


Arduino Trash-Bot (автоматическое открытие / закрытие корзины для мусора)
Компоненты и расходные материалы
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 |
Приложения и онлайн-сервисы
 |
|
Об этом проекте
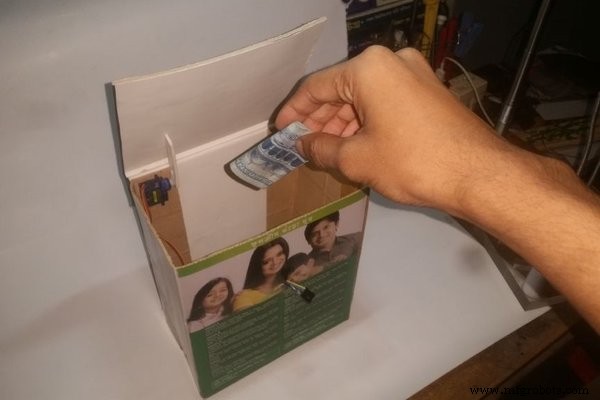
Все становится умнее, правда? Так почему бы не мусорное ведро? Эта корзина для мусора открывается и закрывается крышкой, если видит перед собой мусор. Вам просто нужно поднести к нему мусор, и он откроется автоматически и будет ждать, пока вы его накормите еще раз, а затем через определенную задержку он автоматически закроется. Посмотрите видео, чтобы узнать, на что он способен.
Приступим.
Шаг 1. Компоненты



(еще 2 изображения)
- Arduino Uno (любая плата)
- Серводвигатель (я использую микро-сервопривод SG90)
- Ультразвуковой датчик HCSR04
- Сервоприводы (рядом с сервоприводом на рис. 2)
- Картон (просто нарезанный кусок)
- Корзина для мусора
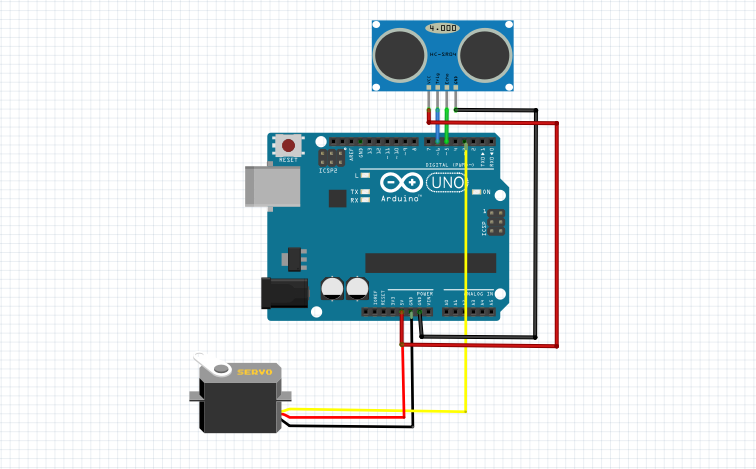
Шаг 2. Постройте схему
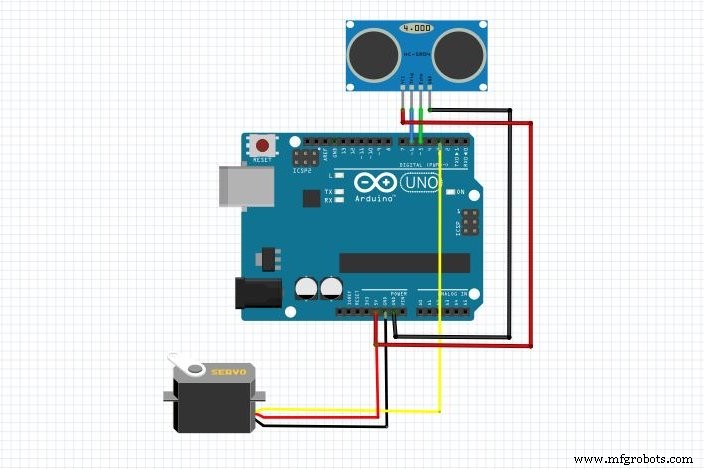
Схема такая простая. Поскольку сервопривод и сонар потребляют меньше энергии, вы можете просто запитать их напрямую от источника Arduino 5v. Просто не забудьте запитать Arduino постоянным током более 7,4 В или не менее 7 В.
- Серво данные (желтые) к контакту 3 Arduino
- Сервопривод vcc (красный) на 5 В Arduino
- Заземление сервопривода (черный / серый) на Arduino Gnd.
- Срабатывание датчика сонара на Arduino 6
- Эхо от датчика сонара для Arduino 5
- Vcc для Arduino 5v
- Земля на Arduino Земля
Шаг 3. Подключите сервопривод



Просто возьмите этот сервомеханизм и прикрепите его к длинной картонной части с помощью горячего клея или другого клея. Вы также можете использовать палочку для мороженого вместо картона. Затем подсоедините длинный сервопривод к серводвигателю.
Шаг 4. Добавьте датчик сервопривода и сонара в корзину



Подключите датчик сонара лицевой стороной вверх к мусорному ведру вот так. А затем добавьте серводвигатель, как показано на рис. 2 и 3, чтобы сервопривод мог вращаться вверх.
Шаг 5. Код
Ссылка на код:https://github.com/ashraf-minhaj/Trash-bot
Я запрограммировал Arduino так, что если он видит какой-либо мусор (буквально что угодно) в диапазоне 50 см, сервопривод переходит на 50 градусов и ударяется о верхнюю крышку бункера, так что верхняя крышка открывается, ждет три секунды, затем автоматически поворачивается на 160 градусов и, таким образом, закрывается верхняя крышка. Итак, теперь вы видите автоматическое открытие / закрытие мусорного бота.
#include Сервопривод; int const trigPin =6; int const echoPin =5; void setup () {pinMode (trigPin, OUTPUT); pinMode (echoPin, ВХОД); servo.attach (3);} void loop () {int продолжительность, расстояние; digitalWrite (trigPin, HIGH); delay (1); digitalWrite (trigPin, LOW); // Измеряем входной импульс в эхо pinduration =pulseIn (echoPin, HIGH); // Расстояние равно половине длительности, деленной на 29,1 (из таблицы) distance =(duration / 2) / 29.1; // если расстояние меньше 0,5 метра и больше 0 (0 или меньше означает выход за пределы диапазона) if (distance <=50 &&distance> =0) {servo.write (50); delay (3000);} else {servo.write (160);}
Шаг 6. Готово

Итак, теперь просто запитайте Arduino напряжением более 7 В, и у вас есть робот-мусорный бак.
Спасибо.
[Если вам нравятся мои работы, поддержите меня, подписавшись на мой канал на YouTube]
Код
- код мусорного бота arduino
код мусорного бота arduino C / C ++
#includeСервопривод; int const trigPin =6; int const echoPin =5; void setup () {pinMode (trigPin, OUTPUT); pinMode (echoPin, ВХОД); servo.attach (3);} void loop () {int продолжительность, расстояние; digitalWrite (trigPin, HIGH); delay (1); digitalWrite (trigPin, LOW); // Измеряем входной импульс в эхо pinduration =pulseIn (echoPin, HIGH); // Расстояние равно половине длительности, деленной на 29,1 (из таблицы) distance =(duration / 2) / 29.1; // если расстояние меньше 0,5 метра и больше 0 (0 или меньше означает выход за пределы диапазона) if (distance <=50 &&distance> =0) {servo.write (50); delay (3000);} else {servo.write (160);} // Ожидание 60 мс не повредит никому onedelay (60);}
Схема
код мусорного бота arduino
https://github.com/ashraf-minhaj/Trash-botПроизводственный процесс