


Протоколы связи:обзор параметров для приложений кодировщика
В этой статье обсуждается использование кодировщика для обеспечения точного постоянного отслеживания вала ротора двигателя и ключевые факторы, которые помогут при выборе кодировщика. на основе разных параметров.
Растущее использование двигателей в робототехнике, промышленных приводах, системах автоматизации производства, объектах производства возобновляемой энергии и т. Д. В сочетании с растущей потребностью в более энергоэффективной работе привело к значительному увеличению использования энкодеров в последние годы. В недавнем отчете Insight Partners по этому вопросу аналитическая фирма прогнозирует, что совокупный годовой темп роста мирового рынка кодировщиков (CAGR) составит 10,2% в период с настоящего момента до 2027 года. Следовательно, ожидается, что этот рынок будет к концу этого периода будет стоить 3,45 миллиарда долларов в год.
Чтобы максимально повысить эффективность работы двигателя, необходимо точное постоянное отслеживание вала его ротора. Это позволит получать постоянные данные о положении ротора, а также о скорости и направлении его движения. Такие функции могут быть реализованы путем включения кодировщика в конструкцию системы. Однако, прежде чем принять решение о характере кодировщика, который будет указан, вам необходимо понять ключевые факторы, которые будут влиять на это решение с учетом набора требований к применению или логистики.
Абсолютное или инкрементное?
При выборе кодировщика доступно несколько возможных вариантов. Инкрементальный тип поможет определить положение относительно опорной точки, в то время как абсолютный энкодер присваивает уникальный код каждому потенциальному положению ротора (рисунок 1).
Хотя инкрементальные энкодеры дешевле и проще в реализации, абсолютные энкодеры имеют очевидные эксплуатационные преимущества, связанные с ними. Наиболее заметным преимуществом использования абсолютных кодировщиков является тот факт, что они имеют немедленный ответ (поскольку им просто нужно идентифицировать конкретный код). С их помощью можно определить положение ротора, как только система будет активирована. Это особенно полезно в сценариях приложений, критичных для безопасности.
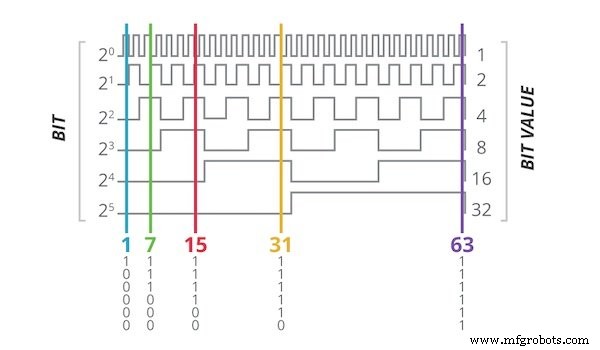
Рис. 1. Каждое потенциальное положение ротора на абсолютном энкодере имеет уникальный код
Какой тип кодировщика следует использовать?
Существует также несколько различных способов реализации механизма кодирования. Часто используется оптическое зондирование. Однако у этого есть определенные недостатки, особенно в тяжелых промышленных условиях, так как присутствие грязи, жира или масла может скрыть части диска кодировщика, что затрудняет получение правильных результатов сопутствующим фотодатчиком. Постоянное воздействие ударов или вибрации также может привести к повреждению диска и необходимости его замены. Также требуется точное выравнивание, которое может быть итеративным и длительным процессом.
Хотя магнитные кодировщики избавляются от проблемы прямой видимости, которая мешает оптическим кодировщикам, у них есть свои недостатки. Они относительно энергоемкие и не поддерживают высокое разрешение. Именно по этим причинам емкостные абсолютные энкодеры, подобные тем, что представлены в серии AMT устройств CUI Devices, сейчас пользуются большим спросом. Эти емкостные энкодеры нечувствительны к пыли, грязи и жирам.
Наряду с этим, они обладают высокой устойчивостью к вибрациям и экстремальным температурам. Они обеспечивают постоянную надежность, длительный срок службы и безотказную работу - поскольку, в отличие от оптических энкодеров, они менее подвержены механическому износу. В то же время они могут обеспечить гораздо более высокую степень точности, чем их магнитные эквиваленты (рис. 2).
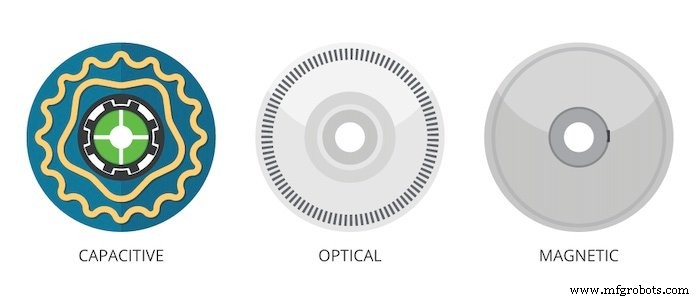
Рис. 2. Сравнение дисков кодировщика для емкостных, оптических и магнитных кодировщиков
Интеграция кодировщика
Приняв решение о механизме кодировщика, следующий элемент, который необходимо решить, - это взаимодействие кодировщика с хост-системой. Можно использовать широкий спектр интерфейсных протоколов. Поэтому важно понимать различия между ними, чтобы выбрать наиболее подходящий вариант.
Последовательные интерфейсы обычно используются для связи в промышленных системах. RS-485, последовательный периферийный интерфейс (SPI) и синхронный последовательный интерфейс (SSI) являются одними из самых известных из этих протоколов.
SPI предоставляет двунаправленный интерфейс, способный поддерживать полнодуплексный режим. Поскольку существует множество узловых микроконтроллеров (MCU), в которые напрямую встроен порт SPI, это удобное средство для реализации системы кодировщика, требующее минимальных усилий и времени. Может поддерживаться повышенная скорость передачи данных, и ее также легко настроить.
Использование SPI будет оптимальным, когда используемые расстояния межсоединений относительно короткие (в идеале - менее одного метра). Допускаются и большие расстояния, но необходимо снизить скорость передачи данных для поддержания приемлемой помехоустойчивости. Серия AMT22 от CUI Devices является одним из таких кодировщиков SPI с максимальной тактовой частотой 2 МГц. По запросу энкодер может обеспечить чрезвычайно быструю обратную связь по положению в течение 1500 нс на главный микроконтроллер. Расширенные команды также могут использоваться через соединение SPI для установки нулевой точки или сброса энкодера.
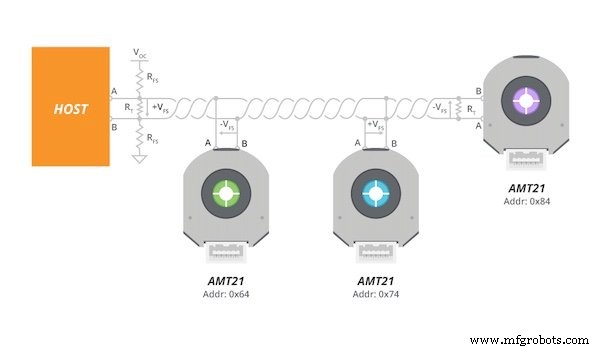
Рис. 3. Пример конфигурации SPI с общим тактовым сигналом, MOSI и MISO и уникальной линией выбора микросхемы
RS-485 лучше подходит для более длинных межсоединений, чем SPI, или для использования в ситуациях, когда присутствуют значительные электрические помехи. Поскольку это протокол асинхронного интерфейса, он не требует тактового сигнала. Его дифференциальная передача сигналов обеспечивает подавление синфазного шума, а его высокая помехозащищенность означает, что его можно использовать в чрезвычайно сложных условиях, где преобладают электромагнитные помехи (EMI).
В отличие от SPI, нет необходимости ограничивать скорость передачи данных при увеличении расстояния. Со специальным приемопередатчиком RS-485 скорость передачи данных может достигать 10 Мбит / с или выше, в зависимости от расстояния, на которое данные должны пройти по кабелю витой пары. Затем на каждом конце кабеля устанавливается сопротивление, равное характеристическому сопротивлению.
Еще одно важное преимущество RS-485 заключается в том, что к одной шине можно подключить несколько энкодеров (рисунок 4). Для реализаций, основанных на технологии RS-485, кодировщик AMT21 представляет собой решение. Его протокол по умолчанию, состоящий из восьми битов данных, без контроля четности и одного стопового бита, работает, когда два младших бита определяют команду кодировщика, а остальные 6 битов используются в качестве адреса кодировщика. Это означает, что до 64 кодировщиков могут использовать одну и ту же шину, что дает преимущества в сложных крупномасштабных реализациях. Кодеры AMT21 также могут отвечать на запросы позиционирования от хоста в течение периода 3 мкс.
Рис. 4. Пример конфигурации RS-485 с несколькими кодировщиками, подключенными к хосту
Данные, передаваемые через SSI, синхронизируются передатчиком и приемником по общему тактовому сигналу. Этот симплексный протокол односторонней связи основан на дифференциальной передаче сигналов и представляет собой очень экономичное интерфейсное решение. Он может обрабатывать межсоединения такой же длины, что и SPI, и имеет сопоставимые шумовые характеристики.
Серия AMT23 устройств CUI предлагает решение в ситуациях, когда в качестве интерфейса выбран SSI. Вариант стандартного протокола SSI для устройств CUI Devices поставляется с трехпроводным интерфейсом SSI, включающим соединение с выбором микросхемы, что упрощает установку и упрощает интерфейс между хостом и кодировщиками. Функция выбора микросхемы позволяет хосту активировать определенные отдельные энкодеры на шине, в то время как энкодер отвечает, просто помещая данные о местоположении на шину.
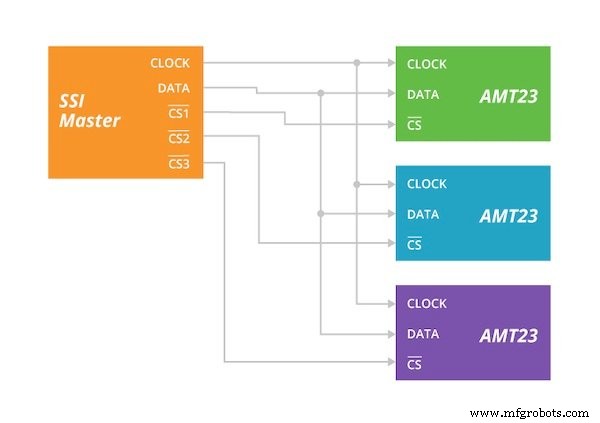
Рис. 5. Трехпроводная конфигурация SSI с функцией выбора микросхемы
Заключение
Благодаря обширному портфелю емкостных абсолютных энкодеров, поставляемых CUI Devices, и множеству интерфейсных технологий, поддерживаемых этими устройствами, инженеры смогут найти решение, соответствующее их конкретным требованиям приложения. В ситуациях, когда возможны большие расстояния между подключениями или необходимость снижения уровня шума, рекомендуется использовать интерфейс RS-485.
Если прямая реализация является приоритетом, то хорошим вариантом будет кодировщик с функциональностью интерфейса SPI. Это подтверждается тем фактом, что он поддерживается микроконтроллерами от множества различных поставщиков полупроводников. Когда развертывание системы должно быть максимально упрощенным, с минимальными затратами и очень небольшим занимаемым пространством, тогда SSI может быть лучшим решением.
Отраслевые статьи - это форма содержания, которая позволяет отраслевым партнерам делиться полезными новостями, сообщениями и технологиями с читателями All About Circuits, что не подходит для редакционного содержания. Все отраслевые статьи подлежат строгим редакционным правилам с целью предлагать читателям полезные новости, технические знания или истории. Точки зрения и мнения, выраженные в отраслевых статьях, принадлежат партнеру, а не обязательно All About Circuits или ее авторам.
Система управления автоматикой
- Преимущества использования Robotic Vision для приложений автоматизации
- Местные варианты топливных баков для строительных приложений
- 6 простых советов по ремонту кодировщика и устранению неисправностей
- Какие существуют различные варианты отделки металла?
- Лучшие варианты изготовления корпусов для электроники
- Как правильно выбрать датчик для заполнения приложений
- Лучшие гидравлические дисковые тормоза для промышленного применения в 2020 году
- Протокол связи Bluetooth — Полное руководство по протоколу для учащихся
- Каковы наиболее распространенные области применения переменного тока?
- Применения для литья в песчаные формы для рынка тяжелого оборудования