


Автоматизация откатных ворот
Компоненты и расходные материалы
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Об этом проекте
Обзор проекта
В этом проекте я использую мощность Arduino для создания схемы для питания откатных ворот. Основная цель этого проекта - использовать мертвые откатные ворота с работающим двигателем переменного тока и автоматизировать систему с помощью Arduino, пары реле, приемника 433 МГц, передатчика 433 МГц и некоторых искусных электрических навыков. Система создает метод питания двигателя ворот, когда это необходимо, и решает, открывать или закрывать ворота.
Arduino постоянно слушает заданный ответ от передатчика, в данном случае это пульт, используемый для открытия или закрытия ворот. Передатчик работает на двух каналах, каждый из которых имеет свой уникальный идентификатор. Как только этот идентификатор получен приемником 433 МГц, он отправляет сигнал на Arduino, который управляет реле для питания двигателя.
Методология
Шаг 1. Включите двигатель
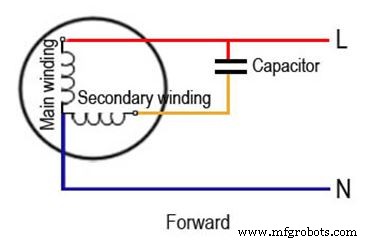
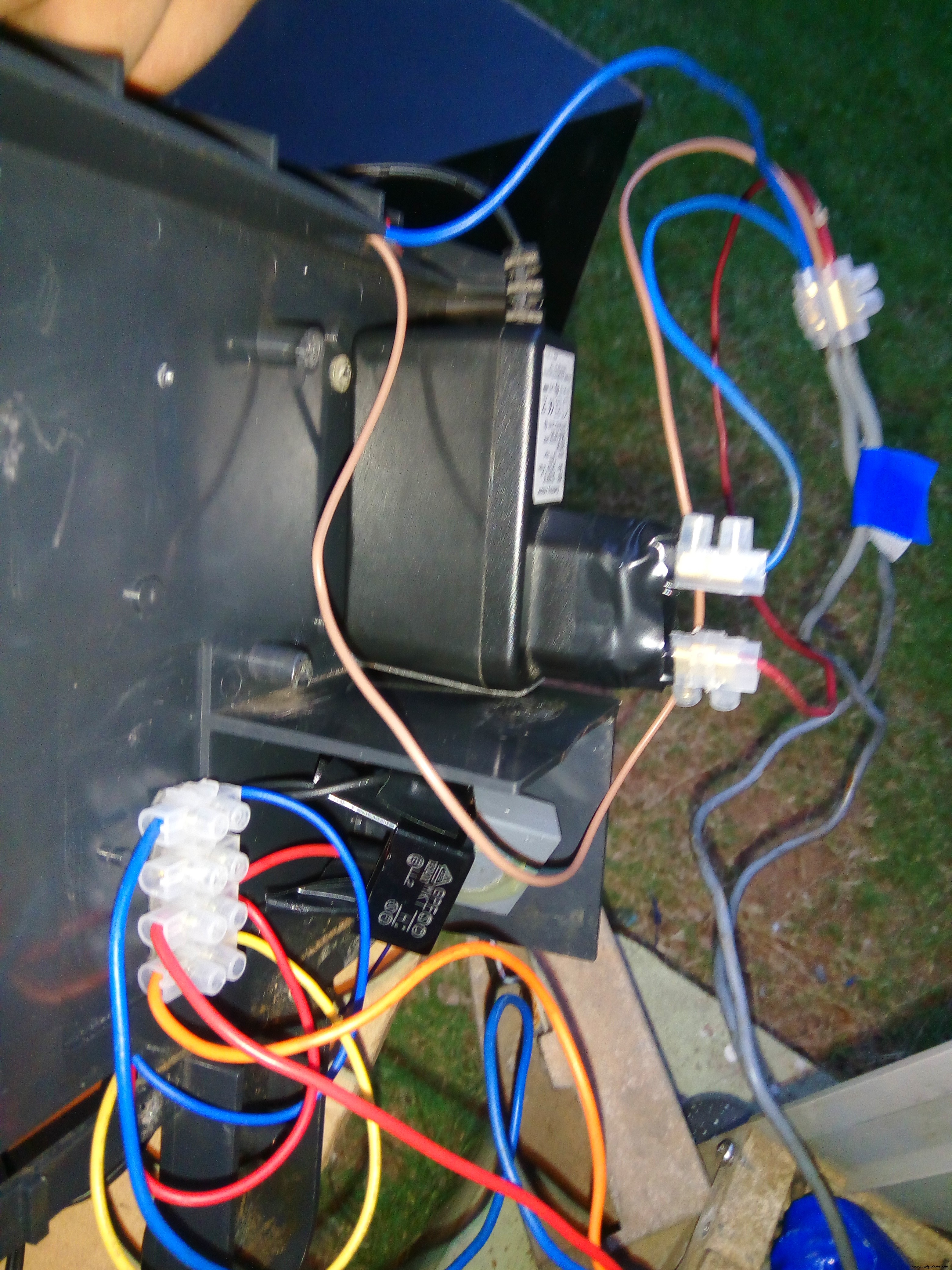
Конфигурация для питания двигателя показана ниже. Чтобы двигатель двигал ворота в прямом (закрытом) направлении, основная обмотка должна быть подключена к сети.
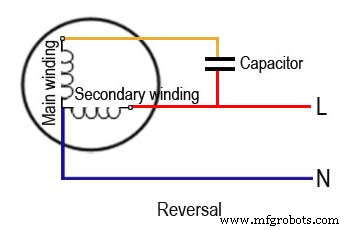
Чтобы двигатель двигался в обратном (открытом) направлении, вторичная обмотка должна быть подключена к источнику питания.
Необходимо определить, какой провод какой обмотке соответствует. Обычно провода не имеют маркировки, и это можно определить методом проб и ошибок, подав на провод питание переменного тока.
В моем случае я работал с двигателем 220 ~ 240 В переменного тока. Мне удалось легко идентифицировать нейтральный провод, поскольку он был синего цвета, который является стандартным цветом, используемым для обозначения нейтрального контакта.
Затем я подключил клемму Live к красному проводу, что заставило двигатель вращаться в прямом направлении. Это означает, что я подал питание на главную обмотку . мотора.
Примечание. Убедитесь, что пусковой конденсатор подключен правильно и работает. Это гарантирует, что двигатель имеет соответствующий пусковой крутящий момент.
Шаг 2. Остановка двигателя
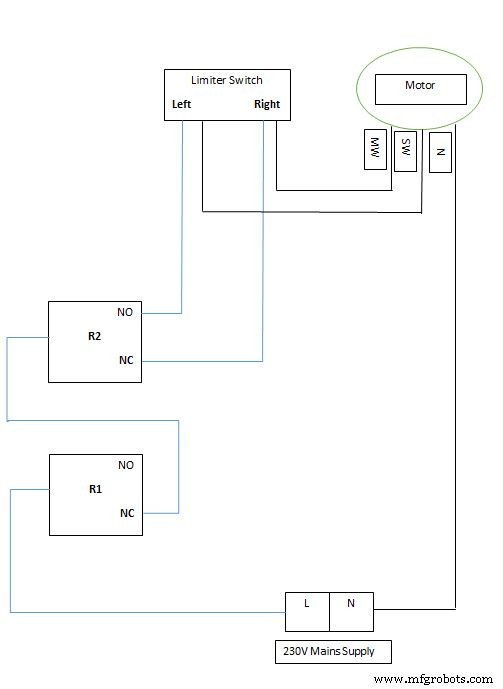
Электропитание двигателя подается через ограничительный выключатель. Как только ворота достигают одного конца, срабатывает ограничительный выключатель, который размыкает цепь и останавливает подачу энергии на двигатель из сети.
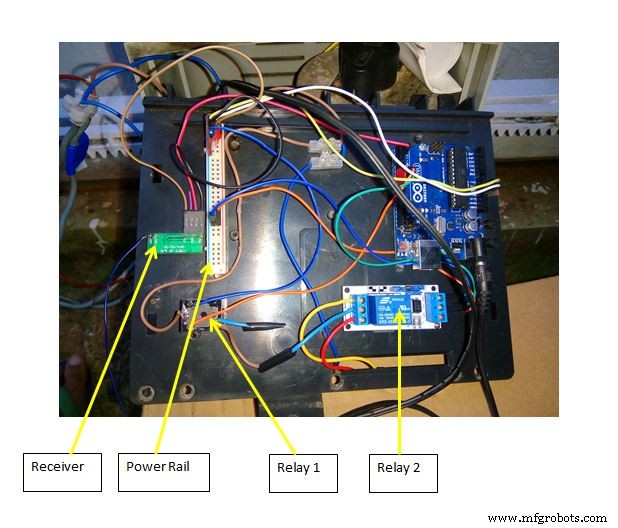
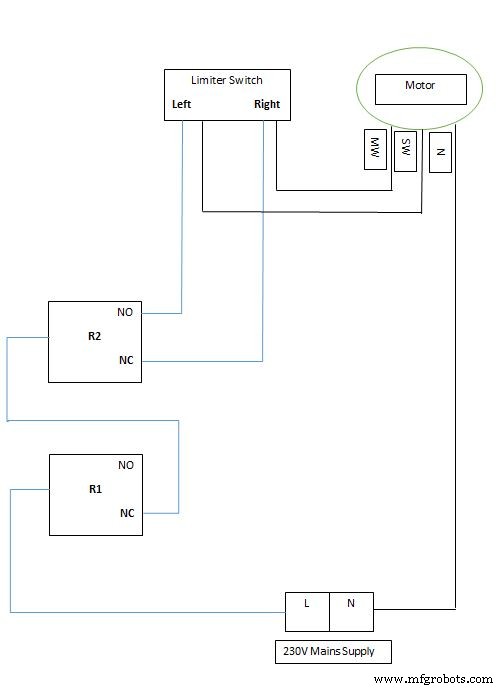
Шаг 3. Использование реле для управления двигателем
Реле имеет две точки контакта; Нормально открытый и нормально закрытый.
Нормально замкнутый путь используется для питания основной обмотки двигателя. Это было выбрано для того, чтобы гарантировать, что при сбросе системы или если что-то пойдет не так в системе, двигатель будет гарантировать, что ворота будут всегда оставаться закрытыми.
Нормально открытый путь используется для питания вторичной обмотки двигателя. Нормально открытый путь замыкается, когда катушка внутри реле находится под напряжением. Это можно сделать, отправив сигнал 5 В от Arduino, поскольку используемые реле работают при напряжении 5 В.
За счет использования двух путей подачи питания двигатель гарантирует, что питание не подается одновременно на основную и вторичную обмотки двигателя.
Это реле ( R2 ) управляется через контакт 8 Ардуино.
Второе реле ( R1 ) используется для разрыва цепи, чтобы двигатель остановился, если Arduino получит команду от приемника во время движения ворот.
Arduino постоянно проверяет приемник, если он получил какую-либо команду. После подачи команды Arduino перенаправляет питание на двигатель, чтобы он мог закрыть или открыть ворота.
Основное назначение второго реле - дать системе достаточно времени для перенаправления системы для подачи питания на двигатель без мгновенного изменения направления вращения двигателя. Когда изменение маршрута завершено, реле выключается, и на двигатель подается питание, которое вращается в противоположном направлении.
Это реле управляется через вывод 9 . Ардуино.
Назначение второй эстафеты
Если система закрывает затвор наполовину и получает команду от приемника на открытие затвора, реле срабатывает, чтобы перенаправить питание на вторичную обмотку. Поскольку это происходит почти мгновенно, реле находится под постоянным давлением обратного напряжения, генерируемого двигателем из-за внезапного отключения питания основной обмотки. Кроме того, постоянное повреждение контактов реле при постоянном напряжении.
С помощью дополнительного реле источник питания отключается от двигателя и дает системе время в 10 секунд, чтобы перенаправить питание на необходимые обмотки. Это снижает нагрузку на контакты реле и увеличивает срок их службы.
Метод релейной защиты:
Конденсаторы подавления
Когда двигатель постоянного тока внезапно останавливается, обмотка двигателя создает петлю отрицательного тока, это происходит из-за индуктивных свойств катушки. Однако это можно нейтрализовать, установив диод обратной связи, чтобы обеспечить путь для прохождения отрицательного тока.
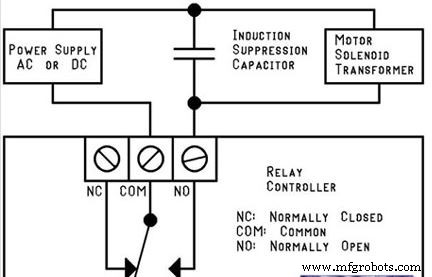
Когда двигатель переменного тока внезапно останавливается переключателем, на его контактах создается высокое напряжение.
Конденсаторы подавления используются для предотвращения нарастания высокого напряжения на контактах реле, когда двигатель получает команду работать в противоположном направлении. Это защищает релейные контакты.

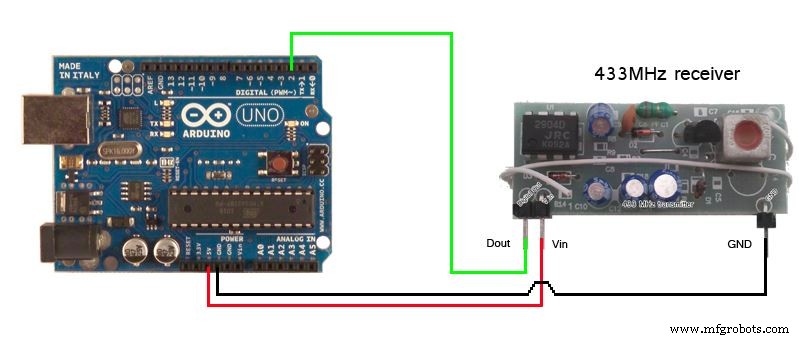
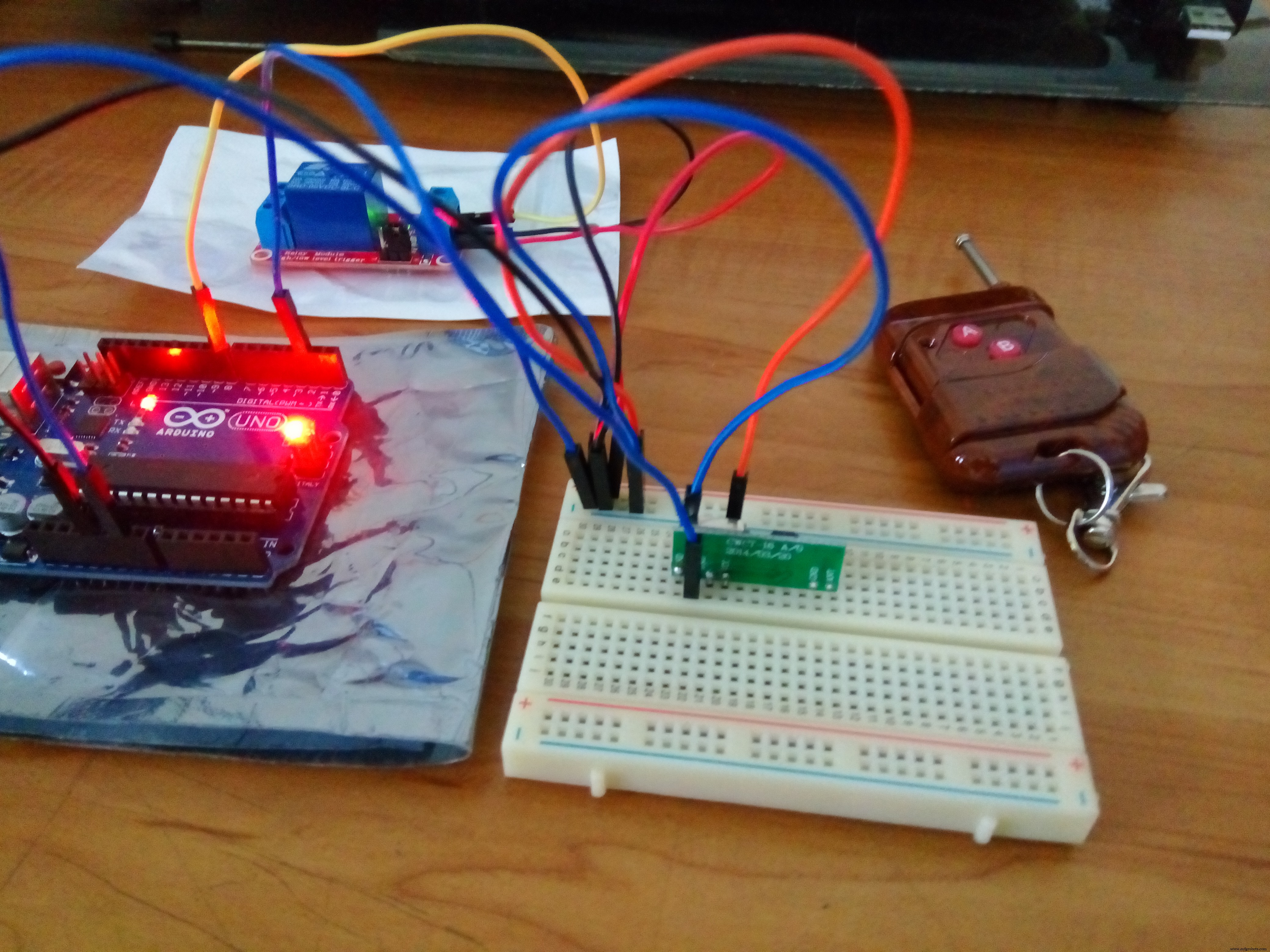
Шаг 4. Настройка приемника
Приемник работает на частоте 433 МГц, программа Arduino постоянно зацикливается для проверки порта сигнала приемника. После получения правильного сигнала Arduino активирует реле 1 (R1), чтобы реле 2 (R2) передавало питание на двигатель.
Когда данные отправляются от передатчика, они принимаются приемником в виде целого числа. В моем случае, используя последовательный монитор Arduino, я смог увидеть значение, которое смог получить приемник.
Основная причина использования более высокой радиочастоты для связи заключается в том, что рабочий диапазон велик и сигнал принимается приемником, даже если есть несколько препятствий, блокирующих сигнал. Этого можно добиться только с помощью высокочастотных радиоволн.
В моем проекте я смог получить рабочий радиус около 30 футов для активации системы.
Примечание. Радиус действия системы можно увеличить на несколько футов, припаяв длинный провод к антенне . порт в модуле приемника.

Демо-видео
Окончательные снимки проекта
Схема
Производственный процесс
- МАЛИНОВАЯ АВТОМАТИЗАЦИЯ ДОМА
- Прототип Raspoulette
- Сила ветра
- Руководство по силовым молотам
- Токарный центр оснащен двигателем шпинделя мощностью 75 л.с. с высоким крутящим моментом
- Индустрия 4.0 в производстве:растущая мощь автоматизации
- Что такое линейный двигатель?
- Понимание автоматизации печати
- Что такое серводвигатель?
- Что такое силовой патрон?