


Поворотный энкодер Arduino — руководство по использованию поворотных энкодеров с Arduino
Поворотный энкодер Arduino полезен в станках с ЧПУ, робототехнике и даже в принтерах благодаря своей прочной конструкции и точному цифровому управлению.
Если вы работаете над проектом поворотного энкодера Arduino и вам нужна помощь, вы обратились по адресу.
В сегодняшней статье рассматривается поворотный энкодер, его конфигурация, типы, работа, примеры и приложения.
Что такое поворотный энкодер?
Рис. 1. Поворотный энкодер
Это электромеханический датчик положения, который определяет угловое положение или движение вала или оси.
Затем он преобразует данные углового положения в цифровые или аналоговые выходные сигналы.
Распиновка поворотного энкодера
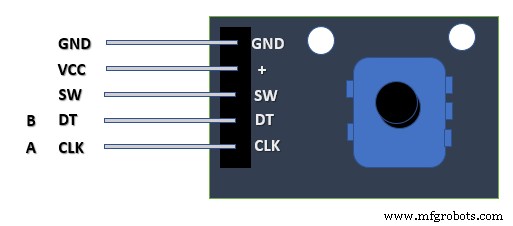
Рис. 2. Разводка поворотного энкодера
- VCC — напряжение питания 3,3 или 5 В.
- ЗЕМЛЯ – Земля
- SW — активная кнопка низкого уровня
- CLK (выход A) — выходной импульс для определения вращения в любом направлении.
- DT (выход B) – отстает от CLK на 90 градусов и определяет направление вращения
Типы поворотных энкодеров
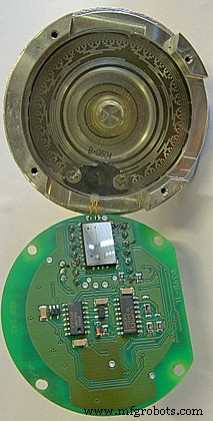
Рис. 3. Абсолютный поворотный энкодер кода Грея с 13 дорожками
Источник:Викимедиа
Абсолютный кодировщик
Состоит из фотоприемника, источника света, диска и преобразователя сигнала. Он сохраняет информацию о местоположении при отключении питания и возобновляет работу при его восстановлении.
Также при сборке устанавливается взаимосвязь между физическим положением управляемого механизма и значением энкодера. Вам не нужно возвращаться к точке калибровки, чтобы сохранить точность положения.
Инкрементальный кодировщик
Инкрементальные энкодеры начинают отсчет с нуля при включении питания и немедленно сообщают об изменении положения. Однако он не сохраняет своего абсолютного положения. Вам нужно будет переместить систему мониторинга в фиксированную контрольную точку, чтобы начать чтение позиции.
Как работает поворотный энкодер?
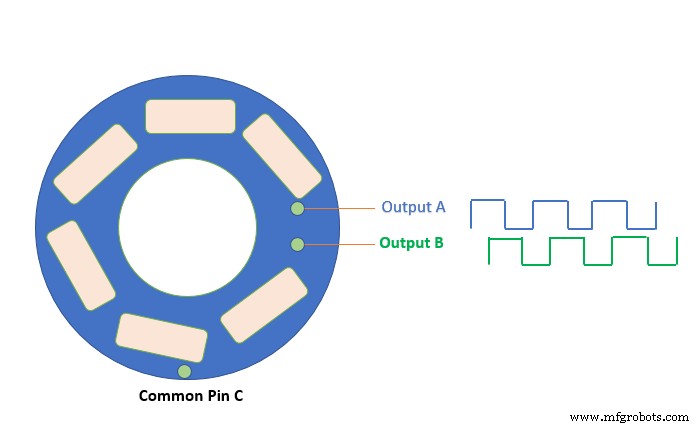
Рис. 4. Работа поворотного энкодера
Он имеет два контактных контакта, A и B, и общий контакт заземления C. Когда вы поворачиваете ручки A и B, контактный контакт C в порядке вращения, они производят сигналы. Кроме того, знаки сдвинуты по фазе друг с другом на 90 градусов (квадратурное кодирование).
Когда вы поворачиваете ручку по часовой стрелке, сначала подключается контакт A, а затем B. Также происходит обратное, когда вы поворачиваете ручку против часовой стрелки.
Затем мы можем отслеживать, когда контакты соединяются с землей и отсоединяются от нее, чтобы определить направление вращения.
Как выбрать поворотный энкодер?
Инкрементальный или абсолютный кодировщик?
Выберите тот, у которого лучшее соотношение стоимости и емкости, или тот, который возвращается к исходному состоянию или не возвращается во время запуска. Кроме того, выберите один в зависимости от устойчивости к шуму и максимальной скорости.
Какое разрешение требуется?
Выберите тот, который соответствует требуемой точности и стоимости оборудования. Поэтому вам следует выбрать один с разрешением от ½ до ¼ точности используемого станка.
Размеры
Учитывайте тип используемого вращающегося вала в отношении монтажного пространства. К вашему сведению, валы могут быть полыми или обычными.
Допустимая нагрузка на вал
При выборе энкодера учитывайте, как методы монтажа влияют на нагрузку на вал и механический срок службы.
Максимально допустимая скорость
Выберите один из них, учитывая его максимальную механическую скорость во время использования.
Максимальная частота ответов
Выберите один на основе максимальной скорости вала устройства при совместном использовании.
Максимальная частота отклика =(Обороты (об/мин)/60) * Разрешение.
Убедитесь, что вы выбрали тот, характеристики которого дают определенную свободу действий в отношении значения максимальной частоты отклика.
Степень защиты
Выберите модель в зависимости от наличия пыли, масла и воды в рабочей среде.
- Только пыль:IP50
- Присутствие воды или масла:IP52 (f), IP64 (f)
- Присутствует масло:выбирайте маслостойкие.
Пусковой крутящий момент вала
В этом случае учитывайте пусковой крутящий момент.
Тип выходной цепи
Здесь учитывайте частоту сигнала, расстояние передачи, шум и устройство подключения.
Преимущества и недостатки поворотных энкодеров
Рис. 5. Механическая часть шагового двигателя и синхронизирующего шкива для 3D-принтеров и станков с ЧПУ
Преимущества
- Высокое разрешение
- Недорогой отзыв
- Высокая точность и надежность
- Компактный
- Сочетает цифровые и оптические технологии.
Недостатки
- Радио и магнитные сигналы мешают работе магнитных энкодеров.
- Прямой свет мешает работе оптических энкодеров.
- Влияет на масло, грязь и пыль.
Пример поворотного энкодера на Arduino
Базовый пример
Вам понадобится плата Arduino, ЖК-дисплей, потенциометр, соединительные провода и макетная плата. Подключите, как показано ниже.
Подключите контакт +V модуля к контакту 5V Arduino и заземлите вашу установку. Затем подключите контакты CLK и DT к цифровым контактам 2 и 3 соответственно.
Управление шаговым двигателем с помощью поворотного энкодера
Вам понадобится плата Arduino, плата шагового двигателя и драйвера, поворотный энкодер и макетная плата.
Подключите GND энкодера к GND Arduino, а + к контакту Arduino 5V. Кроме того, подключите DT к аналоговому контакту 5 Arduino, а CLK — к аналоговому контакту 4 Arduino.
Управление серводвигателем с помощью поворотного энкодера
Поворотные датчики имеют решающее значение в проектах, где требуется точное положение объектов, таких как рука робота.
Для использования заземлите коричневый/черный провод серводвигателя. Также подключите красный провод серводвигателя к источнику 5 В. Наконец, оранжево-желтый провод к контакту 9 с включенной ШИМ.
Заключение
Как мы видели, вы можете использовать поворотный энкодер с Arduino для многих ваших проектов. Они просты в использовании, универсальны и дешевы в приобретении. Если вам нужна помощь в вашем проекте, или если у вас есть какие-то непонятные вопросы, требующие разъяснения, свяжитесь с нами.
Промышленные технологии
- Протоколы связи:обзор параметров для приложений кодировщика
- ЖК-панель с Arduino для симулятора полета
- Переключатель / светодиодная панель с Arduino для FS2020
- 6 простых советов по ремонту кодировщика и устранению неисправностей
- Затемнение света с ШИМ с помощью кнопки
- Система посещаемости с использованием Arduino и RFID с Python
- Простое измерительное колесо с поворотным энкодером, сделанное своими руками
- Использование переносного датчика пульса MAX30100 с Arduino
- Использование перфорированного листового металла для вентиляции
- Поворотные энкодеры повышают точность абсолютного позиционирования робота