


Роботизированная рука, управляемая нунчук (с Arduino)
Компоненты и расходные материалы
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 |
Приложения и онлайн-сервисы
 |
|
Об этом проекте
Роботизированное оружие - это круто! Они есть на заводах по всему миру, где с точностью красят, паяют и перевозят вещи. Их также можно найти в космических исследованиях, подводных аппаратах с дистанционным управлением и даже в медицине!
И теперь вы можете иметь более дешевую их версию у себя дома, в офисе или в лаборатории! Устали выполнять однообразную работу? Запрограммируйте собственного робота, чтобы он помог вам ... или все испортил! :D
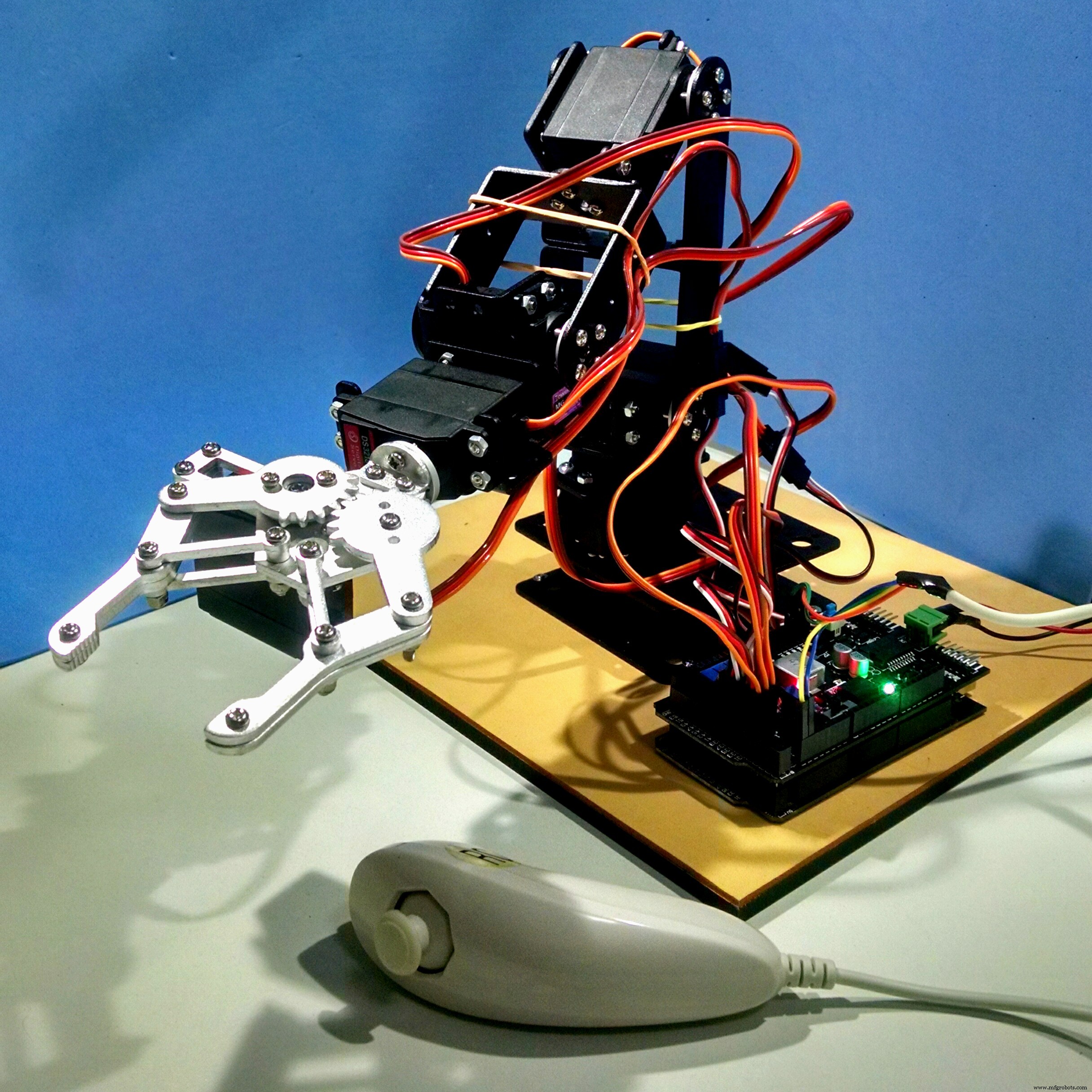
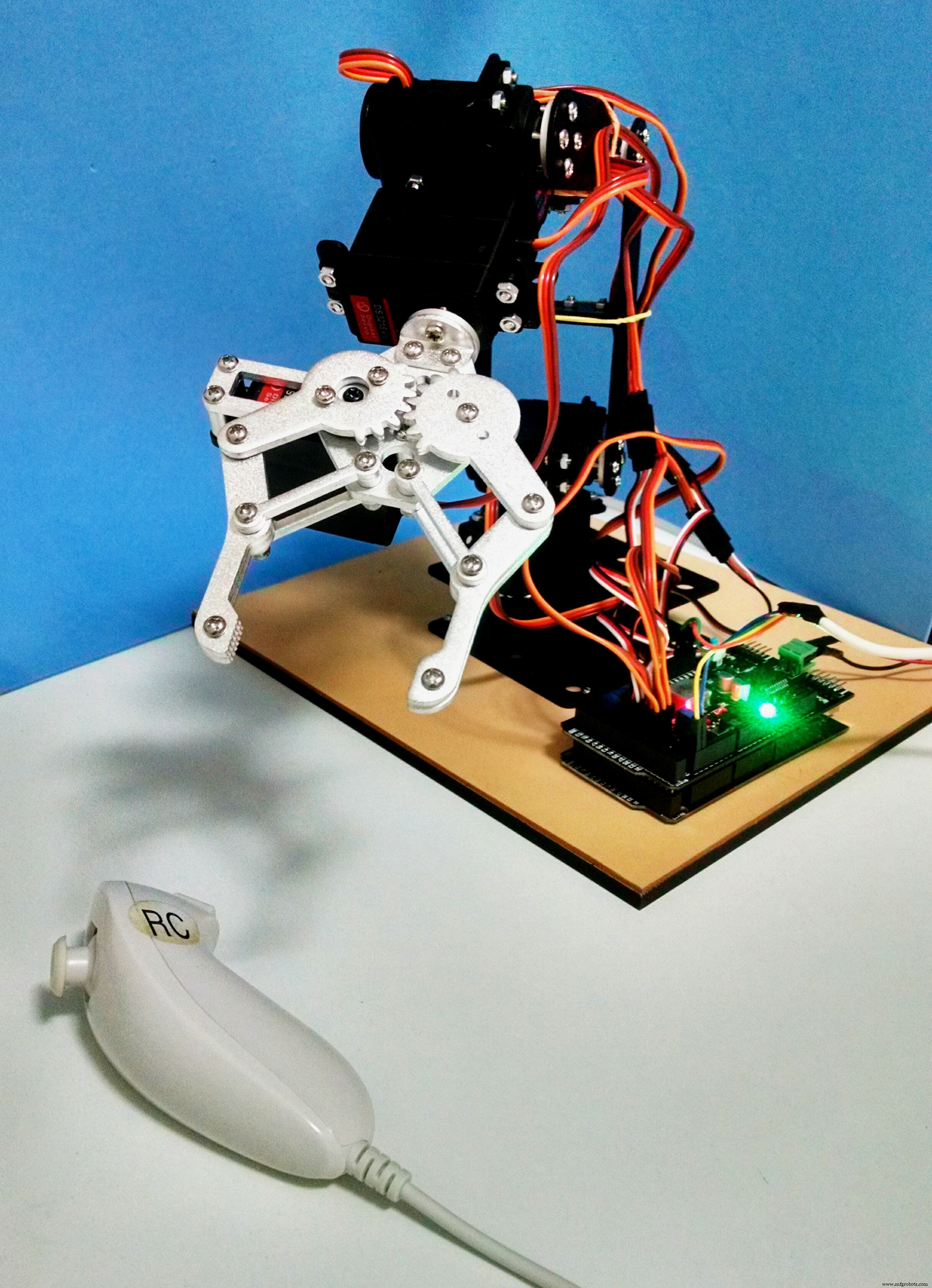
В этом уроке я покажу вам, как установить роботизированную руку и как ее запрограммировать с помощью Arduino Mega. В этом проекте я также хотел испытать другой метод управления роботизированной рукой:с помощью Nintendo Nunchuk! Они дешевы, их легко найти, и в них есть множество датчиков.
Есть несколько способов использовать это руководство. Если у вас нет комплекта роботизированной руки (и вы не хотите покупать или строить его), вы все равно можете использовать его, чтобы узнать что-нибудь о программировании Arduino и о том, как связать Wii Nunchuk с вашими собственными проектами. Вы также можете использовать его, чтобы попрактиковаться в электронике и механике.
Шаг 1. Инструменты и материалы


В этом проекте были использованы следующие инструменты и материалы:
Инструменты и материалы:
- Припой и проволока. Мне пришлось припаять несколько клемм к проводам Нунчука, чтобы подключить его к Arduino;
- Термоусадочная трубка . Некоторые куски термоусадочной трубки использовались для лучшей изоляции проводников;
- Отвертка. Конструкция крепится с помощью нескольких болтов и гаек;
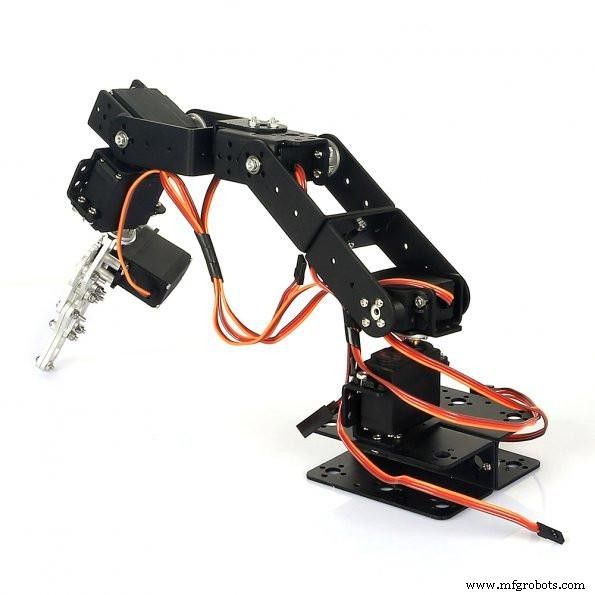
- 6-осевой механический настольный робот-манипулятор (ссылка на сайт). Этот замечательный комплект уже состоит из нескольких компонентов, как описано ниже. Надежен и прост в сборке;
- Блок питания 12 В (2 А и более);
- Контроллер Nunchuk (ссылка на сайт). Он взаимодействует с платой Arduino и используется для управления роботизированной рукой;
- "папа" перемычки (4 провода);
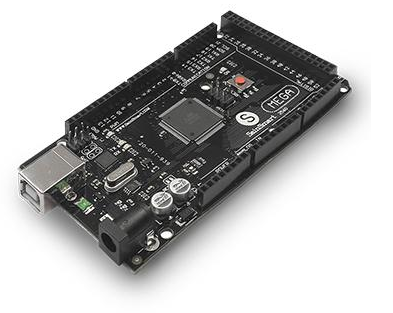
- Arduino Mega (ссылка / ссылка / ссылка). Обратите внимание, что в комплект роботизированной руки, который я использовал, также входит комплект платы и контроллера, который уже идет в комплекте с этой платой Arduino. Если вы не используете один из этих наборов, вы можете использовать и другие платы Arduino;
Позже мне сообщили, что есть адаптер Nunchuk, который упрощает подключение к хлебной доске (ссылка / ссылка). Это хороший вариант, если вы хотите потратить некоторое время на пайку и не хотите разрушать исходный разъем, как описано в шаге 9.
6-осевой механический настольный кронштейн Sain Smart уже поставляется со следующими компонентами:
- Arduino Mega 2560 R3 (ссылка)
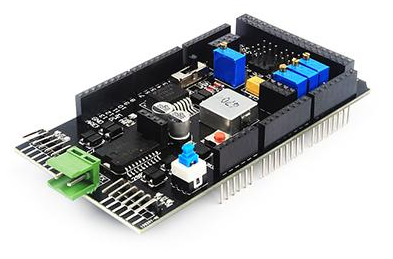
- Щит платы управления (ссылка)
- Модуль беспроводного приемопередатчика NRF24L01 + (ссылка)
- Трехосевой гироскоп MPU6050 и трехосевой акселерометр (ссылка)
- Винт M3X8 71 x
- Гайка 47 x M3
- 2 U-образных кронштейна
- 5 кронштейнов сервопривода
- Сервопривод 4 x 9 кг (ссылка)
- 2 сервопривода по 20 кг (ссылка)
- 6 металлических сервоприводов.
- 3 U-образных кронштейна
- 21 прямоугольная скоба
- 3 фланцевых подшипника
- 1 захват
Вы можете найти другие комплекты роботизированных манипуляторов в Интернете или даже разработать свои собственные. Например, есть несколько классных проектов, которые можно напечатать на 3D-принтере.
В следующих 7 шагах я покажу вам, как собрать комплект рычага перед подключением цепей. Если у вас нет подобного комплекта, смело перепрыгивайте несколько ступенек. Вы можете использовать другой комплект роботизированного манипулятора, собрать его и сразу перейти к шагам по электронике и программированию.
На каждом этапе есть анимированный gif, показывающий, как была собрана моя роботизированная рука. Он работает только на настольной версии веб-сайта.
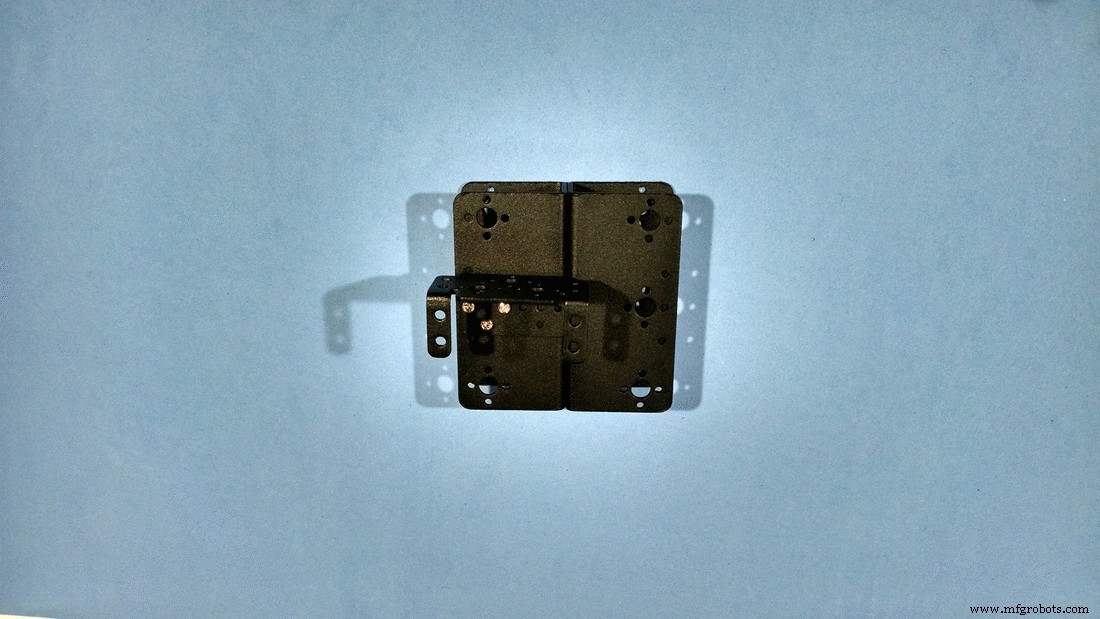
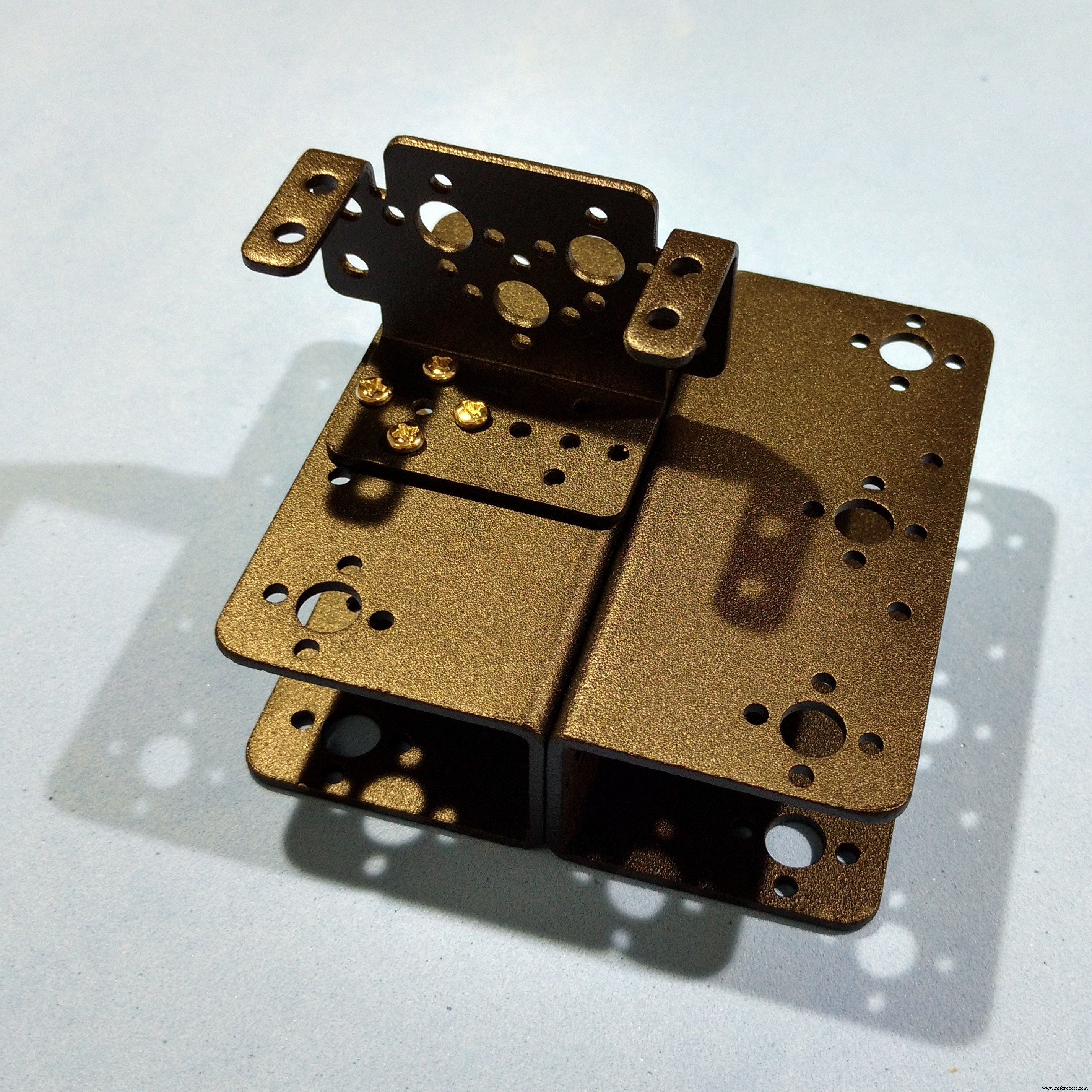
Шаг 2. Сборка роботизированной руки Pt1 - основание
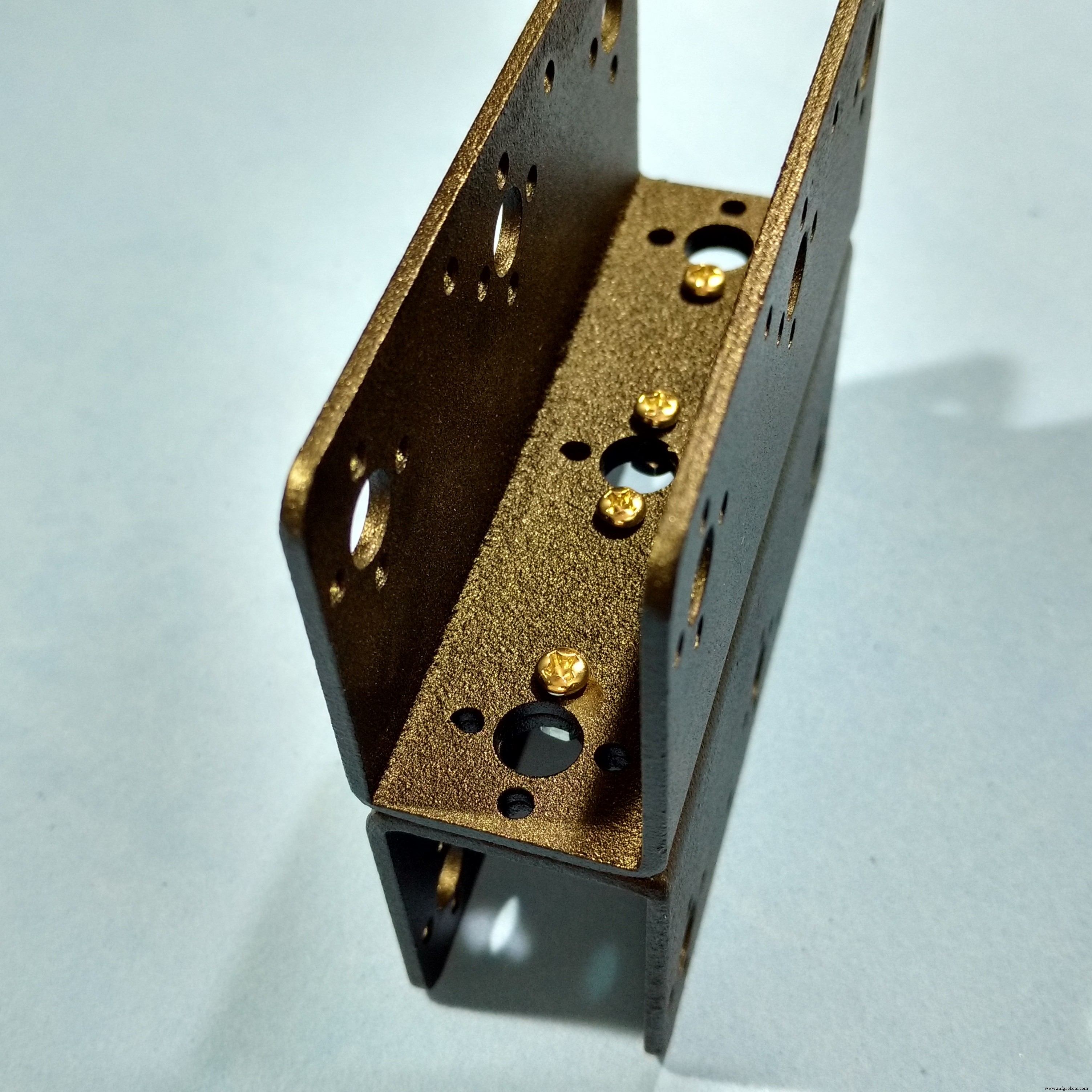
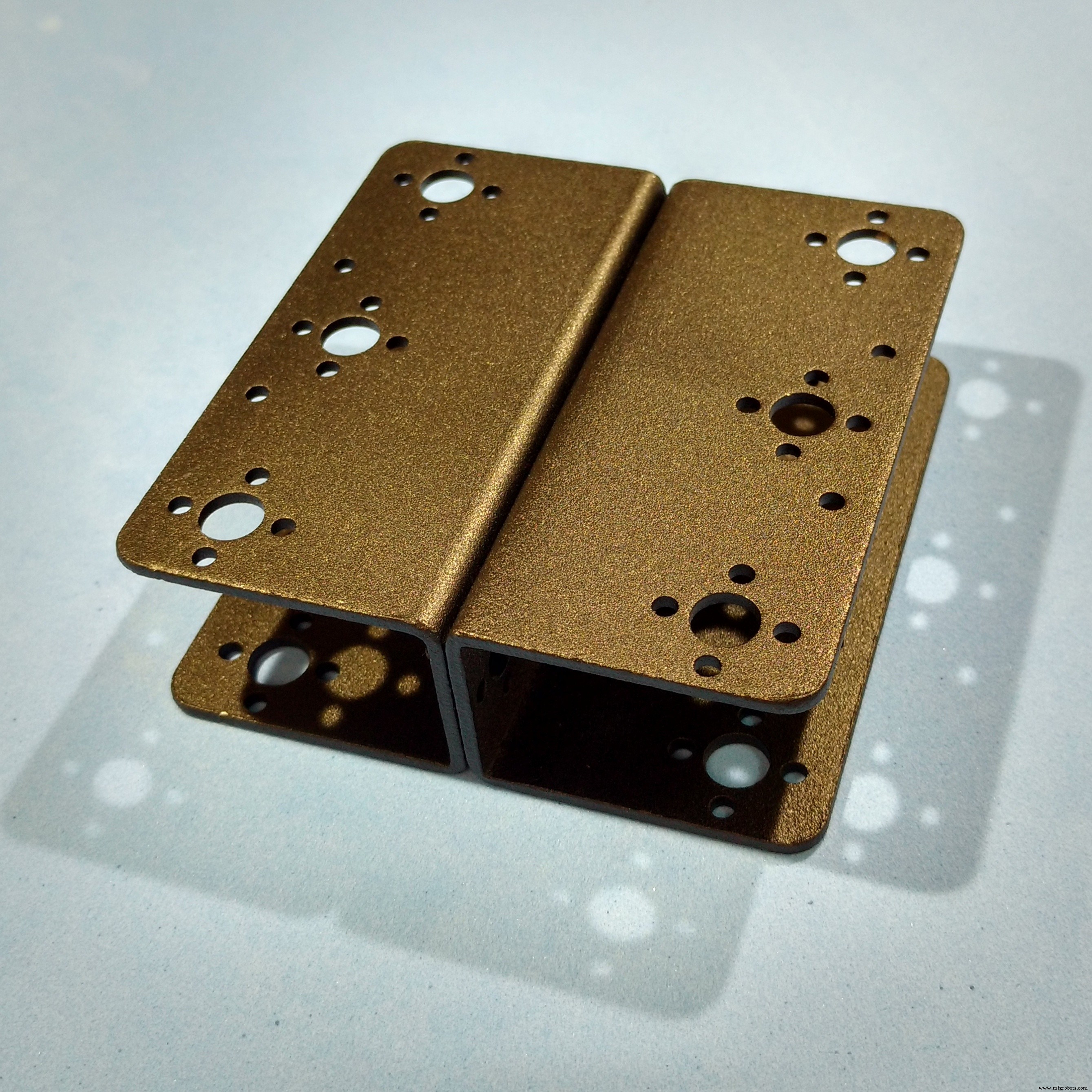
Первая часть, которую нужно собрать, - это основание робота.
Он состоит из двух U-образных кронштейнов, соединенных друг с другом четырьмя болтами M3 и гайками, как показано на рисунках. Вероятно, это самая простая установка.
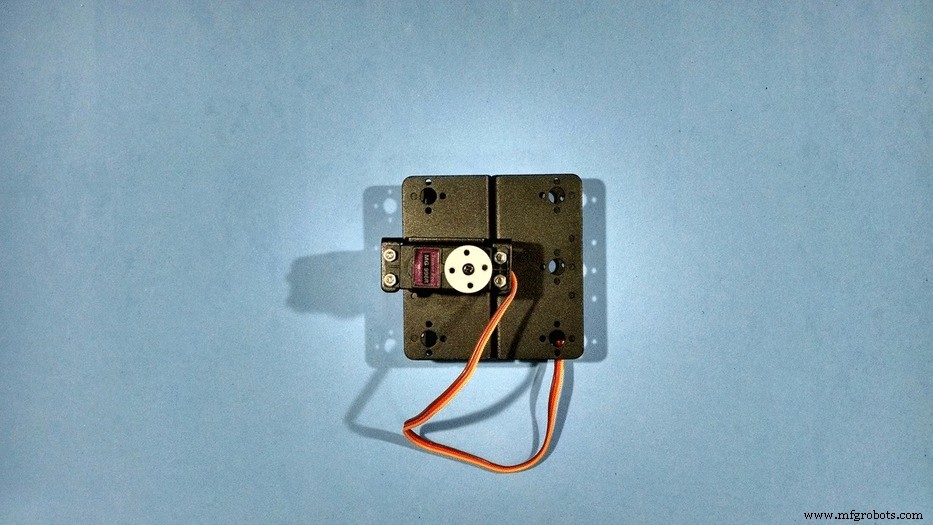
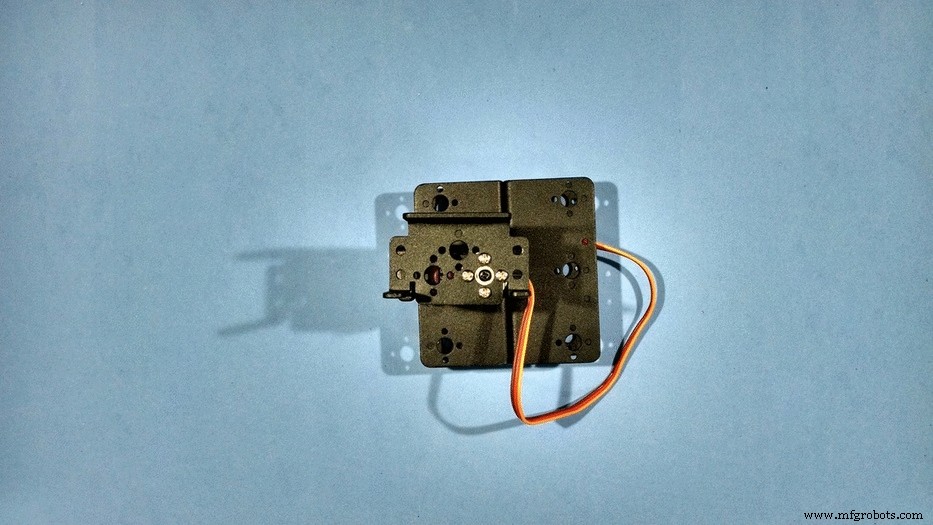
Шаг 3. Сборка роботизированной руки Pt2 - серво №1
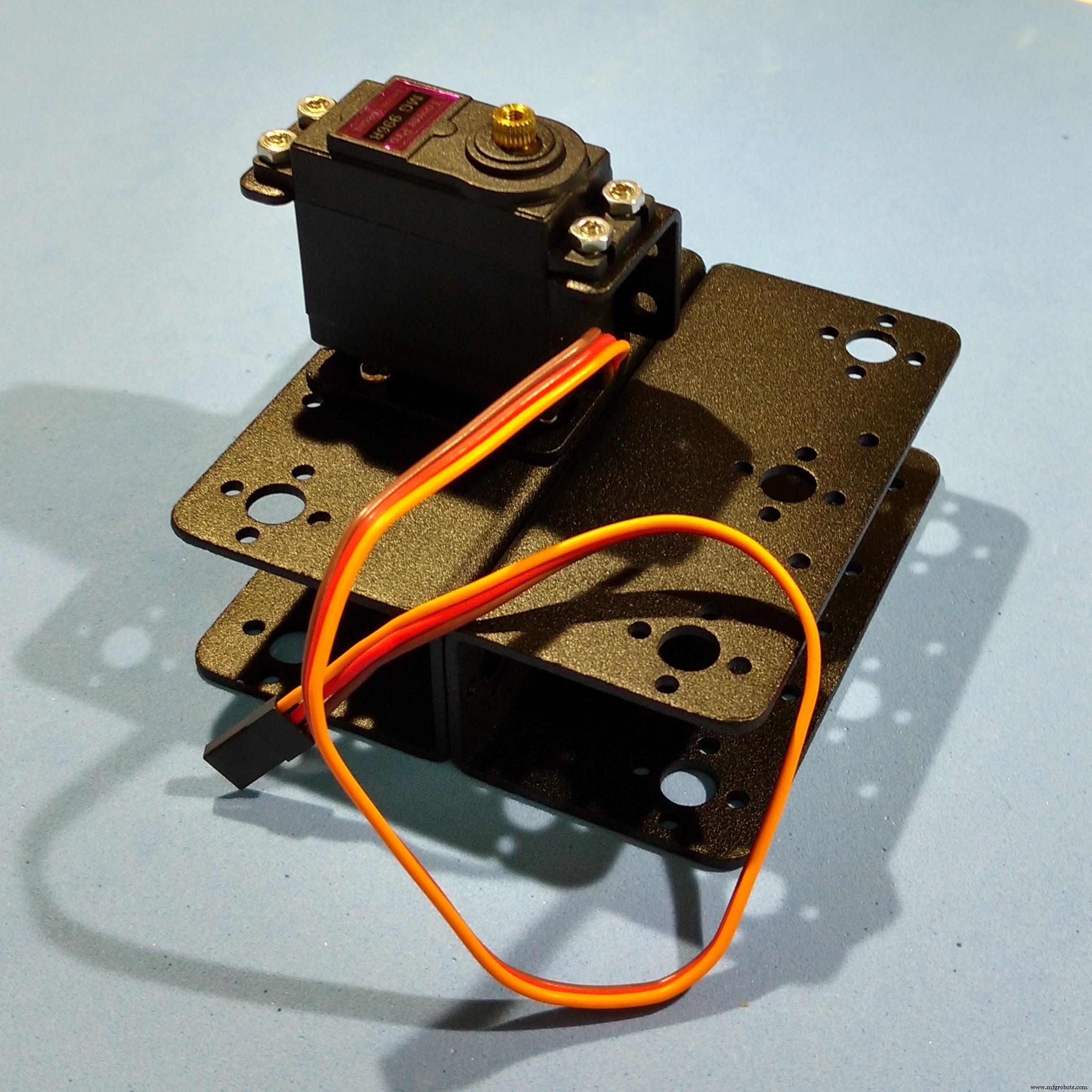
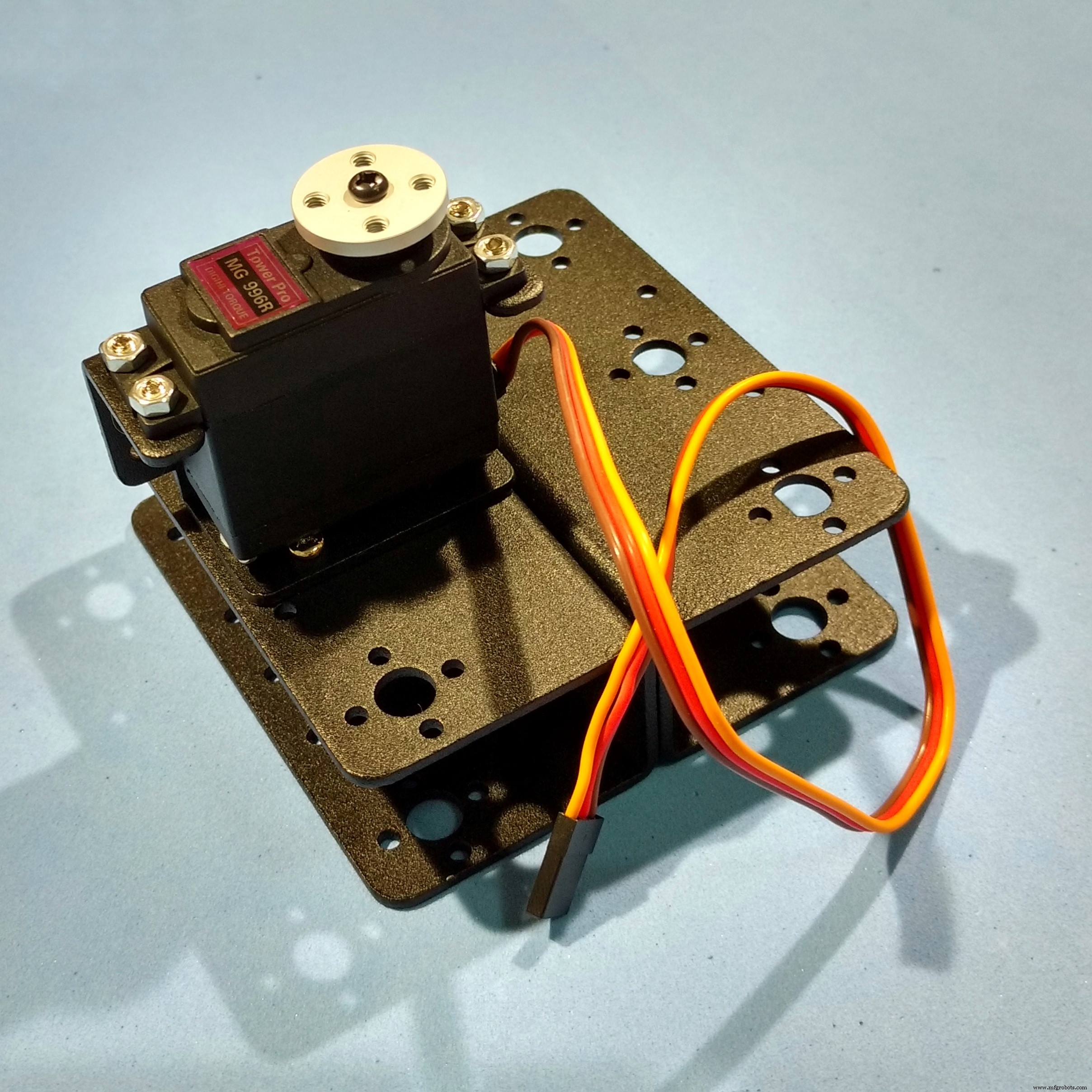
Первый серводвигатель устанавливается перпендикулярно основанию с помощью кронштейна сервопривода. Этот профиль крепится к основанию с помощью четырех болтов и гаек M3, как показано на рисунках. Сервопривод №1 размещается сверху и крепится с помощью четырех болтов и гаек M3.
К сервооси прикреплен круглый металлический рог. В комплекте идет несколько пластиковых рожков. Они не будут использоваться для сборки робота.
Шаг 4:Сборка роботизированного манипулятора Pt3 - серво №2
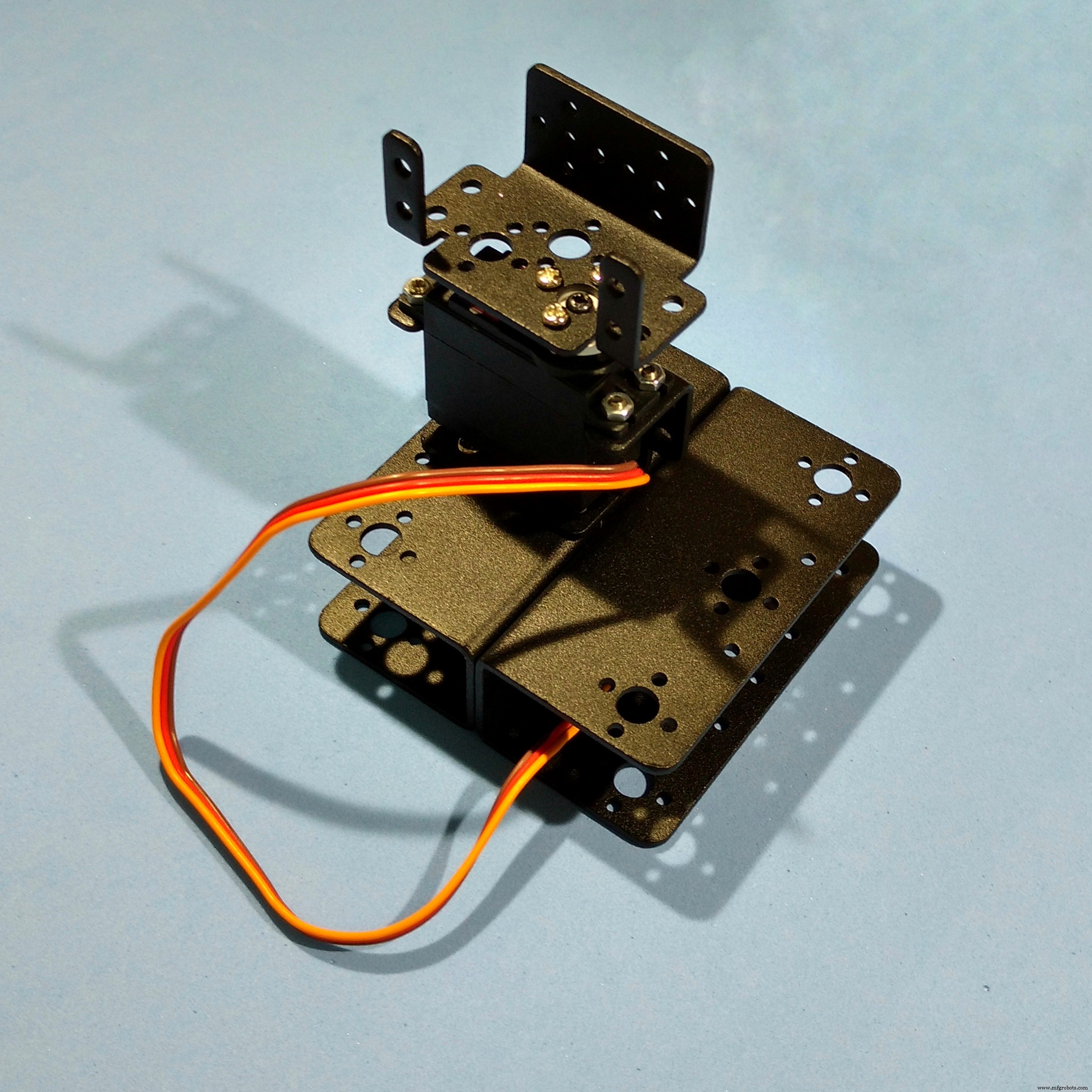
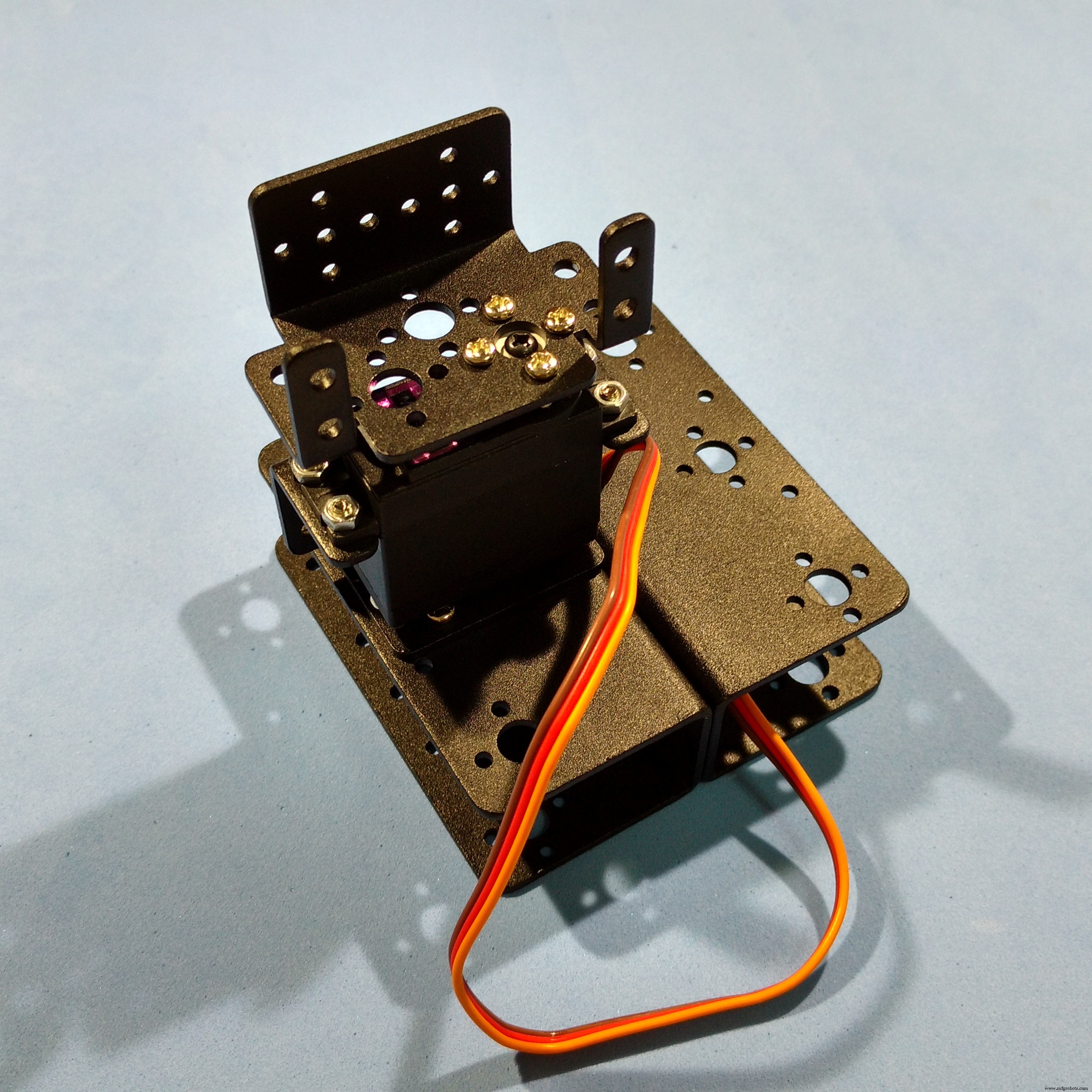

Другой кронштейн сервопривода устанавливается перпендикулярно предыдущему. Он соединен с рогом сервопривода №1 с помощью четырех болтов M3. Сервопривод №2 устанавливается с помощью четырех болтов и гаек M3, а также использует круглый металлический рупор.
Затем к рупору с помощью четырех болтов прикрепляется U-образный кронштейн. Обратите внимание, что вместо оси сервопривода используется болт M3. Придает устойчивость конструкции. На этот болт устанавливается подшипник, который фиксируется другой гайкой M3. Таким образом, U-образный кронштейн плотно прикреплен к центральной оси сервопривода №2.
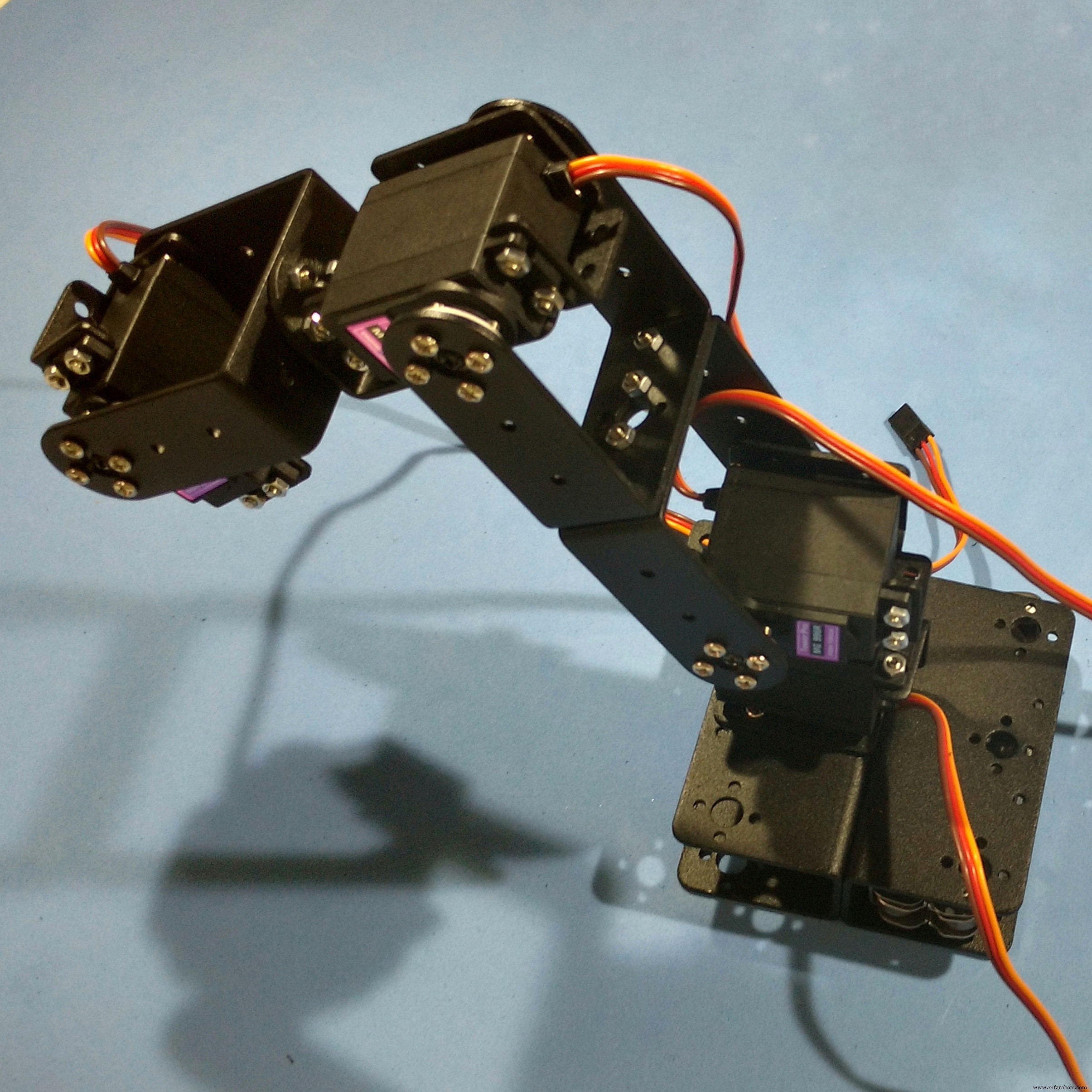
Шаг 5:Сборка роботизированной руки Pt4 - серво №3
Другой U-образный кронштейн крепится с помощью четырех болтов и гаек M3.
На другом конце установлен сервопривод №3 с использованием круглого металлического рупора и четырех болтов. К сервомотору подсоединен кронштейн сервопривода, а L-образный профиль соединен с кронштейном сервопривода с помощью нескольких болтов и гаек.
Обратите внимание, что другой подшипник используется напротив сервооси, как описано ранее.
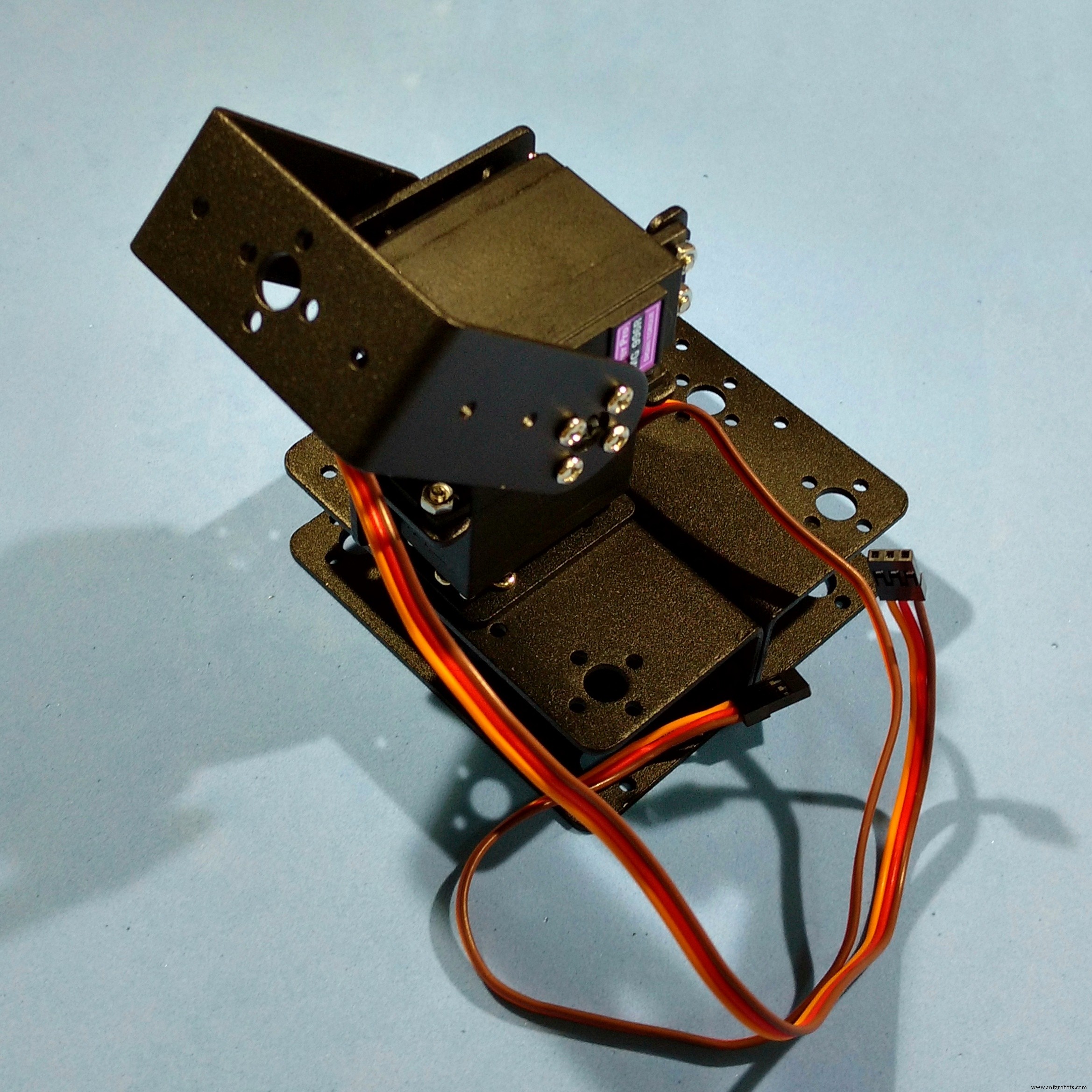
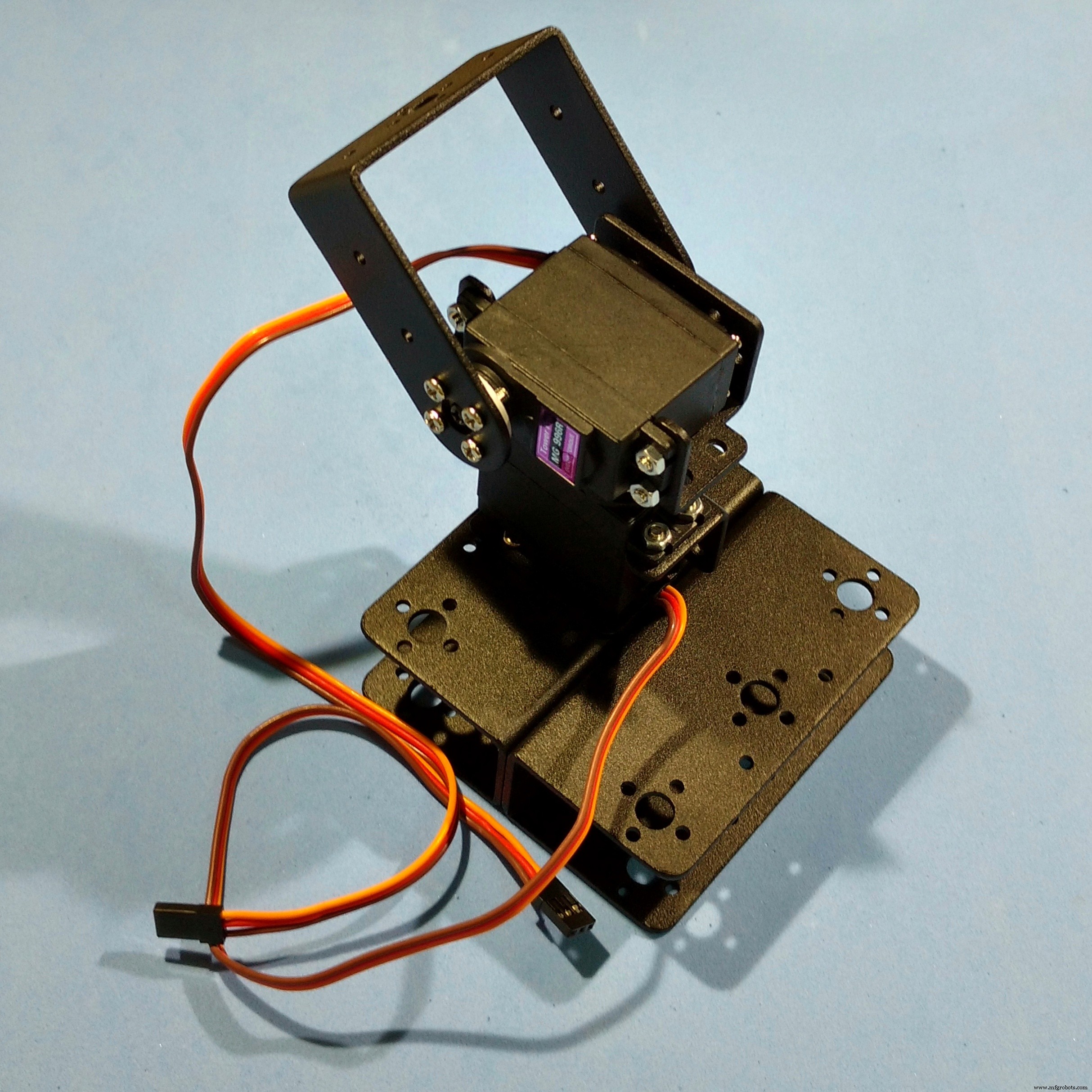
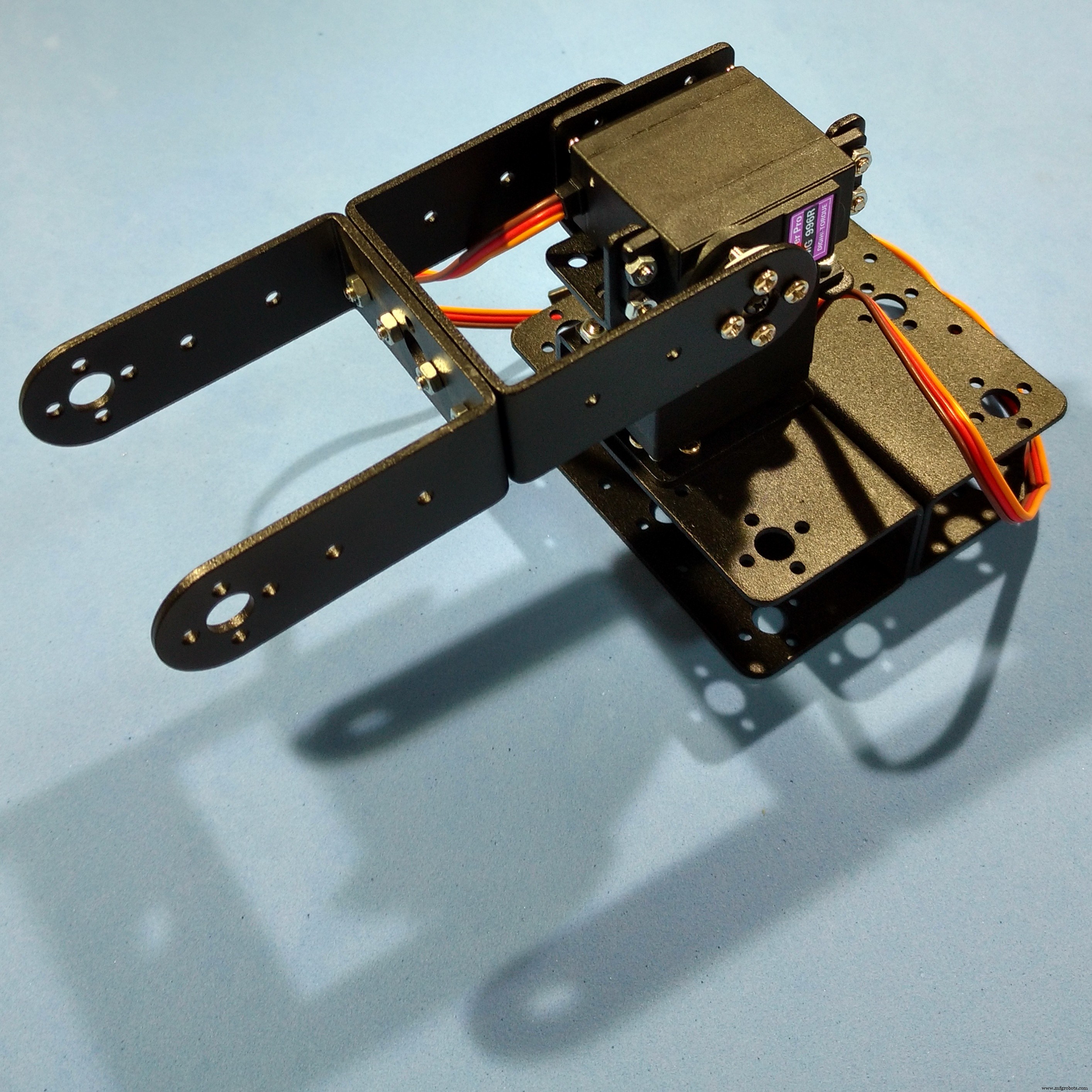
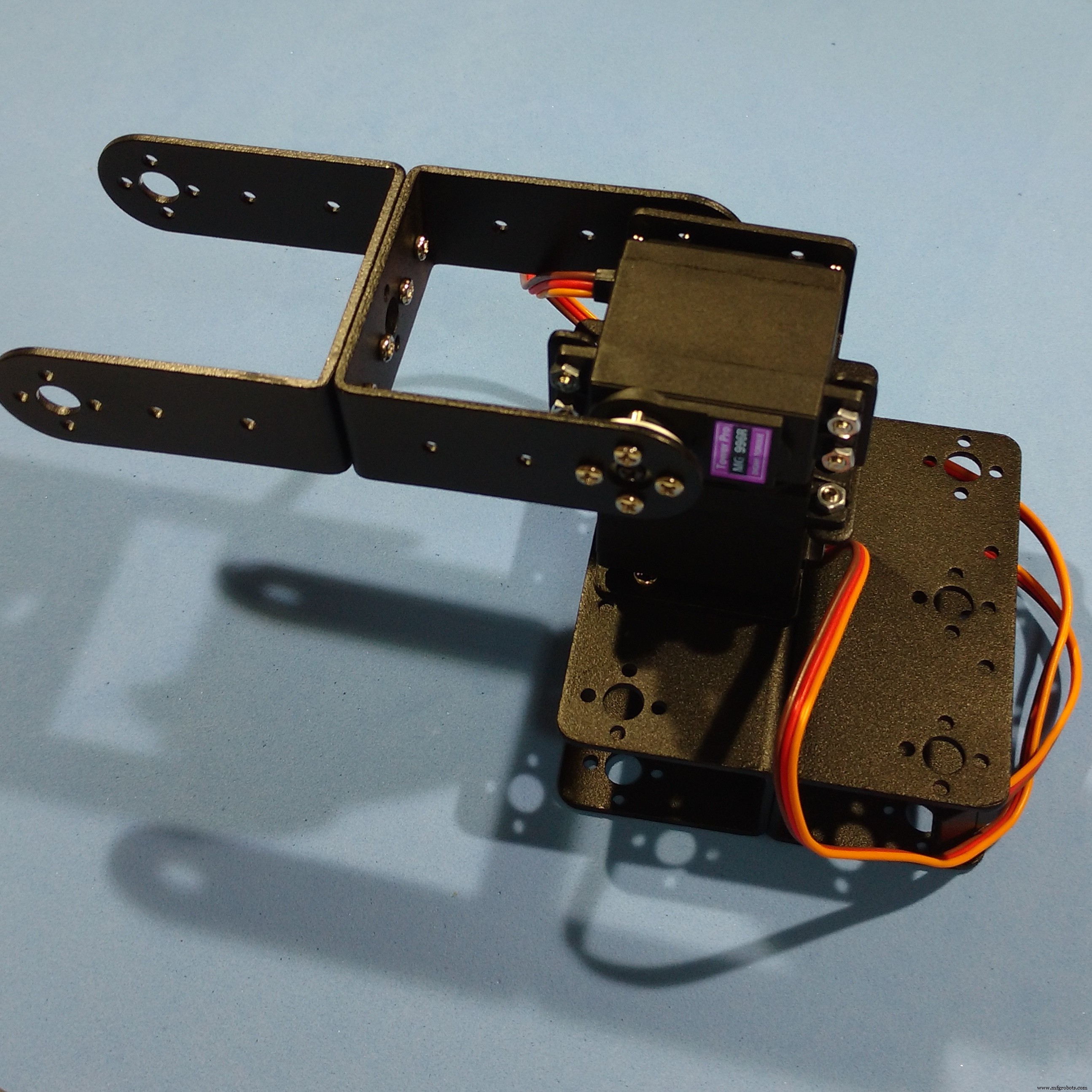
Шаг 6:Сборка роботизированной руки Pt4 - серво №4
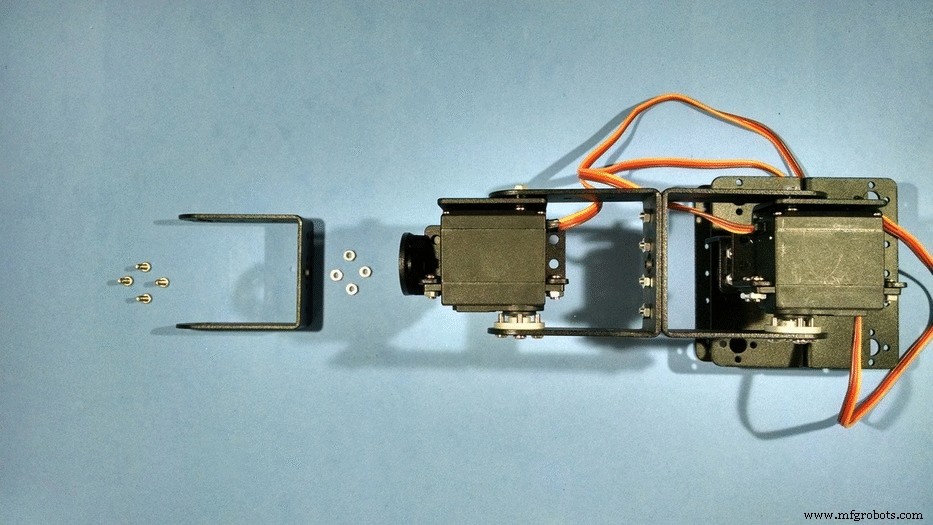
Другой U-образный кронштейн соединяется с L-образным профилем с помощью набора из четырех болтов M3 и гаек. Как и в предыдущем шаге, сервопривод № 4 монтируется к U-образному кронштейну с помощью четырех болтов. Другой кронштейн сервопривода соединен с сервоприводом.
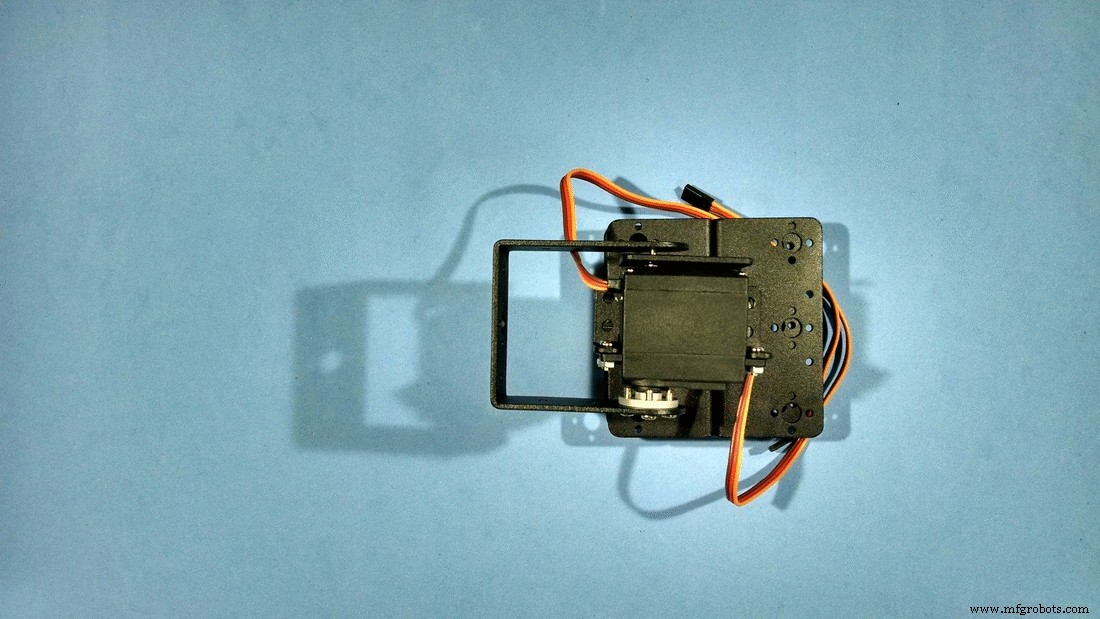
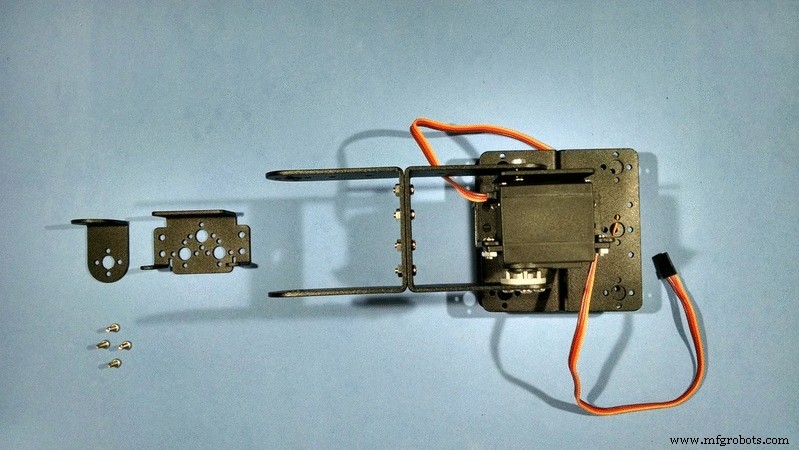
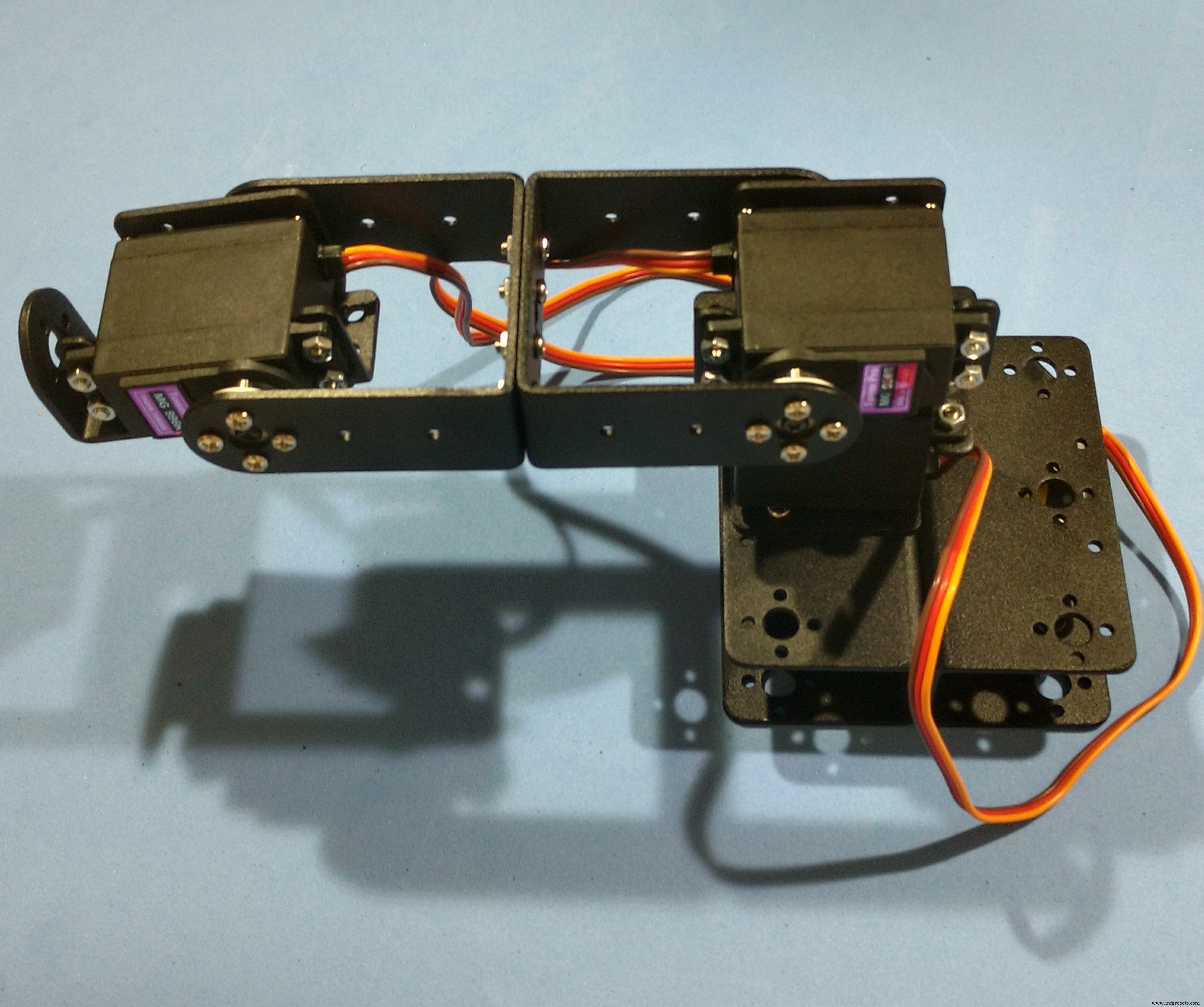
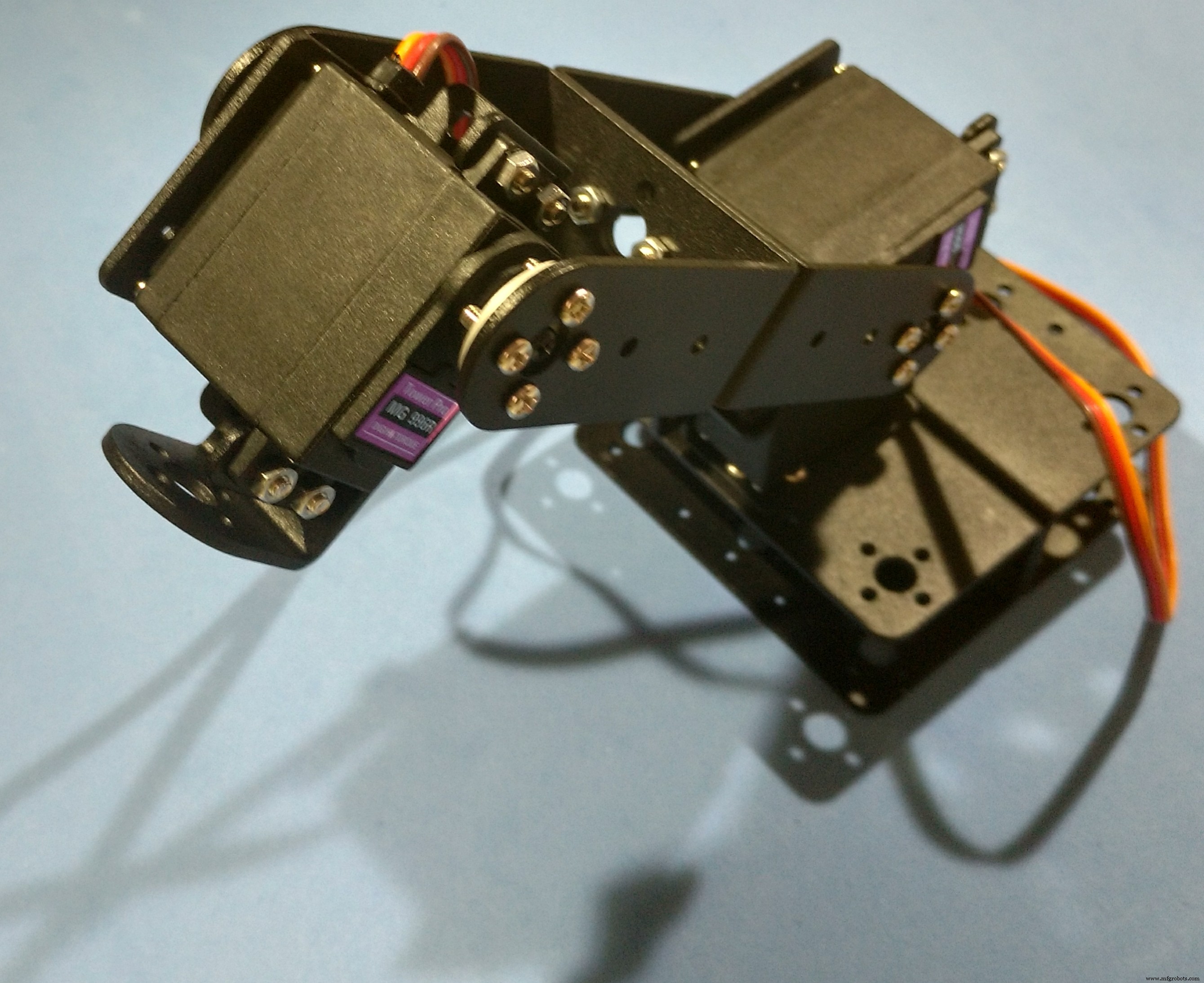
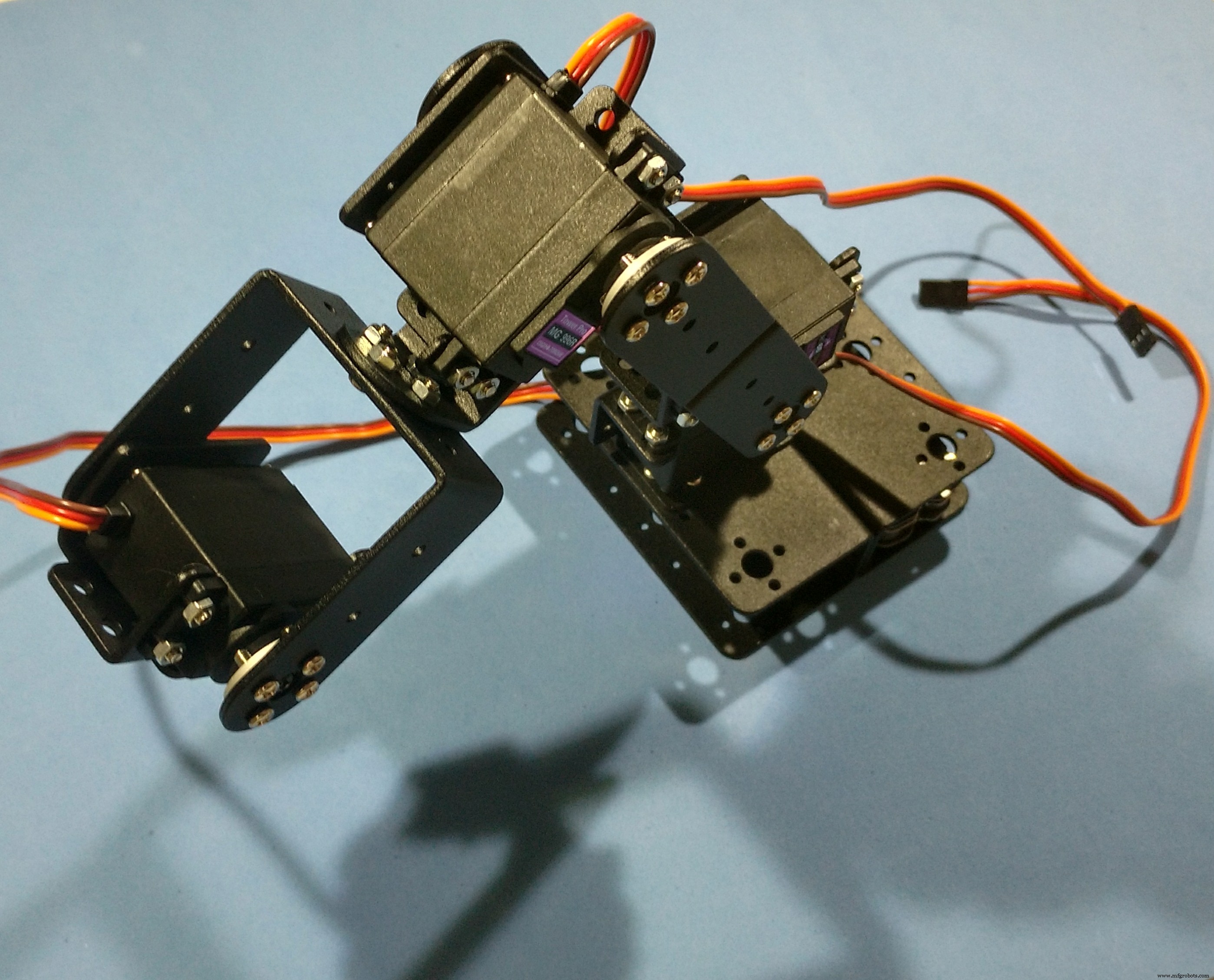
Шаг 7. Сборка роботизированной руки Pt4 - серво №5
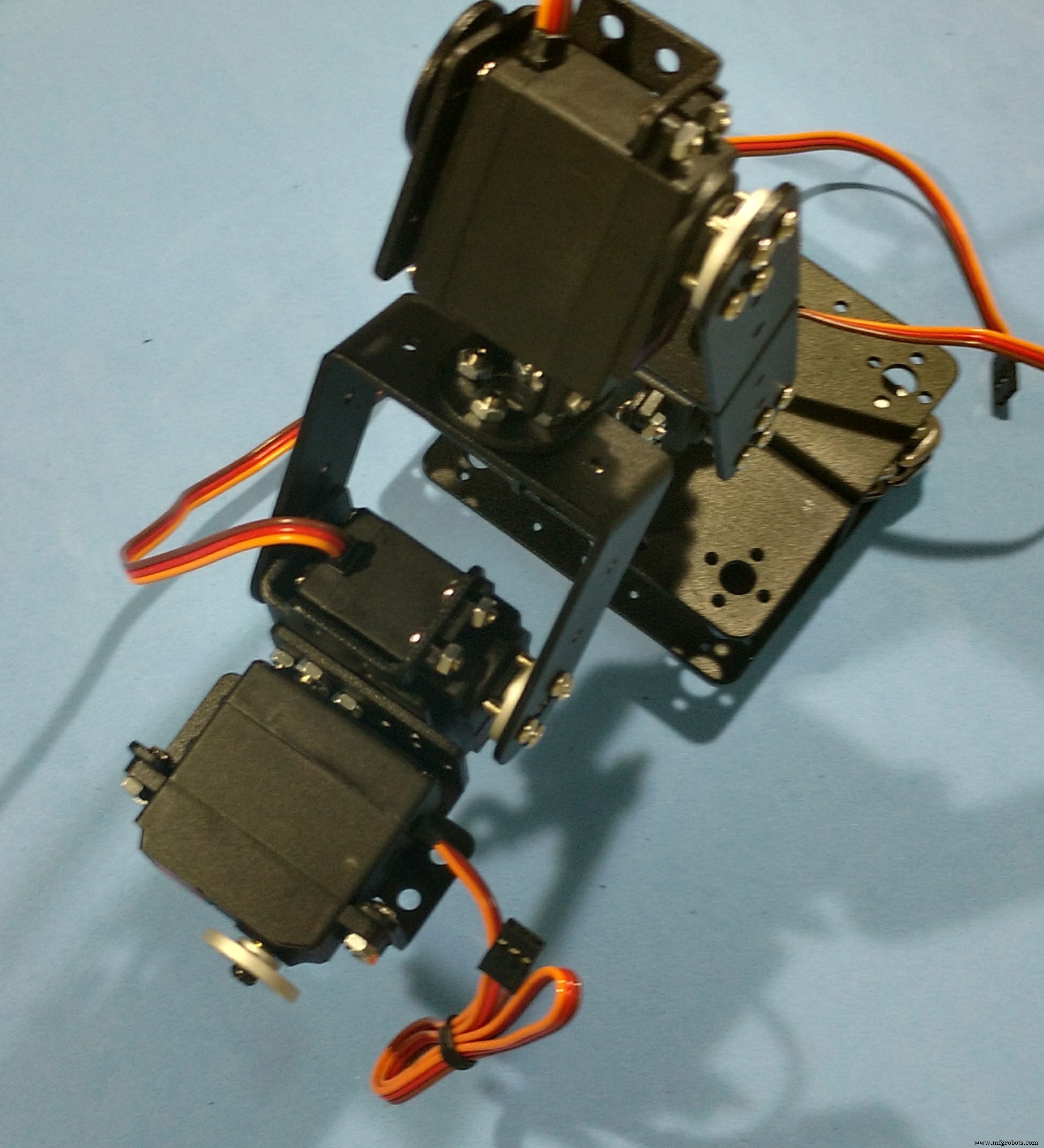

Пятый сервопривод соединен перпендикулярно сервоприводу №4 с помощью другого кронштейна сервопривода, установленного с помощью четырех болтов M3 и гайки.
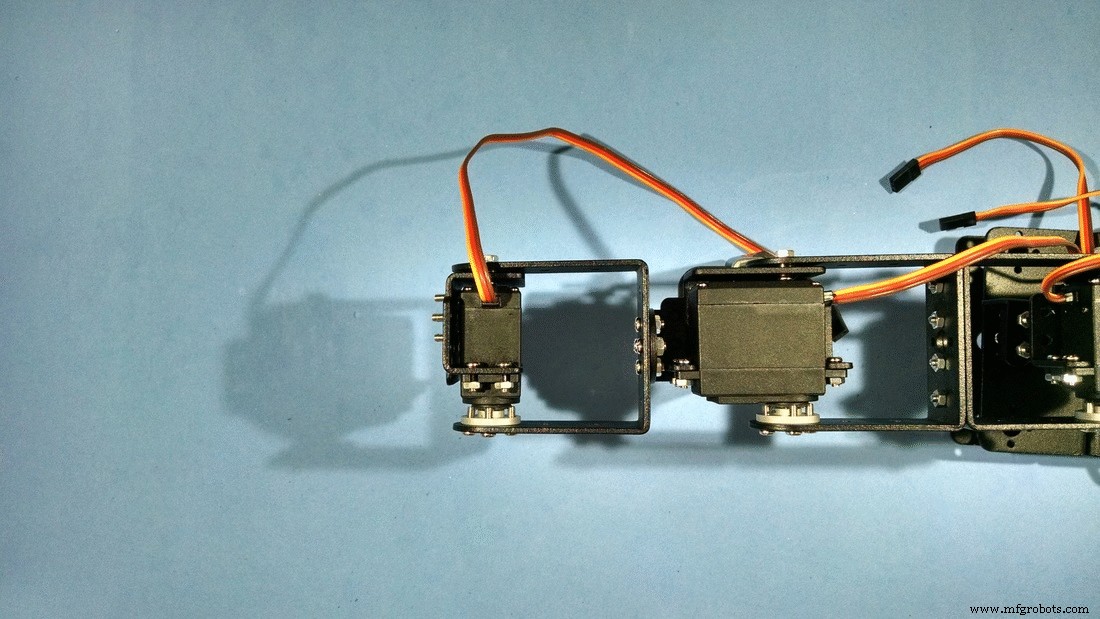
Шаг 8:Сборка роботизированной руки Pt4 - серво №6
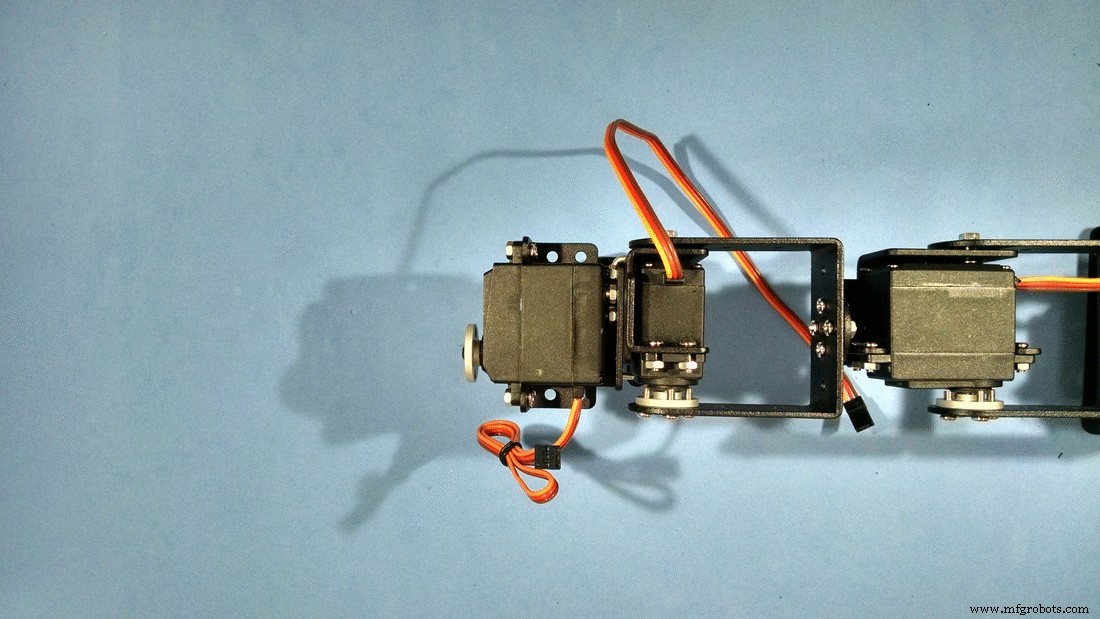
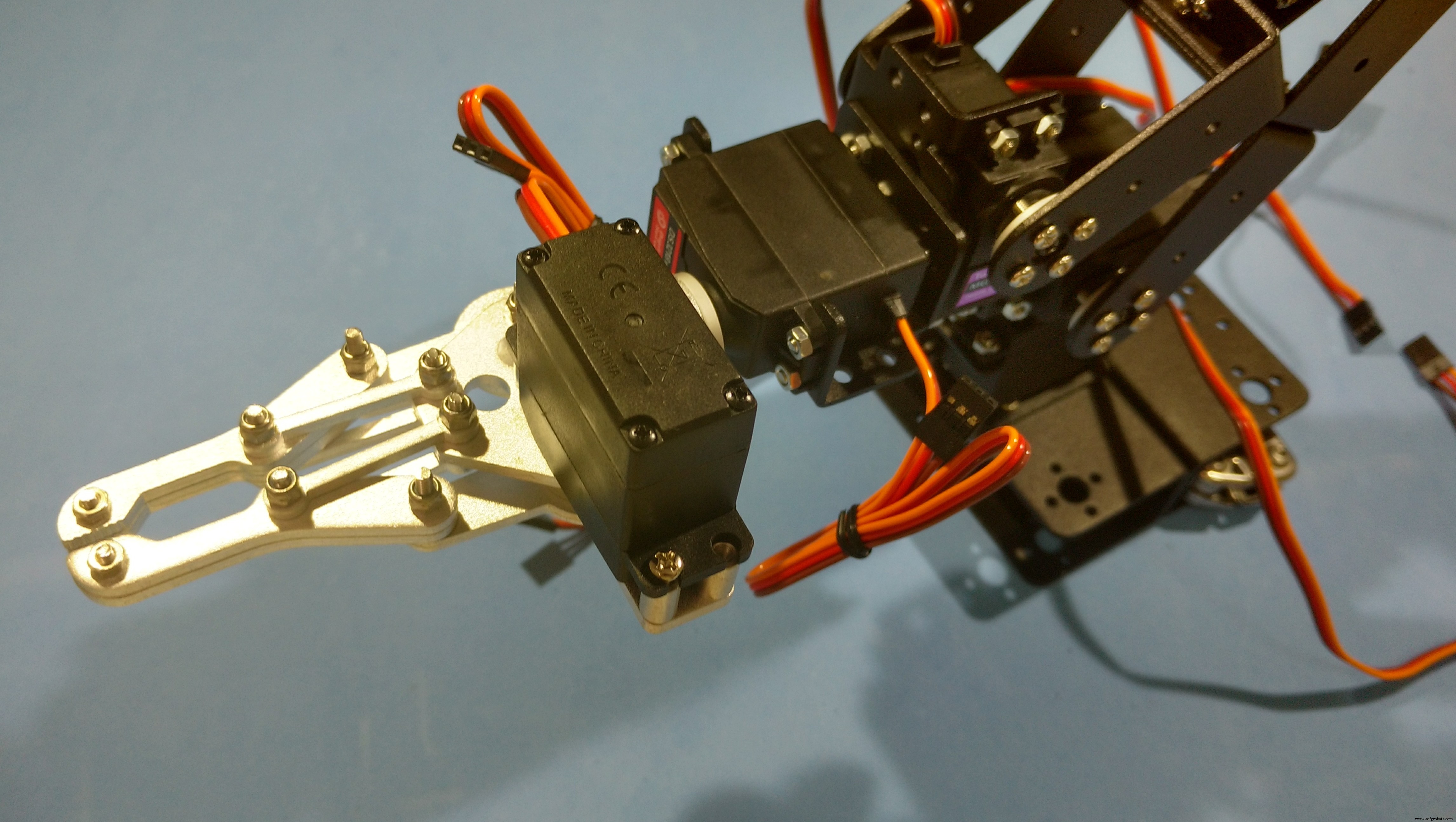
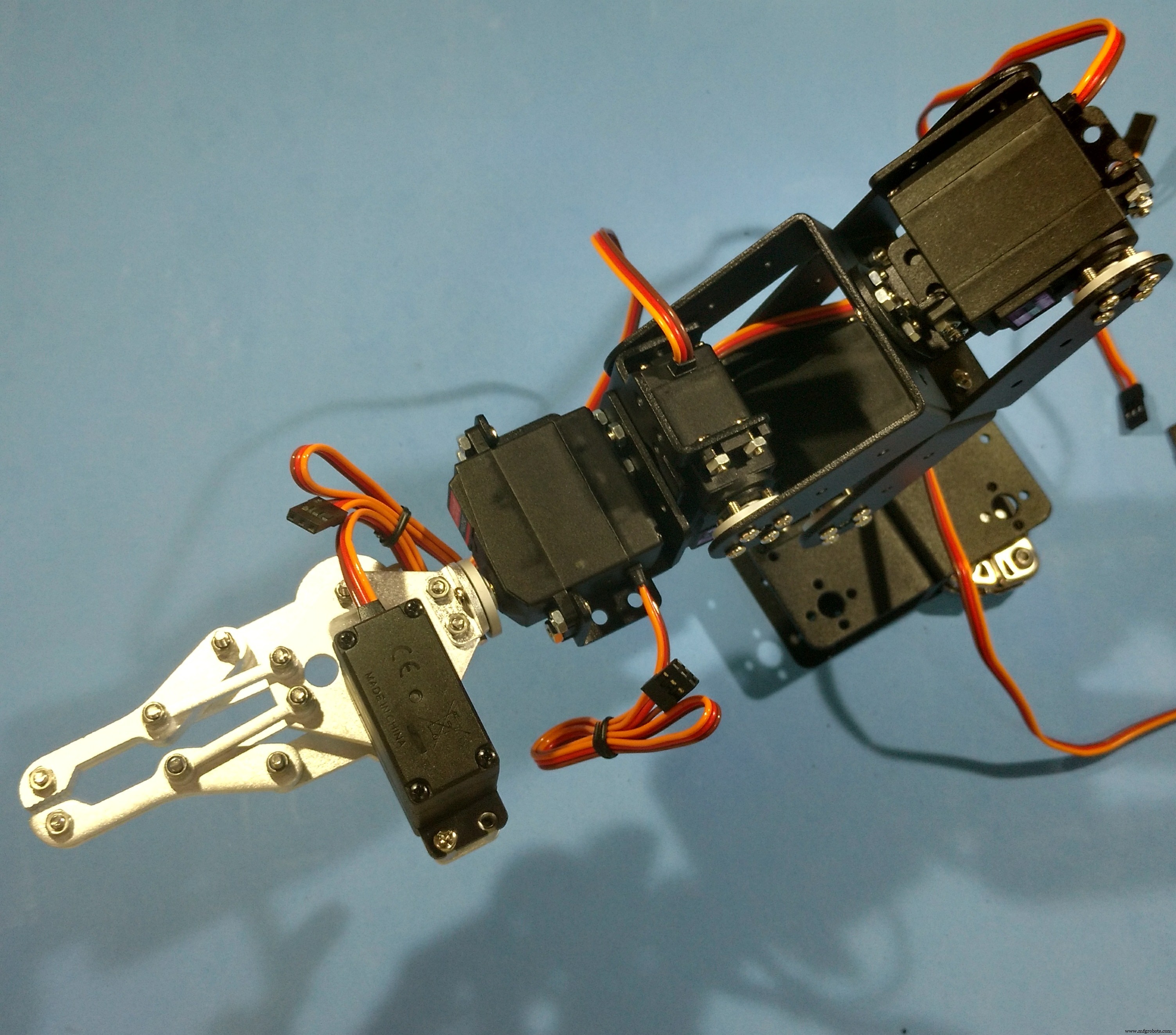
Затем захват подключается к оси сервопривода №5. Сверху сервопривод №6 подключен с помощью нескольких болтов, гаек и металлического рожка. Захват имеет несколько шестерен, которые превращают вращение сервопривода в линейное движение захвата.
Шаг 9:Подготовка контроллера Nunchuk

В этом проекте я решил использовать контроллер Nintendo Nunchuk по ряду причин:
- Они дешевые! Реплики могут иметь худшее качество, но для этого проекта мне не нужен надежный контроллер;
- Их легко найти! В сети есть несколько оригинальных и недорогих реплик.
- У него много датчиков! Каждый контроллер имеет две кнопки (кнопки Z и C), двухосевой джойстик (X и Y) и трехосный акселерометр;
- В нем есть библиотека Arduino. Роберт Эйзеле разработал удивительную и простую в использовании библиотеку для чтения сенсора Nunchuk. Проверьте это:https://www.xarg.org/2016/12/using-a-wii-nunchuk-with-arduino/
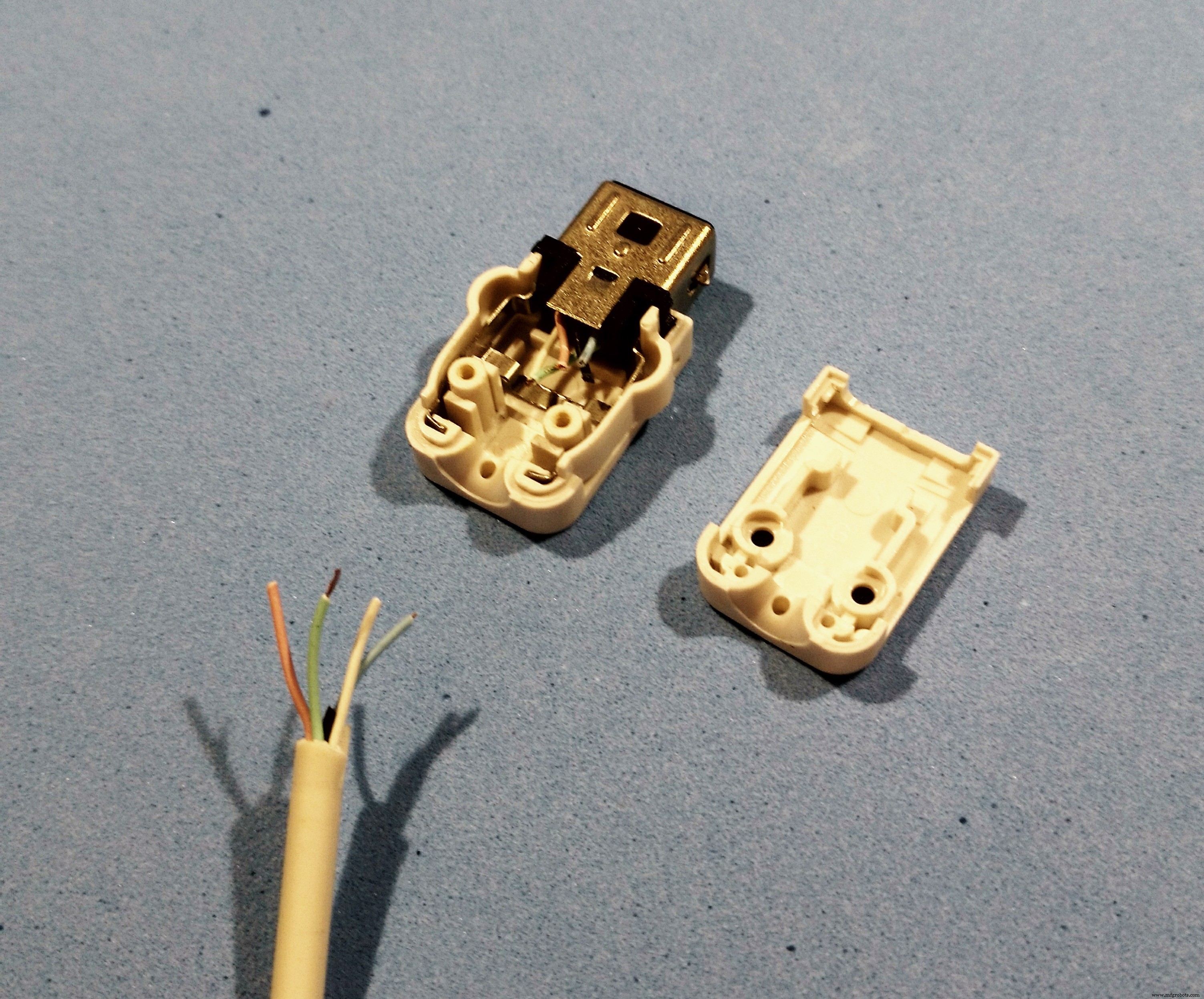
К сожалению, джойстики Nunchuk имеют сложный разъем, с которым трудно взаимодействовать с другой электроникой. Чтобы подключить его к Arduino, мне пришлось разрезать его кабель и обнажить провода. Таким образом, он больше не будет работать с Nintendo Wii ...:/
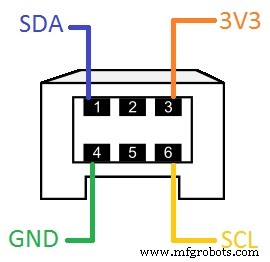
Сначала пришлось разрезать разъем джойстика и снять изоляцию с проводов. Используя мультиметр и основываясь на цвете каждого провода, я определил функцию каждого провода (Vcc, GND, SCL и SDA) на основе схемы разъема, показанной на рисунке. Цвет проводов не имеет стандарта. Я уже слышал о следующих возможностях:
Исходный:
- SDA =зеленый
- SCL =желтый
- 3V3 =красный
- GND =белый
Реплика №1:
- SDA =желтый
- SCL =белый
- 3V3 =зеленый
- GND =красный
Реплика № 2:
- SDA =синий
- SCL =белый
- 3V3 =розовый
- GND =зеленый
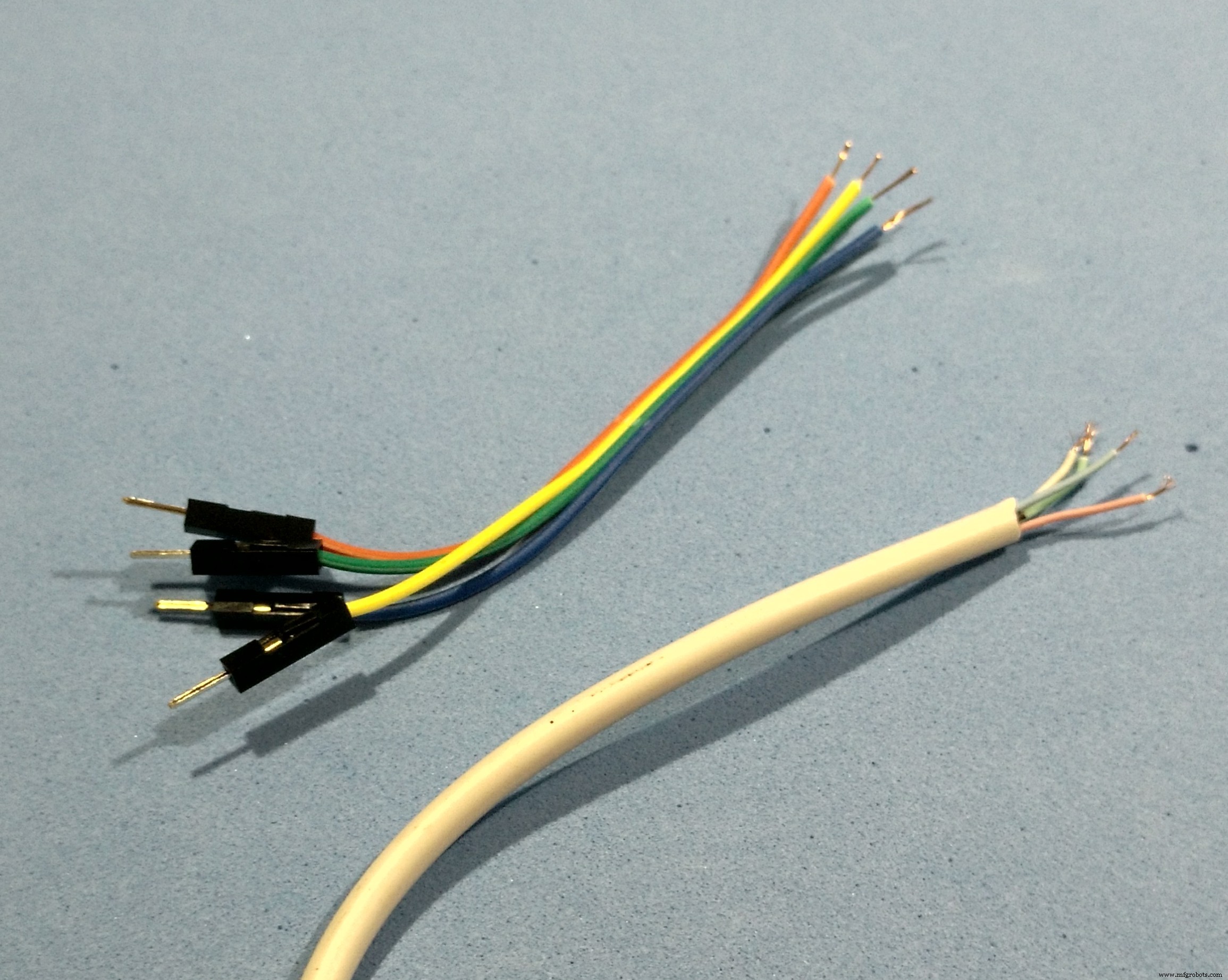
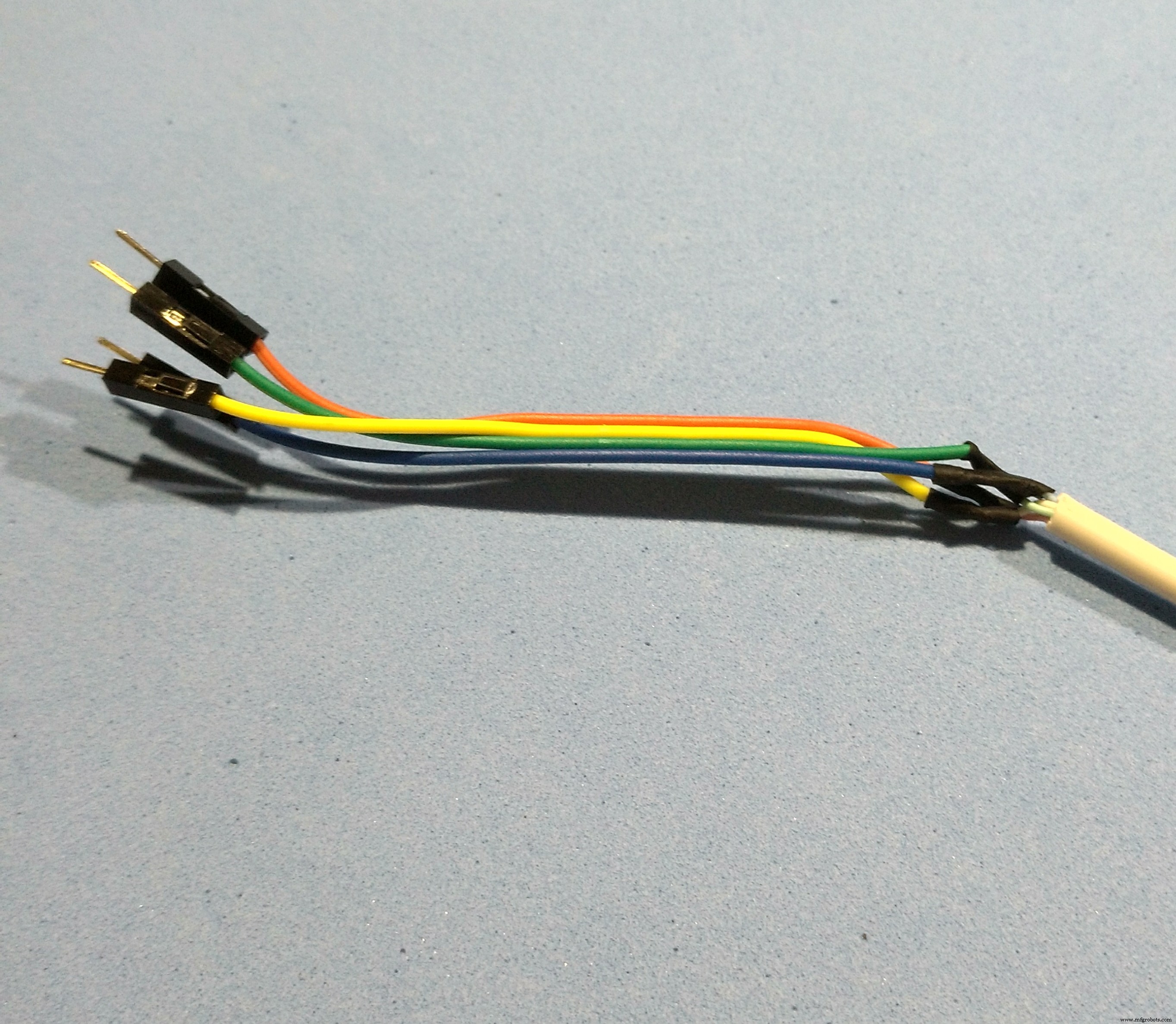
Я припаял провода к перемычке «папа», чтобы упростить подключение к плате Arduino. Для этого я использовал паяльник и термоусадочную трубку, как показано на фотографиях.
Позже мне сообщили, что есть адаптер Nunchuk, который упрощает подключение к макету (ссылка / ссылка). Это хороший вариант, если вы хотите немного потратиться на пайку и не хотите разрушать исходный разъем.
Шаг 10:Подключение цепей
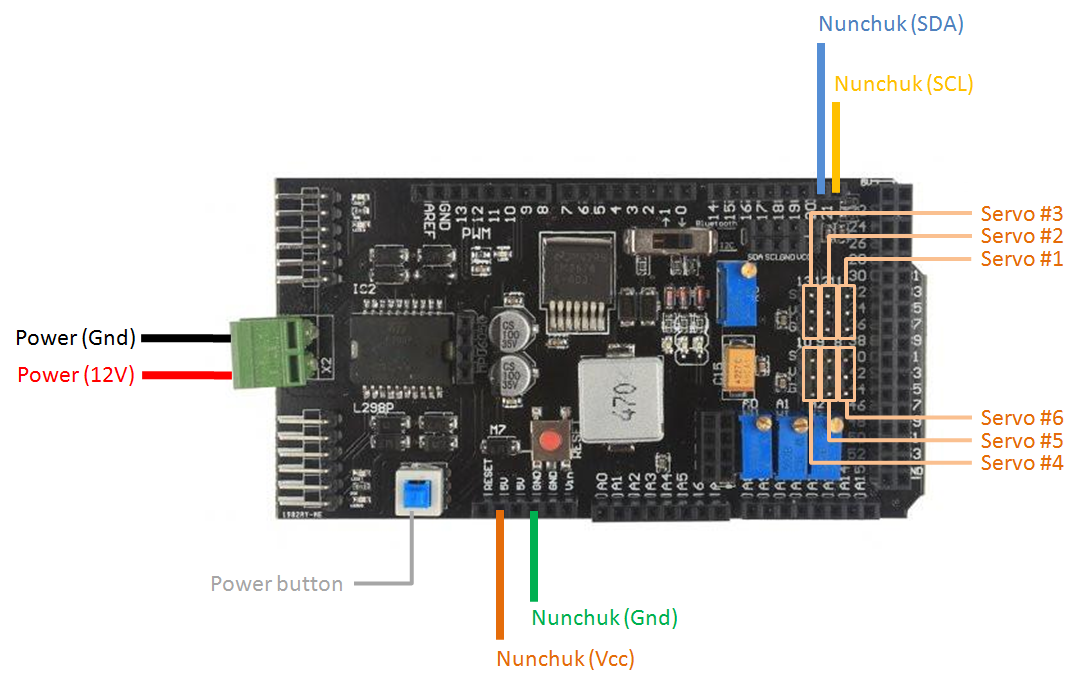
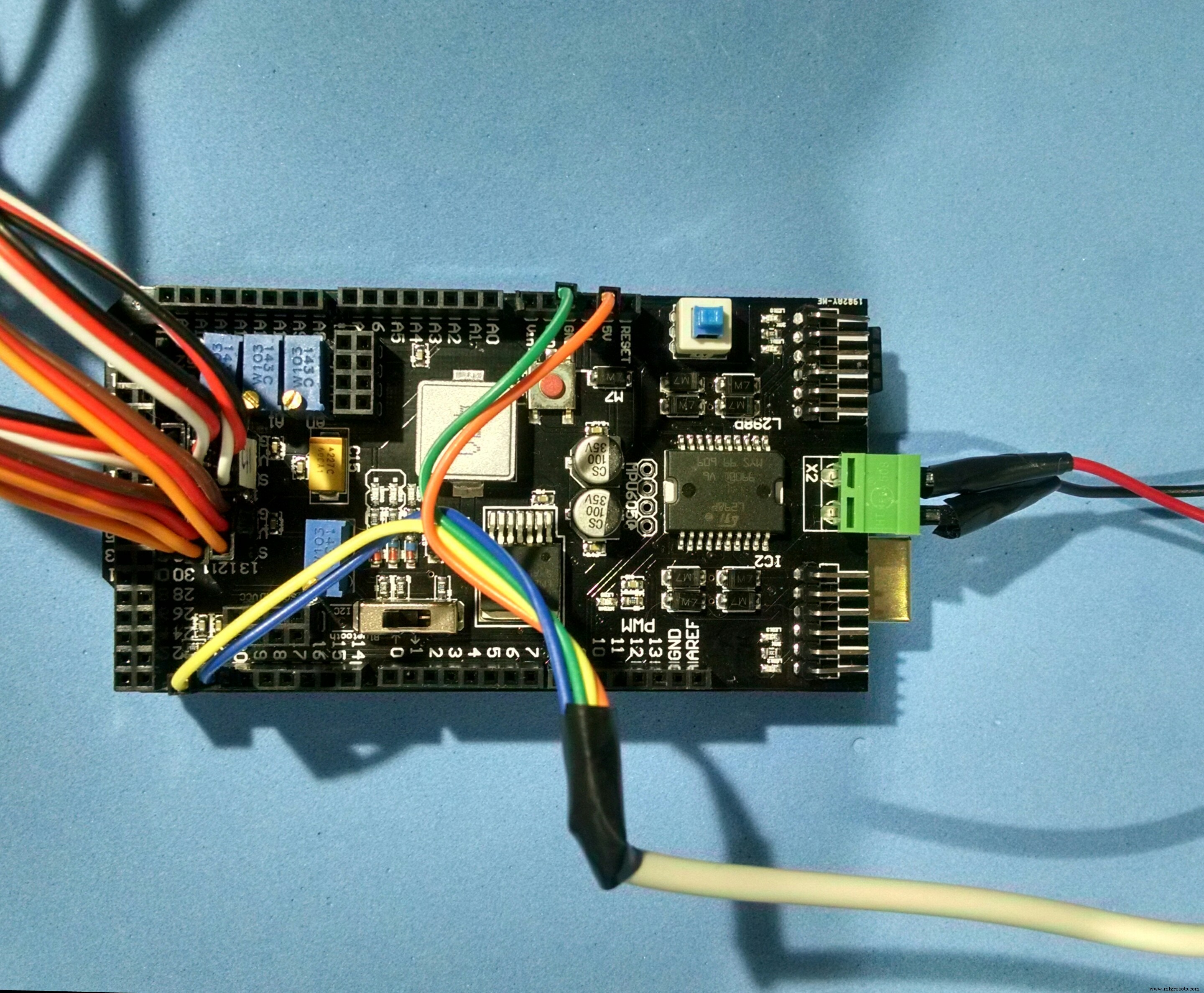
После того, как конструкция будет собрана и соединители Nunchuk готовы, вы будете готовы к подключению цепей. Я использовал щиток платы управления, который шел вместе с моим роботизированным манипулятором. Он упрощает подключение компонентов, поскольку в нем уже есть специальные разъемы для серводвигателей, источника питания и т. Д.
Соедините компоненты следующим образом:
Нунчук:
- Нунчук контакт 6 (SCL) => Arduino Mega Pin 21 (SCL) (на щите)
- Вывод Nunchuk 1 (SDA) => Вывод 20 Arduino Mega (SDA) (на щите)
- Нунчук контакт 3 (Vcc) => Ardino Mega Pin 3V3 (на щите)
- Нунчук контакт 4 (Gnd) => Arduino Mega Pin Gnd (на щите)
Если вы используете Arduino Uno, выводы Nunchuk SCL и SDA должны быть подключены к разным выводам Arduino следующим образом:
- Контакт Nunchuk 6 (SCL) => Контакт Arduino Uno A5
- Вывод Nunchuk 1 (SDA) => Вывод Arduino Uno A4
- Пин 3 Nunchuk (Vcc) => Пин 3V3 Ardino Uno
- Контакт Nunchuk 4 (Gnd) => Контакт Arduino Uno, Gnd
Сервоприводы:
- Клемма 11 экрана управления => Сервопривод №1
- Клемма 12 экрана управления => Сервопривод №2
- Клемма 13 экрана управления => Сервопривод №3
- Клемма 8 экрана управления => Сервопривод №4
- Клемма щита управления 9 => Сервопривод №5
- Клемма щита управления 10 => Сервопривод №6
Если вы не используете экран управления, вам следует использовать следующую конфигурацию контактов:
- Вывод 11 Arduino => Сервопривод №1 (Sgn)
- Контакт 12 Arduino => Сервопривод №2 (Sgn)
- Вывод 13 Arduino => Сервопривод №3 (Sgn)
- Контакт 8 Arduino => Сервопривод №4 (Sgn)
- Вывод 9 Arduino => Сервопривод 5 (Sgn)
- Контакт 10 Arduino => Сервопривод №6 (Sgn)
- Arduino Gnd => Земля сервоприводов
- Источник питания 6 В => Сервоприводы Vcc
Вам также потребуется подключить внешний блок питания 12 В. Я предлагаю один с выходом более 2А. Сервоприводы потребляют много энергии, и если источник питания недостаточно мощный, сервоприводы будут вибрировать и сильно нагреваться. Они также потеряют свою силу.
Не подключайте источник питания до тех пор, пока вы не загрузите код Arduino (как показано ниже). На щите есть кнопка включения. Держите его в выключенном состоянии.
Подключите USB-кабель к Arduino и переходите к следующему шагу.
Шаг 11:Установите Arduino IDE

Теперь, когда оборудование готово, пора поработать над кодом Arduino.
1. Загрузите и установите последнюю версию Arduino IDE Вы можете найти последнюю версию для Windows, Linux или MAC OSX на веб-сайте Arduino:https://www.arduino.cc/en/main/software
Загрузите его бесплатно, установите на свой компьютер и запустите.
2. Добавление библиотек
Для этого проекта я использовал удивительную библиотеку Nunchuk Arduino Роберта Эйзеля! Вы можете узнать об этом больше на его сайте:
https://www.xarg.org/2016/12/using-a-wii-nunchuk-with-arduino/
Загрузите библиотеку по адресу https://github.com/infusion/Fritzing/tree/master/Wii-Nunchuk
Перейдите в Sketch-> Включить библиотеку -> Управление библиотеками ... в вашей среде разработки Arduino для добавления библиотеки.
Как работает библиотека?
В библиотеке Nunchuk есть набор функций для чтения датчиков контроллера:
nunchuk_buttonZ () :возвращает 1, если кнопка Z нажата, или 0, если нет; nunchuk_buttonC () :возвращает 1, если кнопка C нажата, или 0, если нет; nunchuk_joystickX () :возвращает значение x джойстика (от -127 до 127); nunchuk_joystickY () :возвращает значение y джойстика (от -127 до 127); nunchuk_pitch () :возвращает угол регулятора в радианах (от -180º до 180º); nunchuk_roll () :возвращает угол крена регулятора в радианах (от -180º до 180º).
Углы возвращаются в радианах. Я преобразовал эти значения в градусы в моем коде Arduino.
Шаг 12:Код Arduino

Загрузите файл эскиза Arduino.
Подключите USB-кабель к USB-порту вашего компьютера и загрузите код. Загрузка кода занимает некоторое время. Вы можете использовать это время, чтобы поставить лайк и поделиться этим уроком, пока ждете! :D
После завершения загрузки отсоедините USB-кабель, подключите источник питания и включите кнопку питания. Код начнет работать немедленно.
Предупреждение:когда запускается код, робот-манипулятор очень быстро перемещается в исходное положение. Будьте осторожны, чтобы не получить травму и не повредить находящееся поблизости оборудование во время запуска!
Возможно, вам придется заменить начальный угол каждого серводвигателя в зависимости от того, как установлены ваши сервоприводы.
Объяснение кода:
Перед настройкой код импортирует библиотеки, используемые в скетче ( nunchuk.h, wire.h и servo.h ).
Определяются используемые выводы и объявляются глобальные переменные. угол # Целочисленные переменные хранят начальную позицию для каждого сервопривода. Если вы хотите, чтобы ваш робот начинал с другой позиции, измените значения этих переменных.
серво # _speed переменные определяют скорость движения каждого сервопривода. Если вы хотите, чтобы конкретный сервопривод двигался быстрее, увеличьте его значение. угол # мин и угол # макс. переменные используются для ограничения максимального и минимального угла для каждого сервопривода. Вы можете установить эти переменные, чтобы избежать столкновений между последовательными суставами робота.
// Включаем библиотеки # include #include #include // определяем переменные # define SERV1 8 // серво 1 на цифровом порте 8 # define SERV2 9 // серво 2 на цифровом порте 9 # определение SERV3 10 // серво 3 на цифровом порте 10 # определение SERV4 11 // серво 4 на цифровом порте 11 # определение SERV5 12 // серво 5 на цифровом порте 12 # определение SERV6 13 / / servo 6 на цифровом порту 13Servo s1; // серво 1Servo s2; // серво 2Servo s3; // сервопривод 3Servo s4; // сервопривод 4Servo s5; // серво 5Servo s6; // сервопривод 6 // определение начального угла для каждого сервопривода // выбор безопасного положения для старта // он будет пытаться мгновенно переместиться в это положение при включении! // эти углы будут зависеть от угла каждого сервопривода во время угол сборки1 =90; // текущий угол сервопривода 1int angle2 =30; // текущий угол сервопривода 2int angle3 =0; // текущий угол сервопривода 3int angle4 =90; // текущий угол сервопривода 4int angle5 =90; // текущий угол сервопривода 5int angle6 =45; // текущий угол сервопривода 6 int servo1_speed =3; // скорость сервопривода 1 servo2_speed =3; // скорость сервопривода 2 servo3_speed =3; // скорость сервопривода 3 servo4_speed =1; // скорость сервопривода 4 servo5_speed =1; // скорость сервопривода 5 // определение ограничений для каждого сервопривода // эти углы будут зависеть от угла каждого сервопривода во время сборки angle1min =0; // минимальный угол сервопривода 1int angle1max =180; // максимальный угол сервопривода 1int angle2min =0; // минимальный угол сервопривода 2int angle2max =180; // максимальный угол сервопривода 2int angle3min =0; // минимальный угол сервопривода 3int angle3max =180; // максимальный угол сервопривода 3int angle4min =0; // минимальный угол сервопривода 4int angle4max =180; // максимальный угол сервопривода 4int angle5min =0; // минимальный угол сервопривода 5int angle5max =180; // максимальный угол сервопривода 5int angle6min =0; // минимальный угол сервопривода 6int angle6max =180; // максимальный угол сервопривода 6boolean display_angles =true; // логическое значение, используемое для обновления угла каждого сервопривода на последовательном мониторе Во время настройки каждый сервопривод прикрепляется к определенному выводу, и его позиция запускается.
Здесь также запускается последовательная связь (с последовательным монитором) и связь I2C с Nunchuk.
// SETUPvoid setup () {// прикрепляем каждый сервопривод к выводу и запускаем его позицию s1.attach (SERV1); s1.write (угол1); s2.attach (SERV2); s2.write (angle2); s3.attach (SERV3); s3.write (angle3); s4.attach (SERV4); s4.write (angle4); s5.attach (SERV5); s5.write (angle5); s6.attach (SERV6); s6.write (angle6); // запускаем последовательную связь Serial.begin (9600); // запускаем Nunchuk Wire.begin (); nunchuk_init ();} Основной цикл повторяется снова и снова. Статус нунчука считывается на каждом цикле. В зависимости от показаний выполняются разные команды.
void loop () {// считываем датчики Nunchuk if (nunchuk_read ()) {int x =nunchuk_joystickX (); // положение джойстика по оси X int y =nunchuk_joystickY (); // положение джойстика по оси Y boolean z =nunchuk_buttonZ (); // статус кнопки z boolean c =nunchuk_buttonC (); // статус кнопки c float pitch =nunchuk_pitch (); // угол тангажа float roll =nunchuk_roll (); // угол крена Джойстик X будет использоваться для перемещения сервопривода №1.
Был использован следующий блок кода. Сначала он проверяет, достаточно ли велико значение джойстика. Таким образом не учитываются шум и небольшие отклонения. Если значение соответствует требованиям, угол сервопривода будет увеличиваться / уменьшаться с заданной скоростью.
// Поворачиваем влево / вправо (с фиксированной скоростью) // Поворачиваем налево if (x> 90) {angle1 - =servo1_speed; display_angles =true; если (угол1 <угол1мин) {угол1 =угол1мин; }} // Поворачиваем направо, если (x <-90) {angle1 + =servo1_speed; display_angles =true; если (угол1> угол1макс) {угол1 =угол1макс; }} s1.write (angle1); // обновляем положение сервопривода Аналогичный блок используется для джойстика y. Он используется для изменения угла сервопривода №3. Сервопривод №2 фиксируется в этом коде.
Вращение захвата определяется углами крена и тангажа контроллера, измеренными его акселерометром. Чтобы упростить управление рукой, угол захвата обновляется только при нажатии кнопок C или Z.
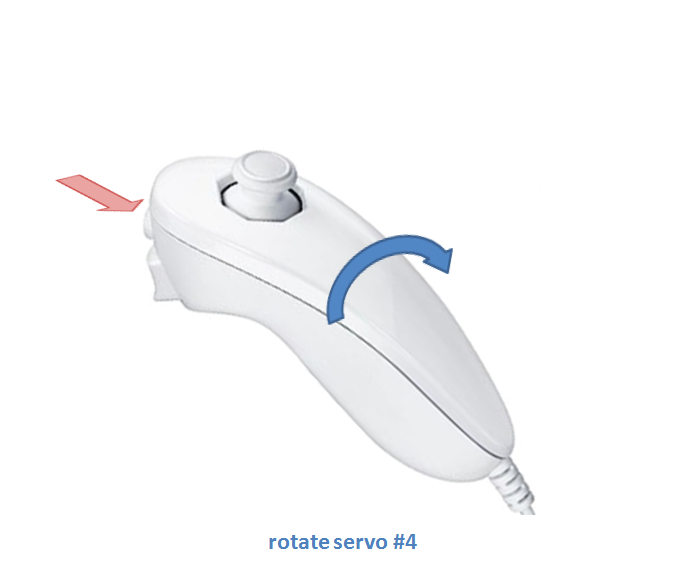
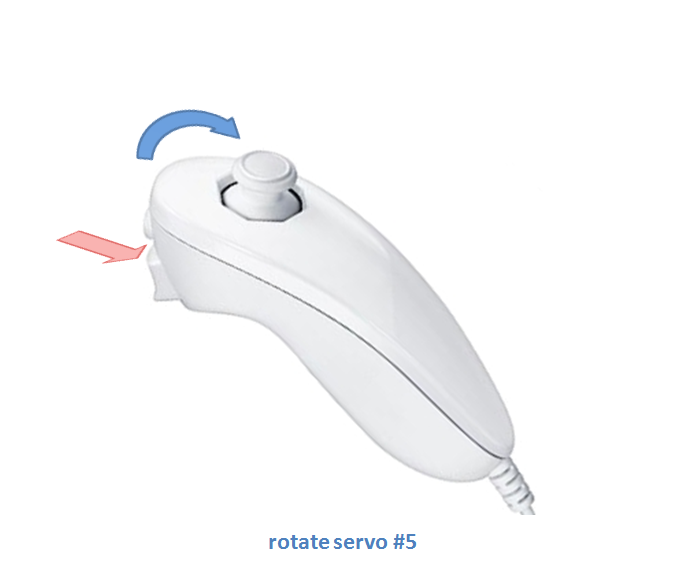
Когда нажата только кнопка C, код считывает угол крена и использует его в качестве уставки. серво № 5 вращается, пока не достигнет заданного значения. Его скорость пропорциональна ошибке между фактическим и желаемым положением. Аналогичный код используется для сервопривода №4, который отслеживает угол наклона Нунчука.
// Включить акселерометр только при нажатии кнопок // Повернуть захват (нажата только кнопка Z) if (c &&! z) {roll =roll * 57.0 + 90.0; // конвертируем в градусы servo5_speed =abs (angle5 - roll) / 10 + 1; // скорость пропорциональна делает ошибку между фактическим и желаемым углом if (roll> angle5) {angle5 + =servo5_speed; display_angles =true; } if (roll Захват закрывается при нажатии кнопок C и Z. Когда любая из этих кнопок будет отпущена, робот откроет захват.
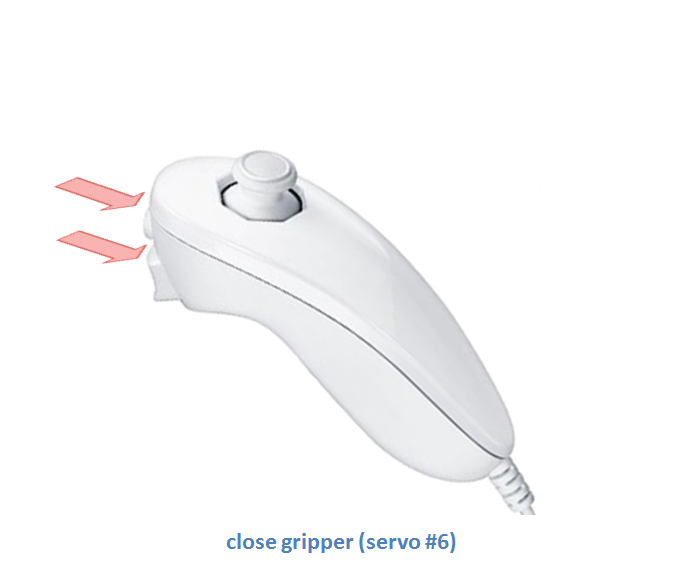
// Открыть / закрыть захват (обе кнопки нажаты) if (z &&c) {s6.write (90); // закрывающий захват display_angles =true; } еще {s6.write (45); // открытый захват} В конце скетча есть блок кода. На последовательном мониторе будет отображаться фактический угол поворота каждого серводвигателя. Это может быть полезно для выбора начального угла каждого двигателя.
nunchuk.ino
Шаг 13:Использование
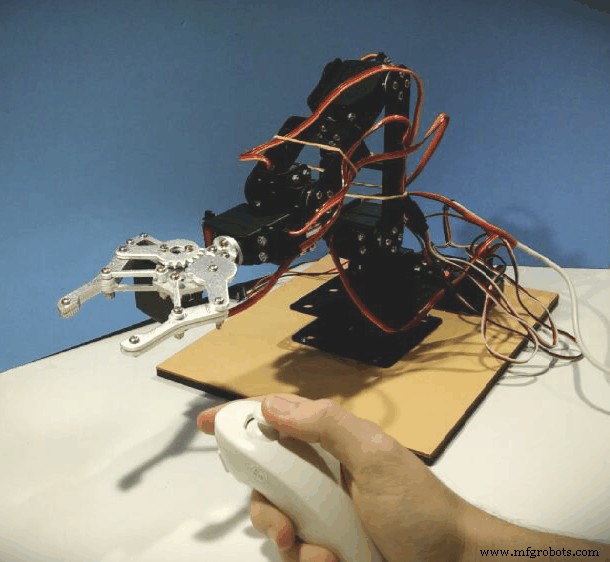
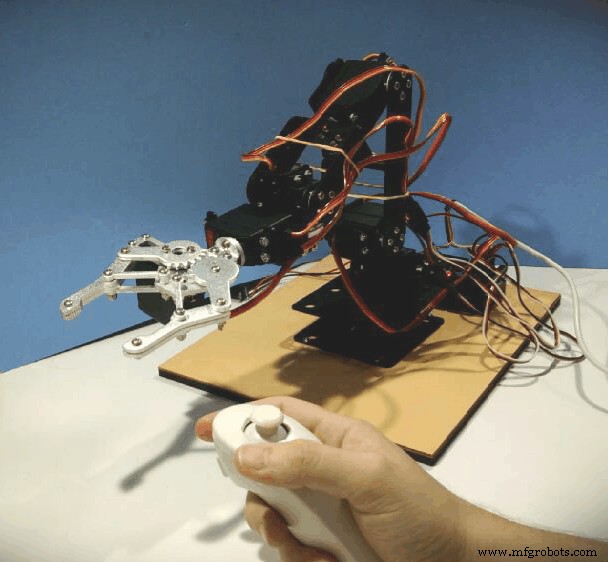
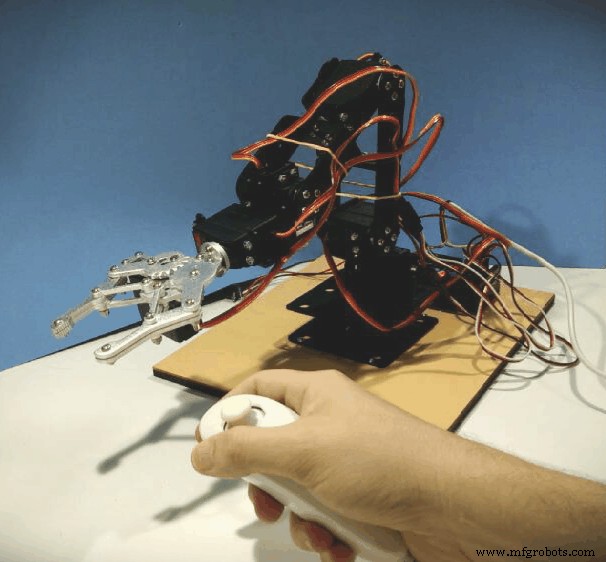
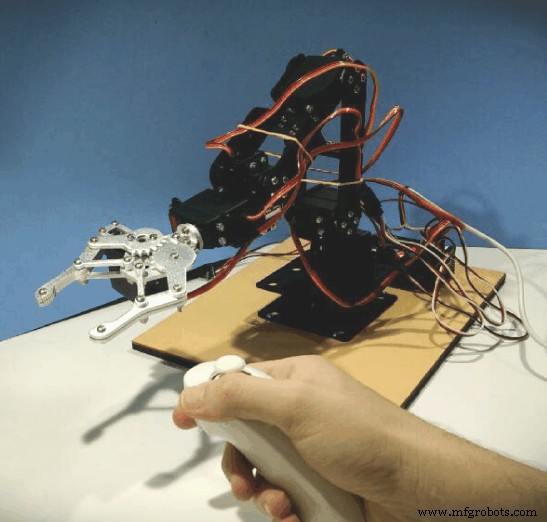
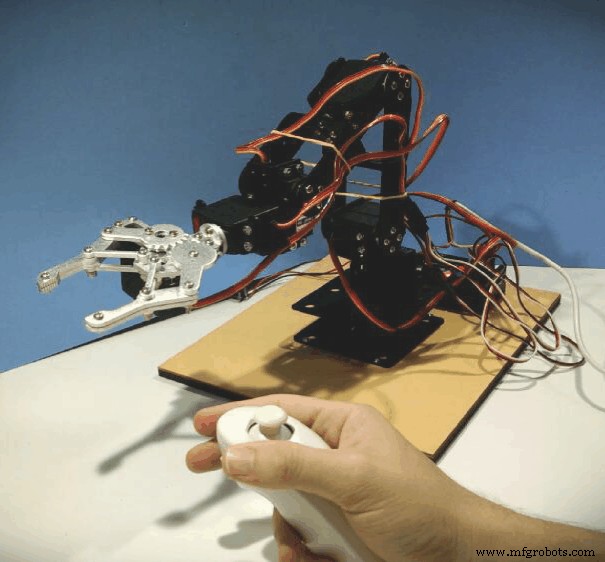
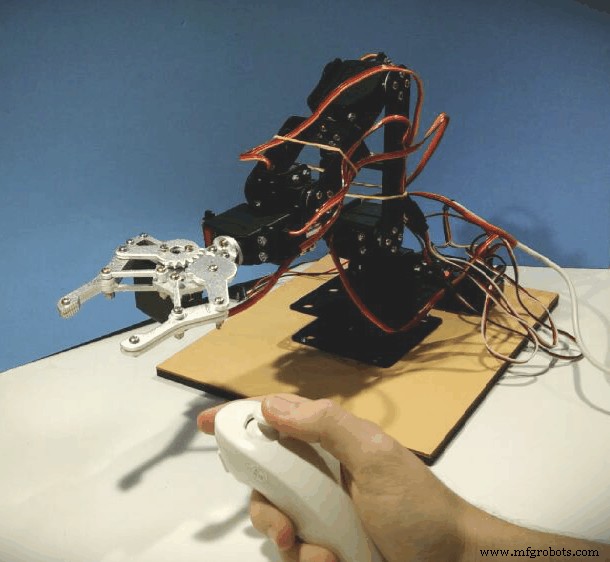
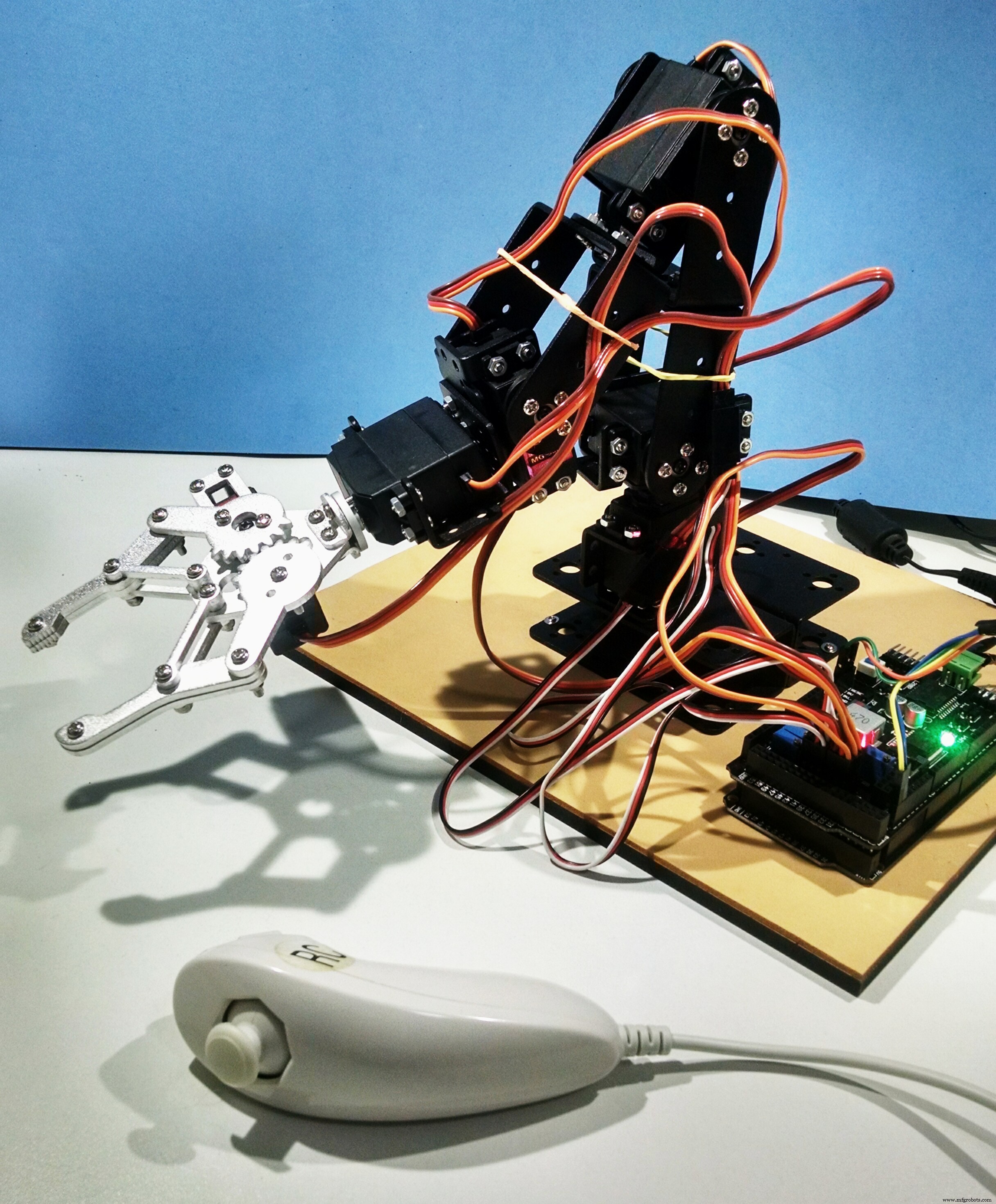
Теперь, когда все готово, включите робота и получайте удовольствие!
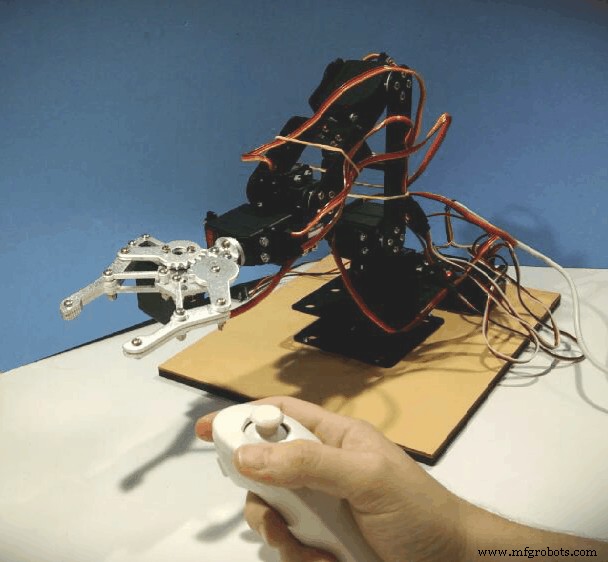
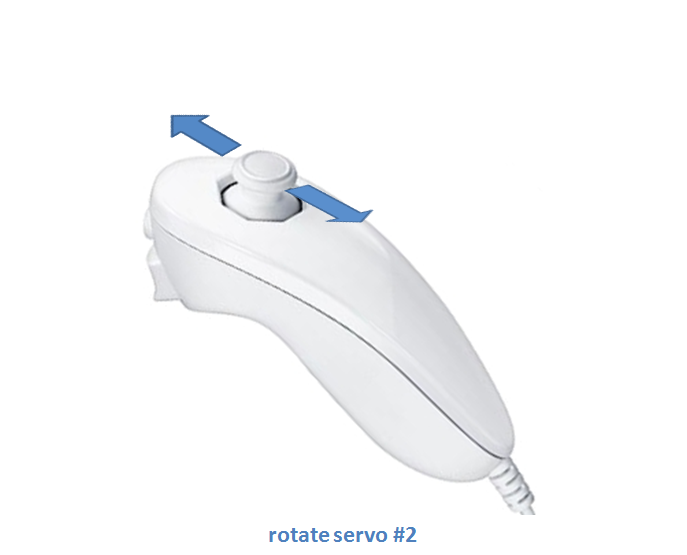
Нунчук используется для управления пятью движениями, показанными на рисунках:вращением вправо / влево, движением вверх / вниз, вращением захвата, движением захвата вверх / вниз и движениями открытия / закрытия захвата. Вы можете комбинировать эти движения для выполнения разных задач.
Вы можете изменить код для разных движений в зависимости от комбинации кнопок и углов джойстика.
Код
- nunchuk.ino
nunchuk.ino Arduino
Нет предварительного просмотра (только загрузка).
Github
https://github.com/infusion/Fritzing/tree/master/Wii-Nunchukhttps://github.com/infusion/Fritzing/tree/master/Wii-NunchukПроизводственный процесс
- Создайте своего робота для видеостриминга, управляемого через Интернет, с помощью Arduino и Raspberry Pi
- Управление монетоприемником с помощью Arduino
- Использование Интернета вещей для удаленного управления манипулятором
- Радиоуправляемая машина с джойстиком
- Arduino с Bluetooth для управления светодиодом!
- Роботизированная рука, напечатанная на 3D-принтере Arduino
- Робот, управляемый речью
- Рука робота, управляемая через Ethernet
- Устройства с голосовым управлением Bluetooth с OK Google
- Простая и умная роботизированная рука с использованием Arduino