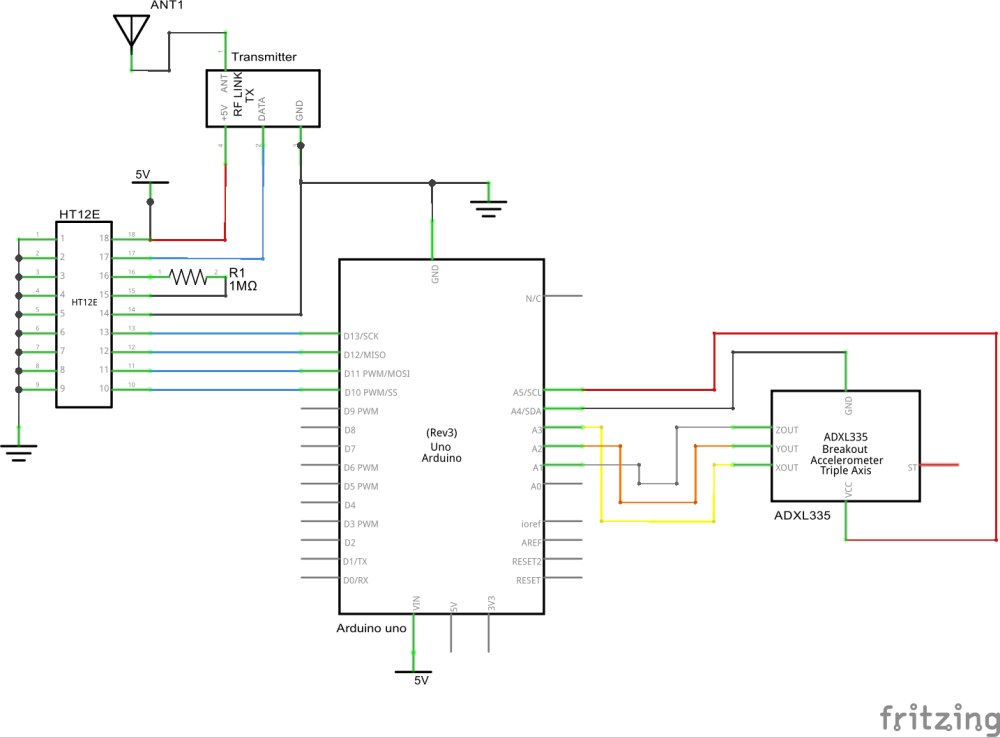
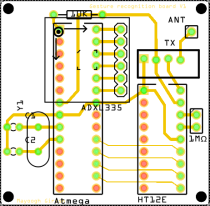
Это просто иллюстрация передатчика:
Загрузить код в Arduino
Вот обновленный код
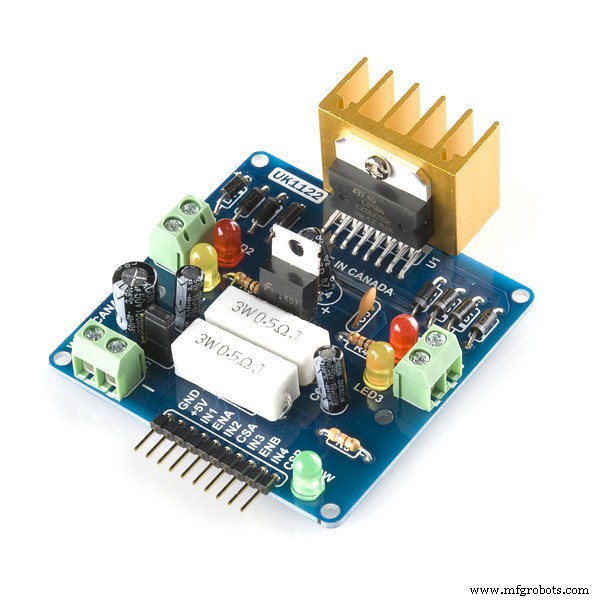
Сделайте приемник
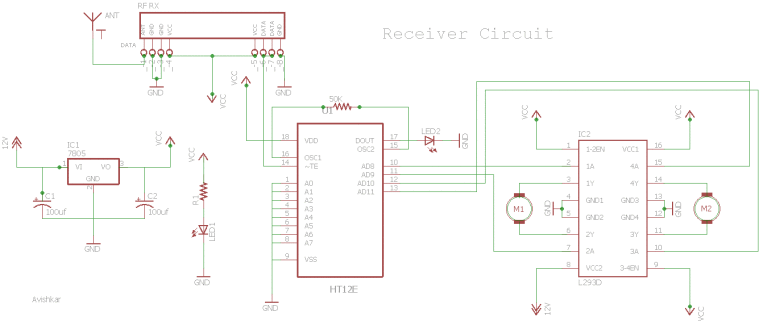
Схема приемника состоит из 2 микросхем (декодер HT12D, драйвер двигателя L293D) и модуля радиочастотного приемника.
Подключите схему согласно приведенной выше схеме приемника. На плате приемника есть 2 светодиода, один загорается, когда питание подается на приемник, а другой, когда питание подается на схему передатчика. Светодиод рядом с IC HT12D должен загореться, и это обеспечит вам действительную передачу (VT) при подаче питания на передатчик, если что-то не так с вашим подключением или модулем RF-TX-RX.
Если вы хотите узнать подробнее о разделе ресивера, прочтите эту статью.
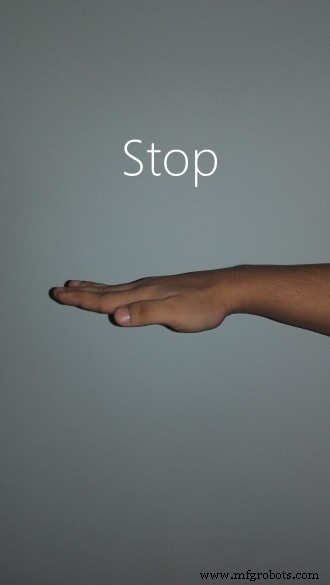
Какие жесты распознает робот?
Этот робот предназначен для распознавания пяти наборов жестов:вперед, назад, влево, вправо и стоп. Вы получите лучшее представление, если посмотрите фотографии жестов, представленные ниже.
Наслаждайтесь вождением вашего робота.
Сожмите его и сделайте постоянным.
Arduino Uno будет большой и громоздкой в руке. И если вы решите создать другой проект с использованием Arduino, вам нужно будет удалить Arduino и все соединения, сделанные на нем, и вы потеряете свою старую работу. Мне это не нравится, поэтому я придумал решение сделать это навсегда. Вы можете проверить эту статью, чтобы узнать, как сжать свой проект Arduino.
Загрузите компоновку печатной платы для автономной версии отсюда (зеркало).
standalone_etch_copper_top_mirror1.pdf standalone_etch_copper_top1.pdfПосмотрите это видео, в котором я перенес код на микроконтроллер Atmega8. Я показал только выходы микроконтроллера с помощью светодиодов.
Загляните в мой блог, чтобы узнать о моих новых проектах
Если у вас есть сомнения, оставьте здесь комментарий. Это мой блог. Я буду регулярно проверять отзывы там, а не здесь.
Производственный процесс
- Робот Raspberry Pi, управляемый через Bluetooth
- Робот, управляемый жестами, использующий Raspberry Pi
- Windows 10 IoT Core:робот, управляемый речью
- Робот, управляемый Wi-Fi и использующий Raspberry Pi
- ROObockey:робот для уличного хоккея с дистанционным управлением и прицеливанием
- Интерактивный настольный светильник, управляемый жестами
- Игровой контроллер Arduino
- Бутылка для воды с питанием от Arduino
- Робот, управляемый речью
- Ручные направляющие роботы