


USB-трекпад, управляемый Arduino
Компоненты и расходные материалы
 |
| × | 1 |
Приложения и онлайн-сервисы
 |
|
Об этом проекте
Каждый раз, когда выходит новый Raspberry Pi, я смотрю на характеристики и думаю про себя:«Я действительно хочу сделать из этого ноутбук», но всегда возникает одна проблема, а именно:я никогда не смогу найти отдельный USB-трекпад для ноутбук. Итак, в этом проекте мы собираем трекпад со старого сломанного ноутбука и конвертируем его в USB-устройство с помощью Arduino Pro Micro.
Шаг 1. Детали

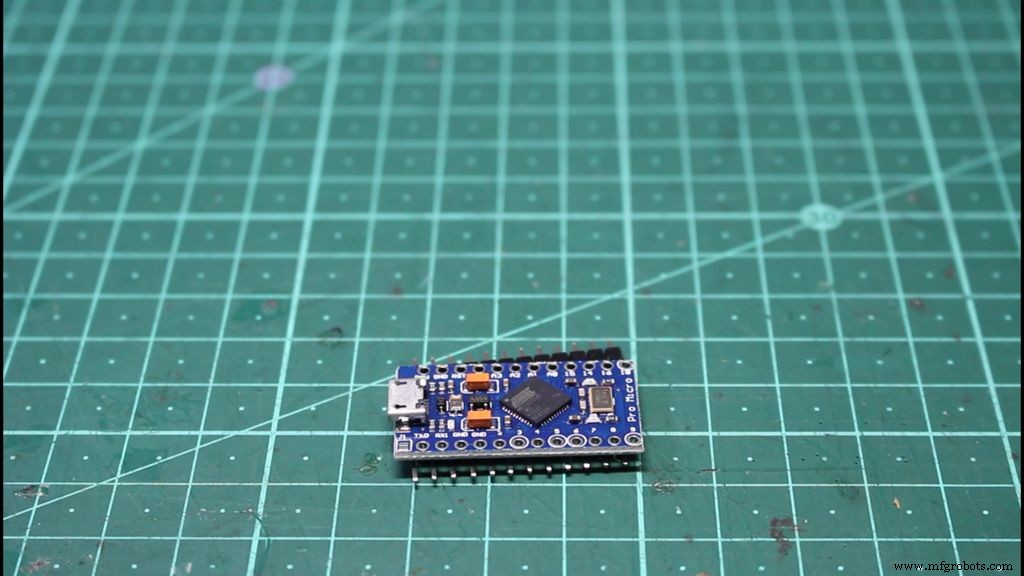
Детали, необходимые для этого проекта, действительно просты, нам понадобится трекпад от старого ноутбука, микросхема Arduino и немного провода. К сожалению, есть только несколько разновидностей Arduino, которые мы можем использовать, это Arduino micro, pro micro и Leonardo, поскольку они могут быть запрограммированы так, чтобы отображаться как HID (устройства с человеческим интерфейсом), что означает, что они могут отображаться на компьютере как мышь или клавиатура. Это то, что Arduino Uno не может сделать. Вы можете получить Arduino pro micro здесь:Здесь Что касается трекпада, если вы предпочитаете его купить, его можно найти здесь:Здесь
Шаг 2. Почему это работает

Таким образом, причина, по которой мы можем связать трекпад с Arduino, заключается в том, что трекпады большинства старых ноутбуков обменивались данными с компьютером через интерфейс PS / 2, что означает, что схема трекпада имеет выходы PS / 2, которые являются данными и часами, эти данные затем считываются Arduino. и преобразованы в данные, которые можно отправить на компьютер через интерфейс USB. Теперь я должен отметить, что не все трекпады ноутбуков одинаковы, почти все старые ноутбуки используют интерфейс PS / 2, но некоторые новые используют интерфейс USB вместо интерфейса PS / 2. Если вам удастся найти один из этих трекпадов USB вместо PS / 2, вы можете просто погуглить имя трекпада, найти распиновку USB и подключить его к компьютеру USB, и он будет работать. Однако в этом проекте мы будем использовать более распространенный трекпад PS / 2 и использовать Arduino, чтобы превратить его в USB-мышь.
Шаг 3. Подключение



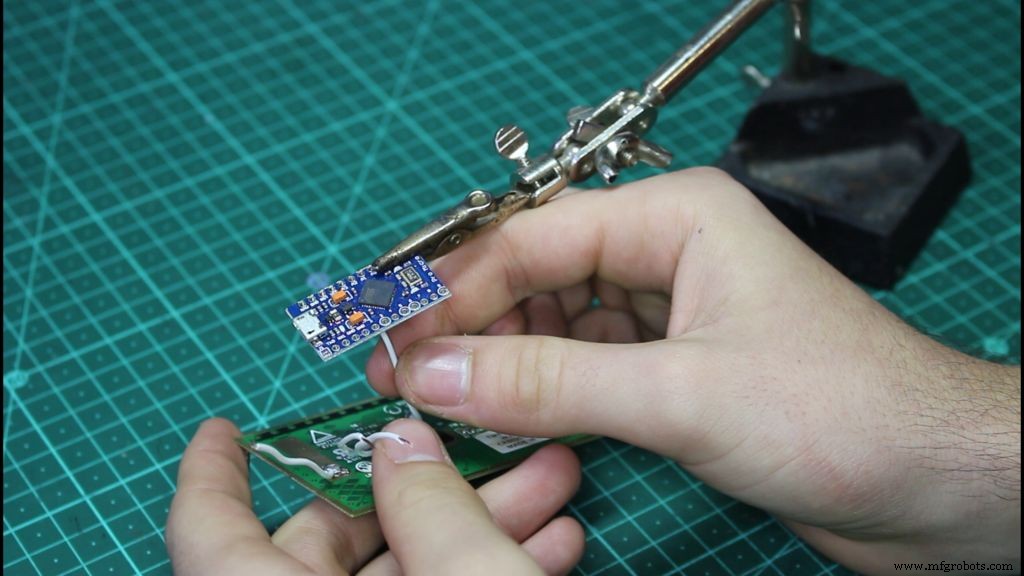
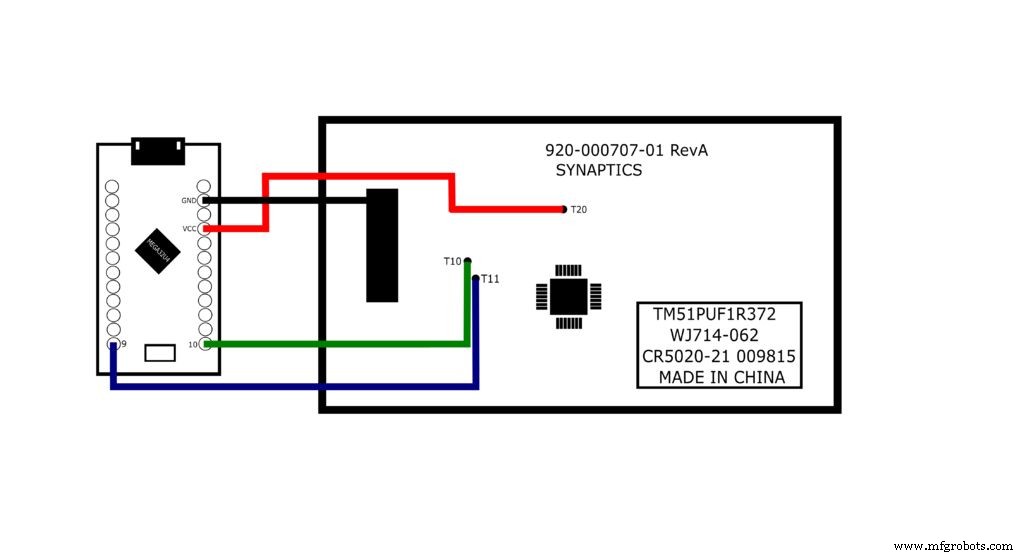
Проводка для этого проекта довольно проста, все, что нам нужно сделать, это найти 4 контактных площадки на нашем трекпаде. Их довольно легко найти, поскольку они помечены как T10 (данные), T11 (часы) и T20, а соединение с землей представляет собой просто большую открытую металлическую поверхность. Нам нужно аккуратно припаять провод к каждой из этих площадок, а затем подключить их к соответствующим контактам Arduino.
- T10 подключается к контакту 10 на Arduino micro.
- T11 подключается к выводу 9 на Arduino micro.
- T20 подключается к 5 В на Arduino micro
- Земля подключается к заземлению на Arduino micro.
После того, как вы припаяли провода к контактным площадкам на трекпаде, очень важно, чтобы вы не оказывали на них никакого давления, даже малейшее давление на контактные площадки может полностью сорвать их и сделать ваш трекпад бесполезным. Лучше всего покрыть соединение горячим клеем после того, как вы его припаяли.
Шаг 4. Установка некоторых библиотек
Для этого проекта нам нужно будет установить две библиотеки в IDE Arduino, это следующие библиотеки:
- Библиотека мыши:здесь
- Библиотека PS / 2:здесь
Загрузите их, откройте файл библиотеки IDE Arduino и вставьте их. Библиотека PS / 2 используется для получения данных с трекпада, а библиотека мыши позволяет нам принимать эти данные и превращать их в команды мыши, которые компьютер может прочитать. порт USB.
Шаг 5. Код
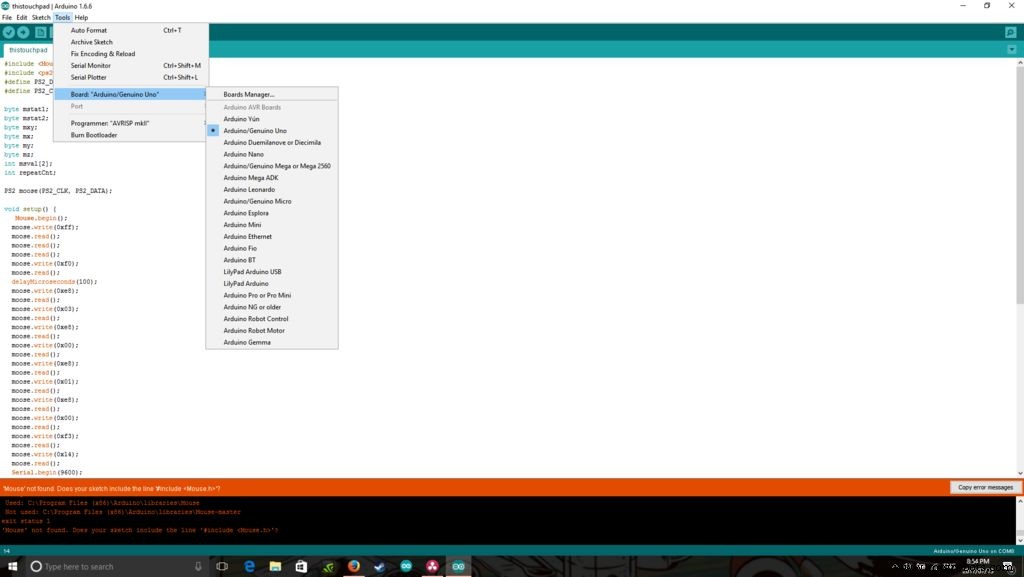
Теперь, когда у нас установлены библиотеки, мы можем загрузить наш код в Arduino, код можно найти ниже, однако я должен отметить, что код не будет загружаться или компилироваться, если плата, выбранная в инструментах, не является Arduino micro или Leonardo, поэтому сохраните это в не возражайте, если вы получите ошибку при компиляции кода. После загрузки кода Arduino перезагрузится как HID-устройство и отобразится на компьютере как мышь.
thistouchpad.ino
Шаг 6. Завершение работы и устранение неполадок
Итак, теперь, когда вы касаетесь сенсорной панели, вы должны увидеть движение на экране, и, поскольку Arduino действует как USB-устройство, вы можете подключить его к любому компьютеру, и он мгновенно загрузится как USB-мышь независимо от операционной системы или типа компьютера. . Теперь, если вы не хотите проходить процесс программирования и подключения Arduino, вы можете просто купить преобразователь PS / 2 в USB, но я бы не рекомендовал это, поскольку я читал, что это портит данные, поступающие из трекпад и может сделать его непригодным для использования плюс, используя Arduino, мы можем полностью настроить все, что касается мыши, в соответствии с нашими предпочтениями, например, скорость мыши и какие действия, такие как двойное нажатие и прокрутка, можно найти, можно найти информацию о том, как вы можете полностью настроить свою. на странице мыши Arduino Здесь.
Если ваш трекпад не отправляет данные обратно, это может быть легко исправить, взгляните на заднюю часть трекпада и попытайтесь найти номер детали, затем вы можете погуглить этот номер детали со словом распиновка, и он должен показать вам, где данные , контакты часов и 5 вольт.
Большое спасибо за чтение, как всегда, если у вас есть какие-либо вопросы, оставляйте их в комментариях, и я постараюсь ответить вам.
Код
- Код
Код Arduino
вставить в arduino ide#include#include #define PS2_DATA 10 # определить PS2_CLK 9byte mstat1; byte mstat2; byte mxy; byte mx; байт мой; байт mz; int msval [2]; int repeatCnt; лось PS2 (PS2_CLK, PS2_DATA); void setup () {Mouse.begin (); moose.write (0xff); moose.read (); moose.read (); moose.read (); moose.write (0xf0); moose.read (); delayMicroseconds (100); moose.write (0xe8); moose.read (); moose.write (0x03); moose.read (); moose.write (0xe8); moose.read (); moose.write (0x00); moose.read (); moose.write (0xe8); moose.read (); moose.write (0x01); moose.read (); moose.write (0xe8); moose.read (); moose.write (0x00); moose.read (); moose.write (0xf3); moose.read (); moose.write (0x14); moose.read (); Serial.begin (9600);} пустая ms_read () {moose.write (0xeb); moose.read (); mstat1 =moose.read (); mxy =moose.read (); mz =moose.read (); mstat2 =moose.read (); mx =moose.read (); мой =moose.read (); msval [0] =(((mstat2 &0x10) <<8) | ((mxy &0x0F) <<8) | mx); msval [1] =(((mstat2 &0x20) <<7) | ((mxy &0xF0) <<4) | мой); msval [2] =int (mz);} недействительный цикл () {ms_read (); если (msval [0]> 0 и msval [2]> 10) {repeatCnt ++; } еще {repeatCnt =0; } если (repeatCnt> 2) {msval [0] =map (msval [0], 580, 5164, -1023, 1023); msval [1] =map (msval [1], 1120, 5967, 1023, -1023); Mouse.move (msval [0] / 200, msval [1] / 200); }}
Производственный процесс
- Робот Raspberry Pi, управляемый через Bluetooth
- Интерактивный настольный светильник, управляемый жестами
- Игрушка под управлением Android с использованием Raspberry Motor Shield
- Светодиоды, управляемые Alexa через Raspberry Pi
- Радиоуправляемая машина с джойстиком
- Роботизированная рука, управляемая нунчук (с Arduino)
- Робот, управляемый речью
- MobBob:самостоятельный робот Arduino, управляемый смартфоном Android
- Устройства с голосовым управлением Bluetooth с OK Google
- Робот-пианино, управляемый Arduino:PiBot